管道機器人自動適應機構設計與越障分析
2018-06-24 09:39:42薛耀勇張繼忠
制造業自動化 2018年6期
關鍵詞:分析
薛耀勇,張繼忠,張 磊
(1.青島大學 機電工程學院,青島 266071;2.中國海洋大學 工程學院,青島 266100)
0 引言
在一般工業、核設施、石油天然氣、軍事裝備等領域中,管道作為一種有效的物料輸送手段而得到廣泛的應用。為提高管道的壽命、防止泄漏等事故的發生,就必須對管道進行有效的檢測維護,管道機器人為滿足該需要而產生[1]。目前國內外管道機器人的研究成果已經很多,可是在微小管道、特殊管道(如變徑管道、帶有U型管的管道)進行檢測、維修還剛起步,由于該類管道在各個領域的廣泛應用,該類機器人極具研究意義[2]。
履帶式機器人能夠很好地適應管道的變化,有著良好的機動性能[3,4],在越障、爬行等方面有著比較明顯的優勢,正成為國內、外相關領域研究的重點[5]。上海交通大學張云偉等人研發了一種利用絲杠螺母進行傳動、平行四邊形桿系支撐行走輪的進行漏磁檢測的管道機器人[6]。曹建樹等人采用ADAMS參數化建模與優化設計功能對管道機器人變徑機構進行了優化設計,提高了機器人驅動效率、改善了其性能[7]。張建偉等人研制了一種新型可變徑管道機器人,能夠適應不同管徑的管道并進行了控制實現[8]。本文設計了一款具有管徑自適應功能的履帶式管道機器人,針對機器人在豎直管道內越障狀態進行了受力分析,設計了所需自動適應元件圓柱螺旋彈簧,對自動適應機構進行了動力學分析,提高了管道機器人自動適應管徑變化的能力和在管道中的越障能力,為以后管道機器人的研究奠定了基礎。
1 機器人系統構成
設計了一種具有管徑自適應功能的履帶式管道機器人,如圖1所示。
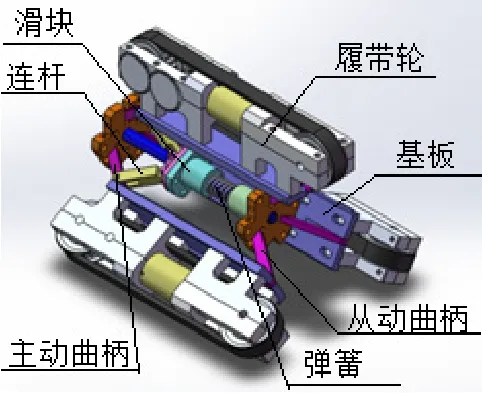
圖1 履帶式自適應管道機器人
該管道機器人主要包括自動適應裝置和履帶行走裝置。自動適應裝置中安裝有主動曲柄、從動曲柄、連桿、滑塊、圓柱螺旋彈簧等零部件,彈簧元件提供的彈簧力通過滑塊推動連桿改變主動曲柄以及從動曲柄的支撐角度使履帶輪緊貼管道內壁,履帶行走裝置為三個履帶輪,每個履帶輪分別由獨立電機驅動行走。該機器人具有良好的越障能力,能自動適應210~220mm范圍內不同管徑的管道。機器人在管內行走時,履帶依靠彈簧力轉化而來向外的撐力而緊緊壓在管道內壁上,履帶將與管道內壁發生相對滑動,產生與機器人行進方向一致的摩擦力,機器人靠這一摩擦力實現在管道內的爬行,而且在垂直管道內爬行時,有足夠大的驅動力來克服重力與各種爬行阻力,使機器人履帶輪緊貼管道內壁上升或下降。
2 機器人越障受力分析
機器人在圓形管道內豎直向上爬行時,不可避免地會遇到障礙,這對機器人在管道內正常行走造成了一定的影響[9]。為保證所要設計機器人的越障性能,在此將障礙假設為同心垂直臺階[10]。為使機器人能夠成功地越過障礙,我們需要對機器人的越障能力進行研究,對其通過同心垂直臺階這一過程進行受力分析。
機器人在管道內爬行的速度較低,所以當機器人通過同心垂直臺階時,我們可以對機器人進行靜力學分析,并建立靜力學平衡方程求出機器人在跨越同心垂直臺階時的受力與機器人各結構參數以及同心垂直臺階的高度之間的關系,從而確定該管道機器人的越障能力。由于機器人履帶輪較長,在跨越同心垂直臺階的實際過程中,各個零部件之間難免會產生相對微小的變化和位移,因此在分析機器人越障過程中的受力時考慮實際越障存在的問題。
如圖2所示,當管道機器人前端履帶輪剛接觸到同心垂直臺階時,管道機器人受到自身的重力G,平行四邊形支撐桿系對履帶輪的壓力FN,管道內壁對履帶輪的正壓力N1、N2,同心垂直臺階的外邊緣對機器人指向履帶輪前輪中心方向上的支撐力N3和此處履帶運動方向上的摩擦力F3,以及管道內壁和履帶之間的摩擦力F1、F2。管道內壁的附著系數為μ。

圖2 機器人跨越垂直臺階的臨界狀態受力分析圖
圖2中其余參數的含義如下:
L為機器人履帶輪前輪和后輪之間的中心距;
r為履帶輪半徑;
h0為機器人重心至履帶輪前后輪中心連線的垂直距離;
hω為同心垂直臺階的高度;
α為F3方向與水平方向的夾角。
根據圖2可以列出管道機器人在此臨界狀態時的靜力學平衡方程組(1):

在考慮機器人的自適應機構中的平行四邊形支撐桿系發生微小變形這一實際情況下,在機器人前端帶輪即將越障的臨界狀態時的靜力學平衡方程組如方程組(1)所示。此時,機器人履帶輪前輪并未離開管道內壁,仍受到管道內壁對其的正壓力N1、N2,當管道機器人繼續向上爬行,使前輪剛好離開管道內壁,而考慮機器人自適應機構中的平行四邊形支撐桿系發生微小變形這一實際情況后,管道內壁對履帶輪后輪仍然有正壓力,則此時管道內壁對機器人的正壓力N1=0,此處摩擦力F1=0,將其代入上面的方程組中,則方程組(1)可以簡化為方程組(2):
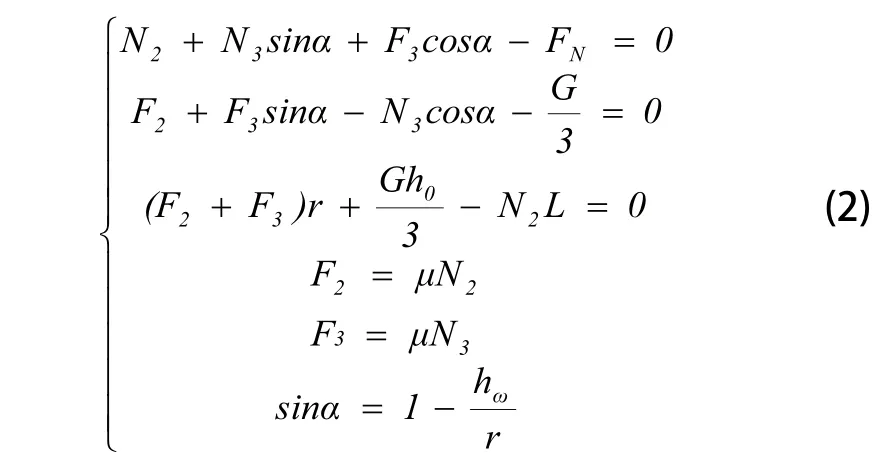
由以上方程組(2)可以得到此狀態時:
各力的表達式,如方程組(3)所示:
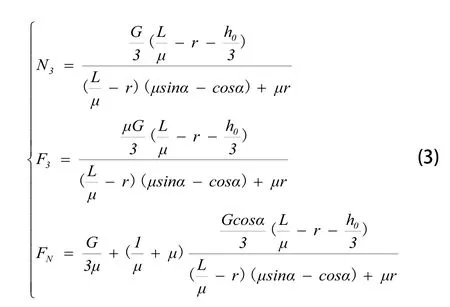
根據方程組(3),將機器人的重力G=30N、管道內壁的附著系數μ=0.75、越障同心臺階高度hω=3mm、機器人重心至履帶輪前后輪中心連線的垂直距離h0=81.74mm、機器人履帶輪前輪和后輪之間的中心距L=174mm、履帶輪半徑r=23.5mm等參數代入其中即可求出機器人越3mm同心垂直臺階所需要平行四邊形支撐桿系對機器人履帶輪的正壓力FN=52.6N。
經過對機器人越障過程中履帶輪的受力分析可知,機器人前端帶輪即將越障的臨界狀態是管道機器人在越障過程中所受阻力最大的極限狀態,極限狀態下單個履帶輪所需自適應機構的平行四邊形支撐桿系提供的正壓力FN經計算為52.6N,那么整個機器人三個徑向均布的履帶輪所受前進阻力以及所需要平行四邊形支撐桿系提供的正壓力都是單個履帶輪所受前進阻力以及所需平行四邊形支撐桿系提供的正壓力的三倍,則通過對管道機器人越障過程中的受力分析,為之后管道機器人自動適應機構彈簧元件的設計奠定了基礎。
3 自適應元件螺旋圓柱彈簧設計
3.1 螺旋圓柱彈簧主要參數的設計
根據管道機器人越3mm障礙,得到履帶輪對管道內壁壓力然后為了安全起見按照運用ADAMS對管道機器人自動適應機構進行靜力學分析得到在管徑220mm時彈簧為滿足管道機器人越障的要求需要提供140N的彈力、在管徑210mm時彈簧為滿足管道機器人越障的要求需要提供180N的彈力。
根據工作條件,材料選用Ⅲ類碳素彈簧鋼絲。通過估取并檢驗的方法最終得到彈簧中徑D2=18mm并確定其許用應力為637.5MPa。根據強度條件計算出彈簧鋼絲直徑d為2.5mm。根據剛度條件計算出彈簧工作圈數n為9.5圈。
3.2 螺旋圓柱彈簧其他結構參數的計算
根據彈簧在提供140~180N彈力的過程中彈簧的形變量為5.6mm計算出彈簧剛度為Kp=7.0N/m。
根據彈簧剛度計算出彈簧各種狀態下所受載荷、彈簧壓縮量以及對應的彈簧長度,如表1所示。

表1 彈簧各狀態下壓縮量以及彈簧長度
根據所設計的管道機器人結構參數計算得在中心軸上需要加一個25.6mm的套筒,自由狀態下彈簧長度為55.8mm,此時彈簧安裝長度加上套筒的長度為81.4mm小于機器人結構要求的安裝長度97.7mm,因此是符合要求的。
4 自適應機構動力學仿真分析
4.1 創建自動適應機構模型
彈簧在管徑220mm到管徑210mm變化過程中可以提供的彈簧力為140.8~180N,那么彈簧在管徑220mm至管徑210mm變化過程中所提供的彈簧力大小可以用下面的函數來表示。

式中x為連桿與中心軸滑塊連接板之間的連接點相對于中心軸前支架與主動曲柄之間連接點的橫坐標;
y表示彈簧提供的彈力。
利用ADAMS完成了管道機器人自動適應機構仿真模型的創建,如圖3所示。

圖3 自動適應機構仿真模型
4.2 仿真分析及結果
主動曲柄和連桿之間添加的轉動副處合力變化情況,主動曲柄和基板之間添加的轉動副處Z軸方向分力變化情況,從動曲柄和基板之間添加的轉動副處合力和Z軸方向分力變化情況如圖4~圖7所示。

圖4 主動曲柄和連桿轉動副合力變化

圖5 主動曲柄和基板轉動副處Z軸方向分力變化
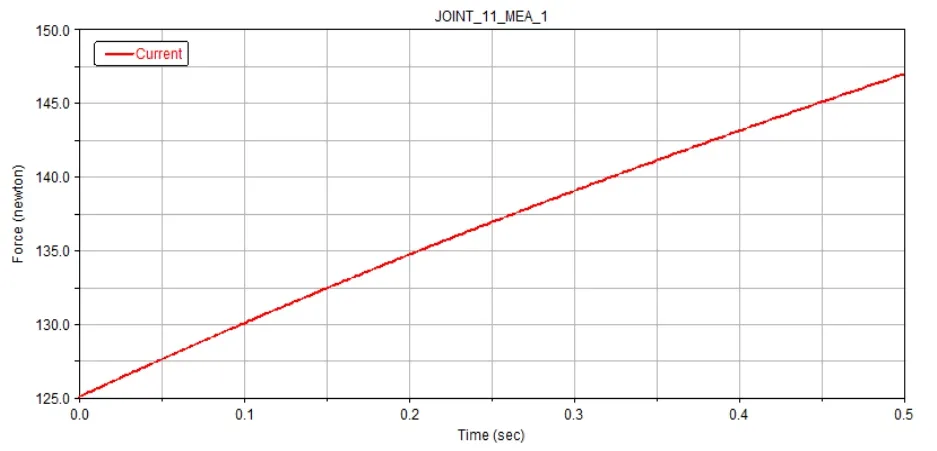
圖6 從動曲柄和基板轉動副處合力變化
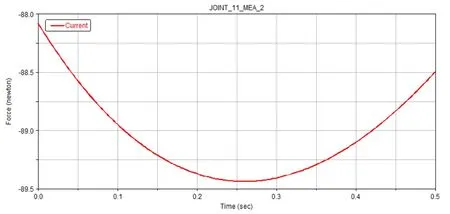
圖7 從動曲柄和基板轉動副處Z軸方向分力變化
對主動曲柄和基板之間添加的轉動副處Z軸方向分力變化情況、從動曲柄和基板之間添加的轉動副處Z軸方向分力變化情況進行處理便可以得到所設計的彈簧提供的彈力傳遞給基板,然后由基板、履帶輪這個固定件施加給管道內壁的壓力大小為180.3N~183.1N,如圖8所示。
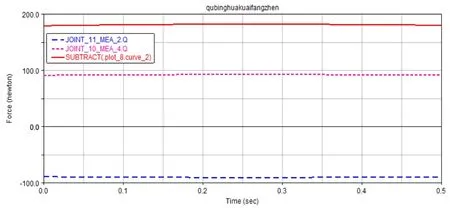
圖8 履帶輪對管道內壁壓力
履帶輪實際提供給管道內壁的壓力180.3N~183.1N可以滿足管道機器人所需要對管道內壁提供的壓力157.8N,從而滿足管道機器人越3mm障礙的性能要求。而且,經過運用ADAMS對管道機器人自動適應機構進行動力學仿真分析,得到了自動適應機構關鍵節點的受力情況,為以后關鍵零部件的有限元分析奠定了基礎。
5 結論
設計了一種具有管徑自適應功能的履帶式管道機器人,對機器人在管道內豎直向上爬行過程中攀越垂直障礙狀態進行了受力分析,設計了所需自動適應元件圓柱螺旋彈簧,對自動適應機構進行了動力學分析,經分析得到履帶輪實際提供給管道內壁的壓力可以滿足管道機器人所需要對管道內壁提供的壓力157.8N,從而滿足管道機器人在豎直管道內向上越3mm障礙的性能要求。
[1]王殿君,李潤平,黃光明.管道機器人的研究進展[J].機床與液壓,2008,36(4):185-187.
[2]甘小明,徐濱士,董世運,等.管道機器人的發展現狀[J].機器人技術與應用,2003(6):5-10.
[3]ShigeoHirose, Hidetaka Ohno,,TakeoM itsui Kiichi Suyama.Design of in-pipe in spection vehicles forφ25,φ50,φ150 pipes[J].IEEE International Conferenceon Robotics and Automation,1999,5:2309-2314.
[4]Dongxiang Chi,GuozhengYan. From wired to wireless a miniature robot for intestinal inspection[J].Journal of Medical Engineering&Technology,2005,27(2):71-79.
[5]趙建偉,楊壘,商德勇,等.薄煤層工作面巡檢機器人越障動力學建模與分析[J].制造業自動化,2015,(15):7-9.
[6]張云偉,顏國正,丁國清,等.煤氣管道機器人管徑適應調整機構分析[J].上海交通大學學報,2005,(6):950-954,959.
[7]曹建樹,曹振,徐寶東.基于ADAMS的管道機器人變徑機構優化設計[J].制造業自動化,2015(14):1-4.
[8]張建偉,齊詠生,王林.一種新型可變徑管道機器人的結構設計與控制實現[J].測控技術,2014,33(10):64-67.
[9]樸春日,顏國正,王志武,等.一種履帶式機器人設計及其越障分析[J].現代制造工程,2013,(3):24-27.
[10]莊皓嵐,顏國正,王志武,等.多節履帶式機器人系統組成和越障性能研究[J].測控技術,2013,32(8):59-62,66.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
