拉臂車事故案例分析與安全設(shè)計要點研究
2018-06-25 08:32:24陳琛,占海
裝備制造技術(shù) 2018年4期
陳 琛,占 海
(深圳東風(fēng)汽車有限公司,廣東 深圳 518109)
0 前言
拉臂車與連體壓縮垃圾廂配套使用,成為城市生活垃圾收集運輸?shù)某S梅绞街弧_B體壓縮垃圾廂通常置于城市路邊僻靜角落的垃圾站內(nèi),用于收集周邊城區(qū)垃圾,并對收集的垃圾進行壓縮處理,通過拉臂車將連體壓縮垃圾廂運往垃圾中轉(zhuǎn)站或垃圾填埋場傾倒。拉臂車運載連體壓縮垃圾廂時有鉤廂、卸料、卸廂的工作流程。本文以拉臂車鉤載連體壓縮垃圾廂在垃圾中轉(zhuǎn)站卸載垃圾時出現(xiàn)的兩起事故為例,通過數(shù)據(jù)推算,分析事故原因及現(xiàn)有拉臂車存在的安全可靠性問題,針對問題研究改進方法。
1 拉臂架的結(jié)構(gòu)及動作互鎖原理
拉臂車由底盤和拉臂架通過連接件及輔件組成。拉臂架的主要構(gòu)件有:副梁、翻轉(zhuǎn)臂、連接臂、伸縮臂、舉升油缸等,如圖1所示。

圖1 拉臂架的結(jié)構(gòu)組成
拉臂架有兩個互鎖行程閥:鎖廂行程閥和鎖臂行程閥(見圖2)。鎖廂行程閥位于拉臂架副梁左側(cè)中部;鎖臂行程閥位于翻轉(zhuǎn)臂上靠近廂體鎖緊機構(gòu)右側(cè)或廂體鎖緊機構(gòu)下方。
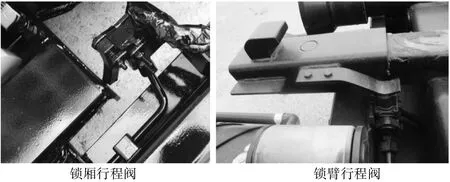
圖2 拉臂架的兩個互鎖行程閥
拉臂車動作互鎖原理:
廂體鎖緊機構(gòu)處于鎖廂狀態(tài)時,鎖臂行程閥解鎖,伸縮臂不能動作(伸縮油缸油路被切斷),連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)處于鎖緊狀態(tài),連接臂/翻轉(zhuǎn)臂/連體壓縮垃圾廂被鎖為一體(卸料體),卸料體在舉升油缸推動下可以繞導(dǎo)向輪后下方的轉(zhuǎn)軸翻轉(zhuǎn),當(dāng)卸料體翻轉(zhuǎn)離開副梁后,鎖廂行程閥被松開,廂體鎖緊機構(gòu)油缸油路被切斷,廂體鎖緊機構(gòu)不能動作,拉臂車處于卸料狀態(tài)。
廂體鎖緊機構(gòu)處于解鎖狀態(tài)時,鎖臂行程閥被壓下,伸縮油缸油路被接通,伸縮臂可以在連接臂內(nèi)滑動,連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)處于解鎖狀態(tài)。當(dāng)連接臂繞連接臂/翻轉(zhuǎn)臂轉(zhuǎn)軸轉(zhuǎn)動離開副梁后,鎖廂行程閥松開,廂體鎖緊機構(gòu)油路被切斷,廂體鎖緊機構(gòu)不能動作。同時位于連接臂/翻轉(zhuǎn)臂轉(zhuǎn)軸兩端的半圓柱旋入副梁半圓槽內(nèi),翻轉(zhuǎn)臂被鎖定在副梁上。此時拉臂車處于鉤廂/卸廂狀態(tài)。
連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)有兩種型式:以吉馬拉臂架為代表的液壓鉤鎖式和以海沃拉臂架為代表的機械插鎖式(見圖3)。
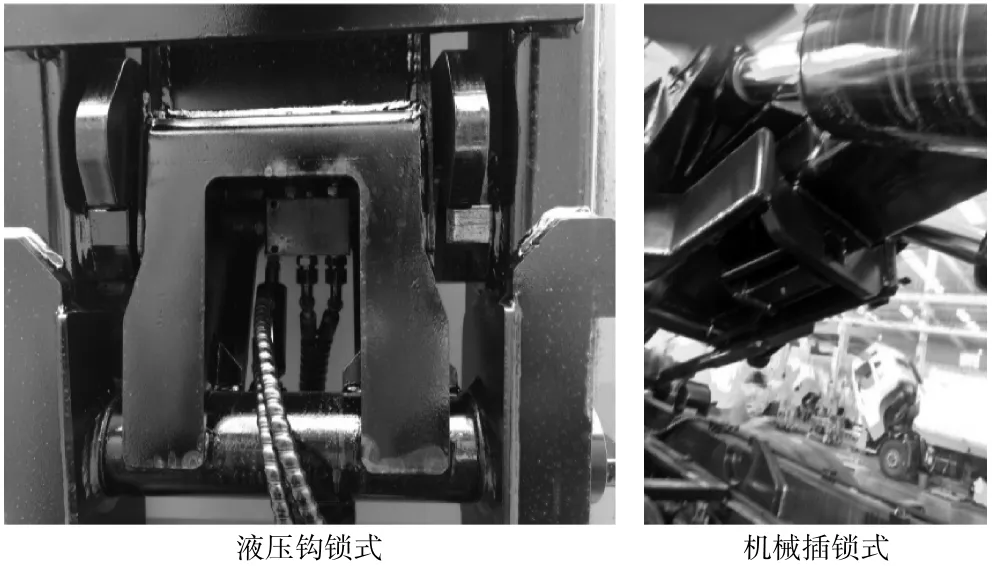
圖3 連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)的兩種型式
液壓鉤鎖式鎖緊機構(gòu)與廂體鎖緊機構(gòu)為聯(lián)動設(shè)計。在廂體鎖緊機構(gòu)處于解鎖狀態(tài)時,鎖臂行程閥被壓下,伸縮油缸油路接通,伸縮臂在伸縮油缸的推動下沿連接臂外伸,當(dāng)伸縮臂外伸到位后,廂體鎖緊機構(gòu)開始鎖廂,同時液壓鉤鎖式鎖緊機構(gòu)油缸推動鎖鉤轉(zhuǎn)動,鉤住位于翻轉(zhuǎn)臂上的配對鎖塊,將連接臂/翻轉(zhuǎn)臂/連體壓縮廂鎖為一體(卸料體)。反之,廂體鎖緊機構(gòu)解鎖,同時液壓鉤鎖式鎖緊機構(gòu)油缸縮回,帶動鎖鉤轉(zhuǎn)動,鎖鉤與鎖塊分離。
機械插鎖式鎖緊機構(gòu)的動作原理是:在廂體鎖緊機構(gòu)處于解鎖狀態(tài)時,鎖臂行程閥被壓下,伸縮油缸油路接通,伸縮臂在伸縮油缸的推動下沿連接臂外伸,伸縮臂外伸過程中,鎖緊機構(gòu)的方塊插鎖在彈簧力作用下插入固定在翻轉(zhuǎn)臂前端的方孔插板內(nèi),將連接臂/翻轉(zhuǎn)臂/連體壓縮廂鎖為一體(卸料體)。反之,伸縮臂回縮過程中,內(nèi)置端推動方塊插鎖與方孔插板分離,鎖緊機構(gòu)解鎖。
2 拉臂車卸載垃圾時的兩起安全事故
垃圾中轉(zhuǎn)站設(shè)置有卸料垃圾槽,通過卸料門與卸料平臺隔開,為防止拉臂車倒車卸載垃圾時后輪掉落到垃圾槽內(nèi),卸料門設(shè)置有門檻,門檻高度通常為0.35 m~0.42 m.拉臂車卸載垃圾時,倒車將后輪頂住卸料門門檻(此時拉臂車后輥輪支撐不可用),連體壓縮垃圾廂后門解鎖(電控或液壓),然后舉升油缸推動卸料體向后翻轉(zhuǎn),后門在重力作用下自動打開,垃圾在重力作用下下滑到垃圾槽內(nèi)。卸料完畢后,舉伸油缸回縮,將卸料體收回到拉臂架副梁上,鎖緊連體壓縮垃圾廂后門,開車離開垃圾中轉(zhuǎn)站,將連體壓縮垃圾廂卸在城市路邊僻靜角落的垃圾站內(nèi)。
拉臂車卸載垃圾時,如果連體壓縮廂內(nèi)垃圾壓得太實(垃圾重量與收費關(guān)聯(lián)),靠重力自動卸料時,可能有一部份垃圾與廂體粘結(jié)在一起,不能自動下落。通常司機通過倒車撞擊卸料門門檻,強力沖擊卸載與廂體粘結(jié)在一起的垃圾,正是這一原因,造成了多起嚴重的安全事故。
事故案例一,如圖4所示:司機倒車撞擊卸料門門檻,強力沖擊卸載與廂體粘結(jié)在一起的垃圾,向后撞擊十二次后,司機下車走向卸料門查看卸料情況,拉臂車突然由卸料狀態(tài)變?yōu)樾稁麪顟B(tài),連體壓縮垃圾廂滑入垃圾槽內(nèi),拉臂車重心后移越過后輪支撐點,帶動整個拉臂車沿后輪支撐點上撓,駕駛室撞在卸料門門梁上,駕駛室嚴重變型,未造成人員傷亡。

圖4 事故案例一
事故案例二(見圖5):司機倒車撞擊卸料門門檻,強力沖擊卸載與廂體粘結(jié)在一起的垃圾,向后撞擊二次后,拉臂車突然由卸料狀態(tài)變?yōu)樾稁麪顟B(tài),連體壓縮垃圾廂滑入垃圾槽內(nèi),拉臂車重心后移越過后輪支撐點,帶動整個拉臂車沿后輪支撐點上撓,駕駛室撞在卸料門門梁上,駕駛室嚴重變型,靠成駕駛員傷亡,隨后整車滑入垃圾槽內(nèi)。

圖5 事故案例二
3 拉臂車、連體壓縮垃圾廂的受力狀況分析
拉臂車倒車撞擊卸料門門檻的過程,理論上是一碰撞的過程。對拉臂車、連體壓縮垃圾廂的受力狀況進行分析時,為了對分析結(jié)果進行比較、研究,司機倒車撞擊卸料門門檻的速度vc1分別按12 km/h、15 km/h兩組數(shù)據(jù)進行分析,卸料門門檻高度h分別按0.35 m、0.40 m兩組數(shù)據(jù)來進行比較。
受力分析過程中用到的相關(guān)參數(shù)定義:
vc1為司機倒車撞擊卸料門門檻時的瞬時車速(m/s);vc2為碰撞發(fā)生后拉臂車后橋彈起的瞬時速度(m/s);m為拉臂車后橋質(zhì)量(N);m1為連體壓縮垃圾廂質(zhì)量(含卸載后粘結(jié)在廂內(nèi)垃圾的質(zhì)量)(N);M為卸載垃圾時時拉臂車分配倒后橋上的軸荷(N);r為拉臂車后橋輪胎半徑(m);h為卸料門門檻高度(m);α為碰撞后法向沖量與垂直方向夾角(°);ω1為碰撞前拉臂車后橋車輪轉(zhuǎn)動的瞬時角速度(r/s),與vc1相關(guān)聯(lián);ω2為碰撞后拉臂車車繞碰撞點轉(zhuǎn)動的瞬時角速度(r/s),與 vc2相關(guān)聯(lián)。
計算以某型號拉臂車、與之配套的連體壓縮垃圾廂的實物參數(shù)為依據(jù)。
vc1=3.333 m/s、4.167 m/s
m=8 160 N
m1=66 100 N(連體壓縮垃圾廂質(zhì)量56 100 N,計算時按廂內(nèi)粘結(jié)有10 000 N垃圾計)
M=99 660 N
r=0.533 m
h=0.35 m、0.40 m分別對應(yīng)的角度α=69.9°、73.4°
拉臂車倒車撞擊卸料門門檻的過程見圖6.
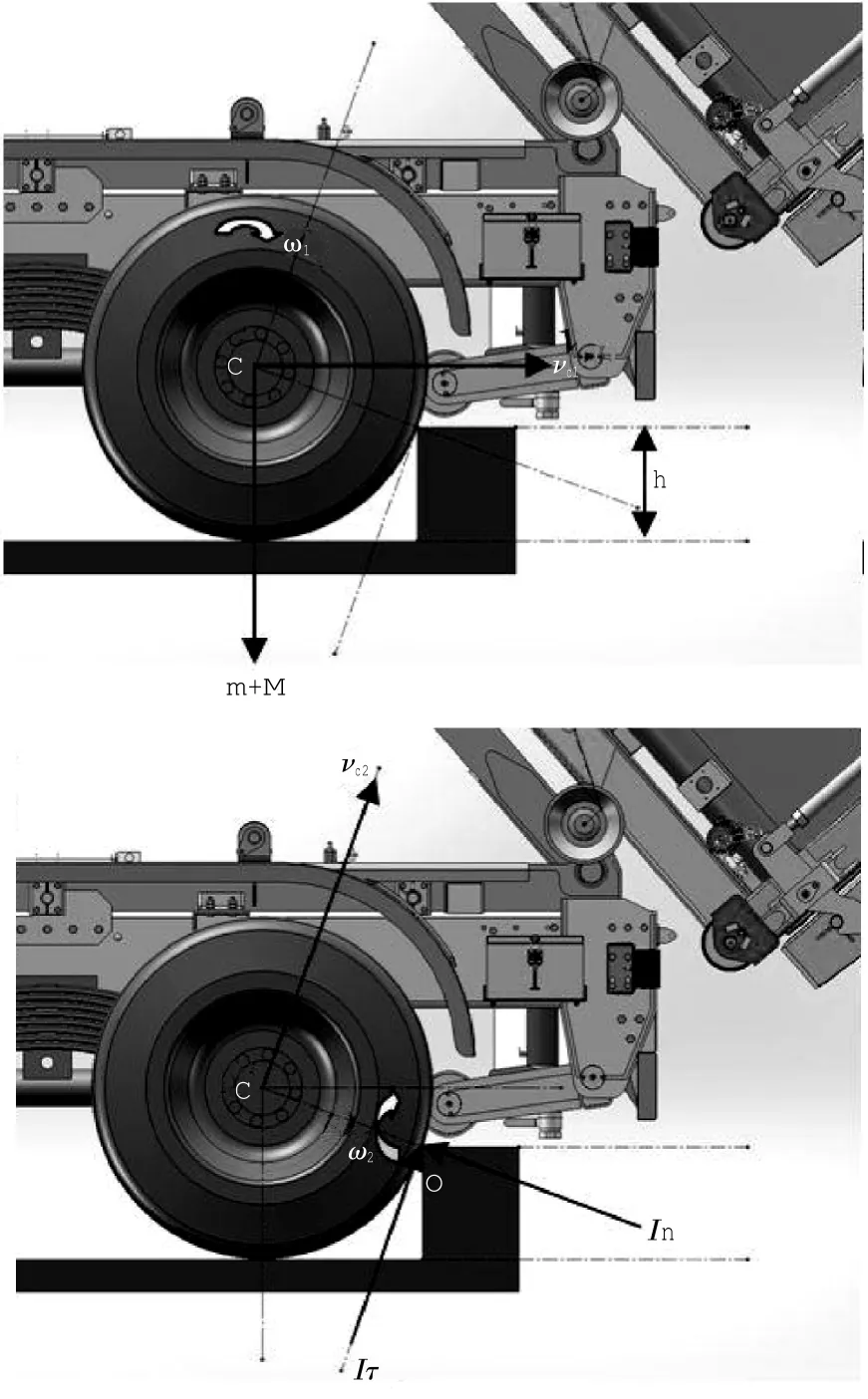
圖6 司機倒車撞擊卸料門門檻過程中拉臂車后橋的受力變化圖
拉臂車后橋不能單純簡化為圓盤與臺階的碰撞,拉臂車后橋不僅有自重m,還有卸料時整車質(zhì)量分布到后橋上的軸荷M[1].司機倒車以vc1的瞬時速度撞擊卸料門門檻,碰撞前后后橋車輪對撞擊點O的角動量守恒:
L02-L01=MO(Ie),In、Iτ通過撞擊點O,所以MO(Ie)=0,L02=L01
碰撞前:

碰撞后:
L02=JOω2,根據(jù)轉(zhuǎn)動慣量的平行移軸定理[2]JO=JC
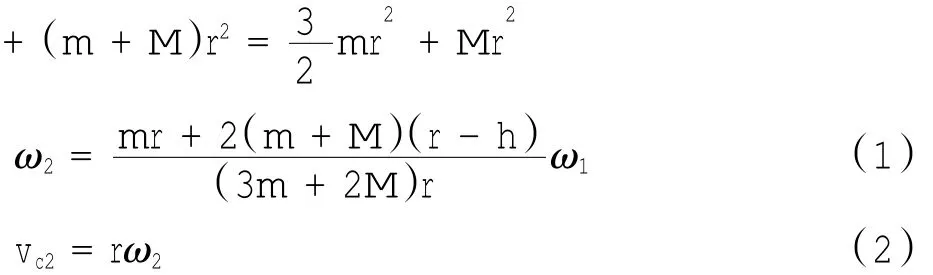
拉臂車撞擊卸料門門檻后,以ω2的角速度繞O點向上翻轉(zhuǎn),后橋中心C沿斜上方向彈起,根據(jù)動能守恒定理[2]:

其中:g是重力加速度,H是拉臂車撞擊卸料門門檻后后橋中心點C相對于轉(zhuǎn)點O彈起的高度。

根據(jù)以上條件及式(1)、(2)、(3)卸料門后門檻高度及撞擊時的矢量角α的不同,司機倒車與卸料門門檻碰撞后相關(guān)碰撞參數(shù)的計算結(jié)果見表1、表2.

表1 卸料門后門檻高度h=0.35m,矢量角α=69.9°的碰撞參數(shù)

表2 卸料門后門檻高度h=0.40m,矢量角α=73.4°的碰撞參數(shù)
根據(jù)表1、表2所列碰撞參數(shù)可以看出,卸料門門檻設(shè)置越高,碰撞后后橋彈起的高度越小,整車繞碰撞點O翻轉(zhuǎn)的角速度也越小。卸料門門檻高度的合理設(shè)置是安全設(shè)計改進要點之一。卸料門門檻高度設(shè)置不超過拉臂車后輥輪支撐提起的高度,不超過拉臂車后橋車輪半徑。
司機倒車以vc1的瞬時速度撞擊卸料門門檻后,整車以ω2的角速度向后翻轉(zhuǎn),處于卸料狀態(tài)的聯(lián)體壓縮垃圾廂也隨車彈起,連體壓縮垃圾廂“獲得”初始速度vc2(見圖7)。連體壓縮垃圾廂通過鉤環(huán)掛在拉臂架的吊鉤上,另一支撐點O1為連體壓縮垃圾廂導(dǎo)軌翼緣下表面與拉臂架導(dǎo)向輪切點,連體壓縮垃圾廂導(dǎo)軌翼緣的上斜面被廂體鎖緊機構(gòu)鎖住,正常情況下,鎖塊下表面與導(dǎo)軌翼緣的上斜面間有5 mm左右的間隙,因此,連體壓縮垃圾廂與拉臂架間屬“松散”連接。當(dāng)連體壓縮垃圾廂繼續(xù)以vc2速度“前進”時,其導(dǎo)軌翼緣的上斜面受到廂體鎖緊機構(gòu)鎖塊下表面的阻擋,兩者間的接觸點為O2(見圖7)。連體壓縮垃圾廂除了繞O1點轉(zhuǎn)動上升外,還會沿兩O1、O2兩限位點連線方向被“抽出”(圖7)。“抽出”的過程雖然受阻,但速度方向和兩點連線導(dǎo)向都有利于連體壓縮垃圾廂被“抽出”。可以簡化計算連體壓縮垃圾廂能轉(zhuǎn)動的角度和被“抽出”的高度。

圖7 拉臂車以不同倒車速度撞擊后連體壓縮垃圾廂動力變化圖
根據(jù)連體壓縮垃圾廂的結(jié)構(gòu)尺寸及重心定位測量出:β1=20.1°,β2=58.8°,連體壓縮垃圾廂在速度vc2的作用下被“抽出”的高度為H1,根據(jù)動能守恒定理:
通過H1可以算出連體壓縮垃圾廂在角速度ω3作用下旋轉(zhuǎn)的角度為β3.β3不大于O1、O2連線與連體壓縮垃圾廂導(dǎo)軌面的夾角。大于這個夾角將被O2點攔阻。
當(dāng)連體壓縮垃圾廂質(zhì)心G到達最高點H1時,在重力作用下下落,同時導(dǎo)軌翼緣下表面沿導(dǎo)向滾輪面向下滑動,直到連體壓縮垃圾廂鉤環(huán)與拉臂架吊鉤發(fā)生二次碰撞。二次碰撞是拉臂車(連體壓縮垃圾廂)卸料時發(fā)生嚴重安全事故的根本原因。
二次碰撞的沖量計算[2](見圖8):碰撞時間按t=0.001 s計。碰撞前后,連體壓縮垃圾廂對碰撞點O3的動量矩守恒。碰撞前連體壓縮垃圾廂質(zhì)心的速度為vG,繞O1轉(zhuǎn)動的角速度為ω4;碰撞后質(zhì)心的速度為 v′G,繞 O1轉(zhuǎn)動的角速度為 ω′4.

圖8 二次碰撞后連體壓縮垃圾廂動力變化圖
LO32-LO31=MO3(Ie),In、Iτ通過撞擊點O3,所以MO3(Ie)=0,LO32=LO31
碰撞前:

其中:JG為連體壓縮垃圾廂對重心G的轉(zhuǎn)動慣
連體壓縮垃圾廂結(jié)構(gòu)復(fù)雜,其轉(zhuǎn)動慣量的計算需要將其按零件分算,然后按平行移動定理換算到其質(zhì)心軸上,或是通過實驗方法找到其重心位置及轉(zhuǎn)動慣量。實驗或計算過程太復(fù)雜,也沒有必要。通過稱重已知連體壓縮垃圾廂質(zhì)量,這里將連體壓縮垃圾廂簡化為一個均質(zhì)的長方體,從而可以算出連體壓縮廂的轉(zhuǎn)動慣量。連體壓縮垃圾廂質(zhì)量(含卸載后粘結(jié)在廂內(nèi)垃圾的質(zhì)量)m1=66 100 N,根據(jù)實際情況,將連體壓縮垃圾廂簡化為長寬高分別為4 190 mm×2 100 mm×2 130 mm均質(zhì)的長方體,連體壓縮垃圾廂轉(zhuǎn)動慣量JG:
JG=其中l(wèi)為簡化后均質(zhì)長方體長,h為簡化后均質(zhì)長方體高。
簡化計算結(jié)果:JG=121 695 N·m2
碰撞后:
LO32=JO3ω′4
根據(jù)轉(zhuǎn)動慣量的平行移軸定理:連體壓縮垃圾廂相對于碰撞點O3的轉(zhuǎn)動慣量為:
JO3=JG+m1e2,其中軸距e可以通過連體壓縮垃圾廂結(jié)構(gòu)測得:

根據(jù)沖量定理的平面運動微分方程的積分形式:

其中:v′G=e1ω4′,軸距 e1可以通過連體壓縮垃圾廂結(jié)構(gòu)測得。
二次碰撞沖量:

實際碰撞過程中,在碰撞時間t內(nèi)連體壓縮垃圾廂鉤環(huán)受力成近似拋物線變化,不考慮碰撞極小時間內(nèi)剛體受力的變化,這里計算碰撞時間t內(nèi)連體壓縮垃圾廂鉤環(huán)受力的平均值F.

通過連體壓縮垃圾廂結(jié)構(gòu)尺寸測得:e=2.916 m,e1=2.840 m.
根據(jù)卸料門門檻高度不同,h=0.35 m,0.40 m,分別對應(yīng)的角度:β4=35.75°,28.73°,β5=34.77°,41.81°,β6=23.81°,30.84°,β7=10.97°
根據(jù)式(4)、(5)、(6)、(7)、(8)、(9)、(10)計算結(jié)果見表3.
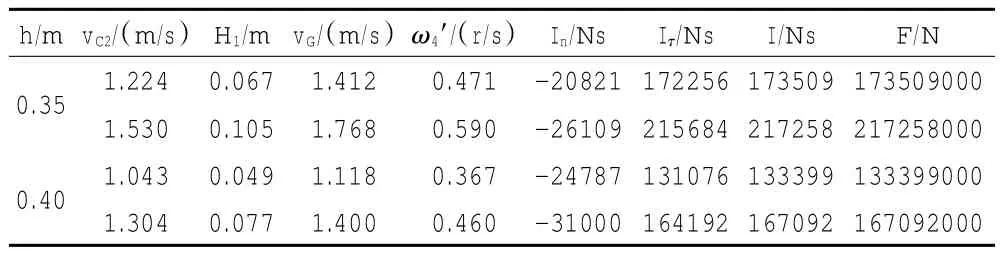
表3 連體壓縮垃圾廂二次碰撞后的相關(guān)參數(shù)計算結(jié)果
根據(jù)作用力與反作用力的關(guān)系,碰撞后連體壓縮垃圾廂通過鉤環(huán)對拉臂架的瞬時沖擊力為F巨大,沖擊力F持續(xù)時間很短,產(chǎn)生的破壞力沒有顯現(xiàn)出來。沖擊力F通過伸縮臂/連接臂對鉸支點產(chǎn)生的力矩迫使舉升油缸活塞桿產(chǎn)生瞬時靜推力F1(見圖9)來平衡,通過伸縮臂/連接臂的受力分析可以得到F1=3.7F,F(xiàn)1的反作用力迫使舉升油缸液壓油被壓縮(壓縮量與液壓油的壓縮率(體積模量)、液壓油中溶入空氣量及環(huán)境溫度有關(guān)),活塞桿被壓縮一小段行程,伸縮臂/連接臂繞鉸支點轉(zhuǎn)過一個小的角度,與此同時,瞬時沖擊力為F對鉸支點產(chǎn)生的力矩被傳遞給連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu),鎖緊機構(gòu)產(chǎn)生一個瞬時靜推力F2來平衡。

圖9 二次碰撞后舉升油缸產(chǎn)生的瞬時靜推力圖
對機械插鎖式鎖緊機構(gòu),瞬時靜推力F2是通過方塊插鎖與方孔插板間的擠壓而產(chǎn)生的(見圖3),推力F2在司機多次倒車撞擊卸料門門檻時多次形成,使方塊插鎖與方孔插板間相互擠壓并產(chǎn)生變形,鎖緊機構(gòu)變得不可靠,最嚴重的情況是變形后鎖緊機構(gòu)失效。為防止鎖緊機構(gòu)發(fā)生較大變形,機械插鎖式鎖緊機構(gòu)應(yīng)增加方塊插鎖和方孔插板的板厚,改用屈服強度更高,耐磨性能更好的材料制造。
對液壓鉤鎖式鎖緊機構(gòu),由于鎖鉤固定在連接臂上,瞬時沖擊力為F通過活動力矩軸直接傳遞到鎖緊油缸上,迫使鎖緊油缸活塞桿產(chǎn)生一個瞬時靜推力F2來平衡(見圖10),F(xiàn)2的反作用力使鎖緊油缸解鎖的趨勢發(fā)展。推力F2在司機多次倒車撞擊卸料門門檻時多次形成,造成兩種破壞可能。一種情況是:由于鎖緊油缸缸徑小,其壓縮框形成的油壓超過設(shè)計值,造成鎖緊油缸密封件被破壞,液壓油泄漏,鎖緊機構(gòu)解鎖,整車由卸料狀態(tài)變?yōu)樾稁麪顟B(tài);另一種情況是:鎖鉤繞連接臂固定軸轉(zhuǎn)過一個小角度后,液壓鉤鎖式鎖緊機構(gòu)往解鎖的趨勢發(fā)展,同時伸縮臂/連接臂與翻轉(zhuǎn)臂間轉(zhuǎn)過一個小角度,當(dāng)瞬時沖擊力F解除后,在連體壓縮垃圾廂及拉臂架重力作用下,這個小角度并沒有恢復(fù)到0°。司機倒車多次撞擊卸料門門檻后,這個小角度累積的結(jié)果使液壓鉤鎖式鎖緊機構(gòu)脫鉤解鎖,整車由卸料狀態(tài)變?yōu)樾稁麪顟B(tài),從而造成嚴重后果。事故案例一就是在這種情況下發(fā)生的。
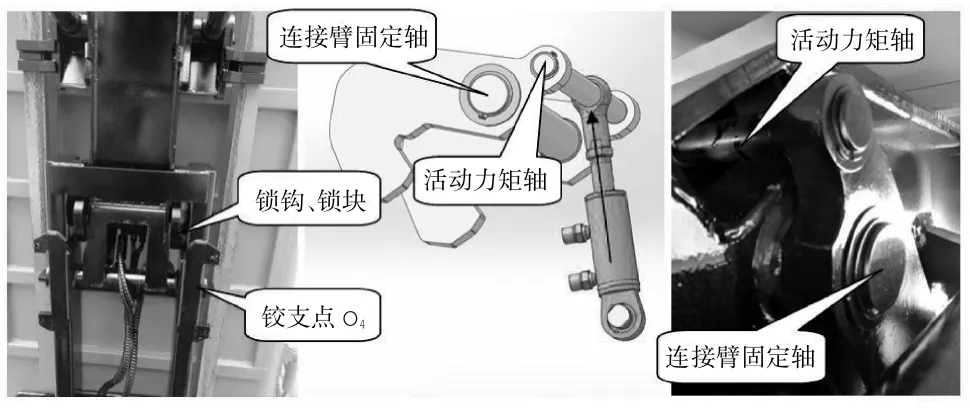
圖10 二次碰撞后液壓鉤鎖式連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)動力變化圖
通過以上分析、計算、研究的結(jié)果可以看出,司機通過倒車撞擊卸料門門檻通強力卸載粘結(jié)于連體壓縮垃圾廂內(nèi)垃圾時,可以造成拉臂車由卸料狀態(tài)轉(zhuǎn)為卸廂狀態(tài)。當(dāng)拉臂車突然從卸料狀態(tài)轉(zhuǎn)為卸廂狀態(tài)時,翻轉(zhuǎn)臂上的廂體鎖緊機構(gòu)還處于鎖緊狀態(tài),在連體壓縮垃圾廂重力作用下伸縮臂/連接臂將繞轉(zhuǎn)點翻轉(zhuǎn),給廂體鎖緊機構(gòu)產(chǎn)生巨大的推力,這個推力之大,足已使伸縮臂變形或迫使伸縮臂與連接臂間的導(dǎo)向塊變形(見圖11)。連體壓縮垃圾廂吊掛在伸縮臂吊鉤上,其導(dǎo)軌沿翻轉(zhuǎn)臂導(dǎo)向輪下滑過程中,左右兩邊并不平衡,導(dǎo)軌翼緣外邊緣強力壓迫廂體鎖緊機構(gòu)一邊鎖塊的內(nèi)側(cè)邊,推動廂體鎖緊機構(gòu)一邊解鎖,廂體繼續(xù)滑落,完成卸廂過程,直至掉入卸料槽坑內(nèi),同時帶動整車繞后車輪上翹,導(dǎo)致駕駛室與卸料門上橫梁碰撞,碰撞的結(jié)果大多是駕駛室嚴重變形,如果此時司機在駕駛室內(nèi),將造成嚴重的人員傷亡事故。

圖11 卸料時連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)解鎖后伸縮臂、廂體鎖緊機構(gòu)變化圖
4 拉臂車安全設(shè)計改進要點及改進措施
拉臂車在后輥輪支撐收起高度允許的情況下,增加垃圾中轉(zhuǎn)站卸料門門檻高度,門檻高度越高(不大于拉臂車后橋車輪半徑),司機倒車撞擊卸料門門檻后,整車彈起的高度越小,連體壓縮垃圾廂二次碰撞后的沖擊力也越小。
連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)的安全可靠性是拉臂車安全設(shè)計的重要要點。以吉馬拉臂架為例,其連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)經(jīng)歷了三代改進(見圖12),最初的鎖緊機構(gòu)為彈簧鉤鎖式,兩邊鎖鉤固定在轉(zhuǎn)軸兩端,通過分布于連接臂兩邊的力矩軸和彈簧與移動軸連接,移動軸兩端位于連接臂兩邊的U型槽內(nèi),在伸縮臂回縮時,伸縮臂尾端推動移動軸在U型槽內(nèi)向后移動,同時通過力矩軸帶動鎖鉤向上翻轉(zhuǎn),連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)解鎖;當(dāng)伸縮臂外伸時,其尾端離開移動軸,移動軸在彈簧力作用下回位,并通過力矩軸帶動鎖鉤向下翻轉(zhuǎn),鉤住位于翻轉(zhuǎn)臂上的鎖塊,連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)上鎖。彈簧鉤鎖式鎖緊機構(gòu)安全可靠性差,司機倒車撞擊卸料門門檻時,在瞬時沖擊力F的作用下,兩邊彈簧很容易被拉伸,造成鎖緊機構(gòu)解鎖,拉臂車由卸料狀態(tài)變?yōu)樾稁麪顟B(tài),造成安全事故。因此多年前吉馬就因其易造成事故而改進到第二代的側(cè)邊液壓鉤鎖式,后又進一步改進為中間液壓鉤鎖式(見圖12)。
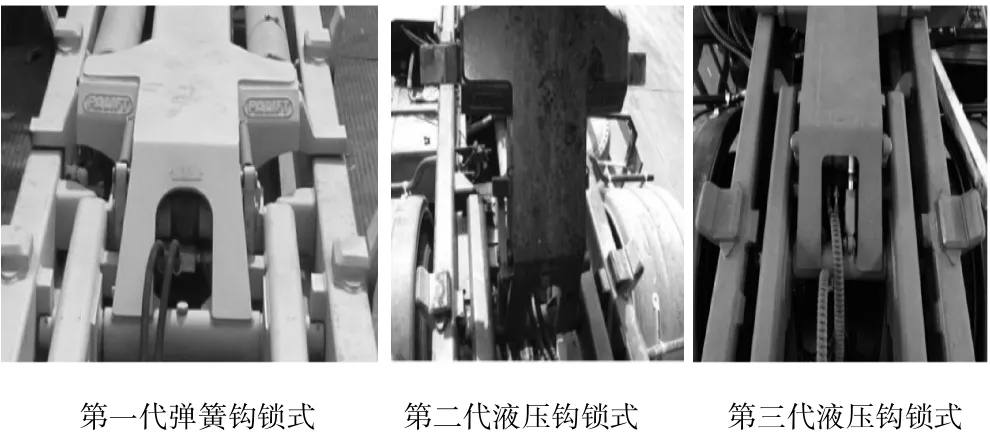
圖12 吉馬拉臂架連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)的三次改進圖
通過以上計算、分析可以看出,液壓鉤鎖式鎖緊機構(gòu)在瞬時沖擊力F的作用下可以造成鎖緊機構(gòu)解鎖,使拉臂車由卸料狀態(tài)轉(zhuǎn)為卸廂狀態(tài),從而造成安全事故。從瞬時靜推力F2形成的原因和方向來看,液壓鉤鎖式連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)應(yīng)改變鎖緊方向,改鉤鎖式為橫向插鎖式,通過液壓油缸將兩鎖塊插入翻轉(zhuǎn)臂兩邊梁內(nèi),使其鎖緊狀態(tài)不受瞬時沖擊力F的影響,拉臂車卸料時將連接臂/翻轉(zhuǎn)臂/連體壓縮垃圾廂鎖緊為安全可靠的卸料體。
廂體鎖緊機構(gòu)的安全可靠性是拉臂車安全設(shè)計的另一重要要點。廂體鎖緊機構(gòu)鎖的鎖緊狀況與拉臂車安全卸料直接相關(guān),忘記廂體鎖緊機構(gòu)上鎖或鎖緊不倒位,司機正常情況下倒車卸料時,在連體壓縮垃圾廂的重力作用下,廂體就會在拉臂架吊鉤鉤掛下擺動。司機倒車撞擊卸料門門檻時,連體壓縮垃圾廂產(chǎn)生大幅度的跳動,跳動的方向甚至有可能使廂體鉤環(huán)脫鉤,引起嚴重的安全事故。事故案例二就是在這種情況下發(fā)生的。從事故案例發(fā)生的原因來看,增加廂體鎖緊機構(gòu)鎖緊狀況檢測裝置,使之與卸載垃圾時舉升油缸動作互鎖,只要廂體鎖緊機構(gòu)沒有正常鎖緊倒位,舉升油缸就不能動作,避免此類事故的發(fā)生。
拉臂車在垃圾中轉(zhuǎn)站正常卸載時,如果能用安全的方法卸載粘結(jié)在連體壓縮垃圾廂中的垃圾,避免司機通過撞擊卸料門門檻的方式來卸載,那么卸料時發(fā)生安全事故的情況就會大大減少。事實上,很多城市管理者已經(jīng)在這一問題上采取了很多措施,如在卸料門門眉上增設(shè)橫梁阻擋連體壓縮垃圾廂的過度翻轉(zhuǎn),從而阻止拉臂車駕駛室上翹撞上門眉;卸料時在駕駛室前方設(shè)置安全掛鉤,通過駕駛室前方拖鉤將拉臂車前橋鉤掛在地面上,防止駕駛室向上翻轉(zhuǎn)。這些措施雖然都是被動的安全措施,但這些措施設(shè)置后,發(fā)生安全事故的情況已大為減少。可是連體壓縮垃圾廂內(nèi)粘結(jié)的垃圾也沒辦法卸載,不得不帶回,所以在經(jīng)濟利益的驅(qū)動下,操作人員時有違規(guī)操作,因此安全事故任時有發(fā)生。
解決這一問題的根本方法是在司機不下車的情況下,能使連體壓縮垃圾廂內(nèi)的推鏟動作,從而推動粘結(jié)在連體壓縮垃圾廂內(nèi)的剩余垃圾卸載。現(xiàn)在有些垃圾中轉(zhuǎn)中在卸料門處增設(shè)380 V電源,通過給連體壓縮垃圾廂控制系統(tǒng)通電,推動推鏟卸載粘結(jié)于廂內(nèi)的剩余垃圾。由于接插380 V電源很不方便,而且存在高壓的不安全因素,司機為了省事,還是利用撞擊卸料門門檻的方式來解決。如果在拉臂車、連體壓縮垃圾廂設(shè)計時考慮卸載垃圾的問題,在沒有外接電源的情況下(如在垃圾填埋場),能使連體壓縮垃圾廂內(nèi)的推鏟動作,問題就能得到根本解決。圖14是通過底盤動力推動連體壓縮垃圾廂內(nèi)的推鏟動作的一種解決方案,拉臂車卸料時,通過液壓快換接頭及油路切換球閥將底盤動力引入到連體壓縮垃圾廂推鏟油缸油路上。
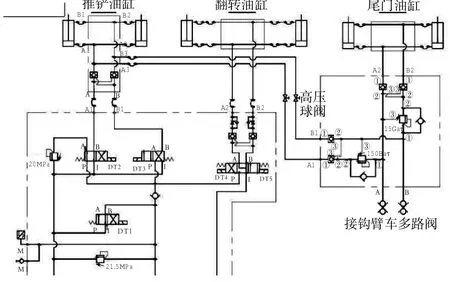
圖14 卸料時將底盤動力引入連體壓縮垃圾廂推鏟油缸油路的液壓原理圖
5 結(jié)論
(1)司機倒車撞擊垃圾中轉(zhuǎn)站卸料門門檻卸載粘結(jié)于連體壓縮垃圾廂內(nèi)的垃圾時,引起連體壓縮垃圾廂鉤環(huán)與拉臂架吊鉤間的二次碰撞,二次碰撞可以造成拉臂車由卸料狀態(tài)轉(zhuǎn)為卸廂狀態(tài),引發(fā)嚴重的人員傷亡事故。連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)的安全可靠性與拉臂車由卸料狀態(tài)轉(zhuǎn)為卸廂狀態(tài)直接相關(guān),彈簧鉤鎖式鎖緊機構(gòu)安全可靠性最差,機構(gòu)插鎖式鎖緊機構(gòu)比液壓鉤鎖式鎖緊機構(gòu)安全可靠性高。
(2)連接臂/翻轉(zhuǎn)臂鎖緊機構(gòu)的安全可靠性設(shè)計,廂體鎖緊機構(gòu)的鎖緊狀態(tài)檢測與舉升油缸動作互鎖的設(shè)計,拉臂車卸載垃圾時,將底盤動力引入連體壓縮垃圾廂推鏟油缸油路的設(shè)計,是現(xiàn)有拉臂車安全設(shè)計需要重點改善的三個要點。
(3)采用安全的方法卸載粘結(jié)在連體壓縮垃圾廂中的垃圾,可以從根本上解決拉臂車卸載垃圾時引發(fā)安全事故的問題。通過液壓快換接頭及油路切換球閥將底盤動力引入到連體壓縮垃圾廂推鏟油缸油路上是解決這一問題的有效方法。
[1]賈常明.汽車輪胎沖上臺階力學(xué)過程分析[J].中國刑警學(xué)院學(xué)報,2012(3):30-32.
[2]王 鐸,程 靳,孫 毅.理論力學(xué)(Ⅱ)[M].北京:高等教育出版社,2009:136-153.
