基于CFD實尺2 339標準箱集裝箱船的阻力分析和實船驗證
2018-06-27 05:39:00邵漢東楊富茗田曉慶賴祥華
船舶 2018年3期
關鍵詞:船舶
邵漢東 楊富茗 田曉慶 賴祥華
(1.揚帆集團股份有限公司 舟山316100 ;2.哈爾濱工業大學 機電工程學院 哈爾濱150001;3.杭州電子科技大學 海洋工程研究所 杭州310018)
引 言
隨著計算機技術不斷進步,CFD技術日趨完善,基于CFD阻力分析技術已日益廣泛應用于工程領域,上海交通大學倪崇本等人[1]基于黏性流理論對疊模求解,提出了基于CFD理論計算進行實船阻力預報新方法;哈爾濱工程大學王詩洋[2]對一條模型尺度船模進行阻力分析,通過對比、驗證CFD技術在船舶阻力預報中的合理性和有效性;武漢理工大學張恒等人[3]以KCS船型為研究對象,運用全尺度CFD方法研究不同航速下的阻力,并對尾部流場進行分析;哈爾濱工程大學郭春雨等人[4]對4艘肥大型船舶阻力進行計算、比較和分析,得出阻力修正的方法,基于計算流體力學CFD數值模擬,由于其成本低、靈活性等特點,已逐漸成為船舶航速預報和線型優化的主要手段。
本文將研究項目船(2 339標準箱集裝箱船)在試航壓載狀態下不同航速時的阻力預報,分析CFD阻力預報的計算條件以及計算結果;而后,將CFD數值模擬結果同實船試航修正阻力進行比較和分析,以證實兩者趨勢一致且誤差可控。
1 船型及線型概況
本集裝箱船由柴油機驅動,為無限航區全格柵型集裝箱船,單槳、單層甲板、球型首尾,并設首尾樓以及克令吊。該船主尺度參數見表1。

表1 2 339集裝箱船主尺度m
本船球首采用V型設計,船尾則采用V-U結合方式設計。首部設計水線8.5 m以上外飄較大,最大橫剖面設置在船舯。設計水線首端形狀采用微凹形,因凹形設計可以削瘦首部船形,從而減小沿船長方向水壓力分量,進而減小整個船舶的阻力。為避免前肩波波系干擾和去流段嚴重漩渦,對最短進流段長度和去流段長度進行處理:使進流段長度占比30.7%,去流段長度占比19.4%。本船設計吃水時的考核航速為19 kn,Fn為0. 2~ 0.25。橫剖面面積曲線前端為凹形,后端為微凹形,浮心位置在舯前2.249%LPP處。舯前較豐滿,以減少粘壓阻力。后體設計成球尾線型,不僅有利于伴流均勻,也使螺旋槳具有更高的推進效率和更低的激振力。本船線型概況見圖1。
2 基于CFD的船舶阻力數值預報
2.1 實體模型及流體計算域
本船線型由船舶性能計算軟件NAPA設計與導出,通過三維設計軟件RHINO進行實體建模并在三維軟件UG中作局部修補,修補后的實體模型參見圖2。
計算域的尺寸設置如下:流向方向取5L,側向方向取1.5L,法向方向取2L(L為船舶總長)。由于船舶左右對稱、流動對稱,為節約計算資源,計算時取整個流域的一半。
2.2 流體域網格劃分
網格劃分在CFD計算中具有舉足輕重的地位,將直接影響模擬結果的準確精度和效率。過密的網格浪費計算機計算資源,計算難以收斂;而過疏的網格會使計算精度急驟下降。因此,掌握網格的數量和精度對計算結果的精確度影響很大。
本船的網格劃分采用NUMECA/HEXPRESS全六面體非結構網格,具體按照由體到面的網格生成技術以及八叉樹網格拆分方法,將物面附近網格細化并投影至物面,從而形成貼體網格[5]。
本船網格總數約167萬。為更好地捕捉流動特征,在自由液面及首尾線型復雜處進行網格和邊界層的加密,第一層網格厚度根據Y+確定(Y+為300)[6],網格厚度為2.83 mm。經網格質量檢查,凹體網格為0、扭曲網格為0、負網格為0、網格最小正交角28.9°、最大正交角90°、最大斜度0.792。
為檢驗所設置網格對計算結果的影響,依次將計算網格數設置為85萬和296萬,計算得出當船速為17 kn時,船舶的阻力依次為396 kN和650 kN。經與實船的測量結果對比,最終決定選用總數為167萬的網格。圖3為計算域的網格劃分圖。
2.3 邊界及初始條件
數值模擬計算求解采用多相流穩態計算模型,邊界條件設置為:船體表面引入標準壁面函數,側向邊界設置為對稱邊界,入口邊界給定為速度入口,出口邊界給定為壓力邊界。
湍流模型為 K-Omega(SST)-Menter模型,計算中所選取的最大時間步數為2 000,時間步值Δt= 0.01Lref/ Vref。式中:Lref為參考船長189 m;Vref為所對應的參考速度,m/s。時間步法則主要包括時間步均勻法則、線性法則、正弦法則等,本文采用時間步均勻法則進行計算。
文中通過CFD計算模擬吃水:實船壓載狀態吃水為首吃水4.53 m,尾吃水7.31 m。為嚴格符合實際, CFD計算時,首尾吃水與實船壓載狀態吃水保持一致。
3 CFD計算結果分析
3.1 典型航速自由液面處波形顯示
通過建立實尺數值模擬計算域,對航行中的目標船繞流流場進行數值模擬,經CFView生成流場計算信息。CFD模擬壓載工況下的自由液面處波形圖見下頁圖4。由圖4觀察到,船舶行進時,水流流經有曲率的船體表面時,因船體表面壓強各處分布不均,在重力和慣性力作用下,船體周圍便產生船行波,船首和船尾會形成各自的船行波,在航速為19 kn和20 kn的云圖中尤為明顯。此外,船行波在首柱稍后處始于波峰,在尾柱之后始于波峰,并且船行波的高度正比于船速。隨著航速的增加,船行波明顯變高且波峰后移。船首和船尾兩個駐點附近為線型突變區,壓強和興波最大[7]。
3.2 典型航速舷側波形顯示
圖5為CFD模擬在壓載工況下的舷側波形圖。由該圖可見,產生首尾波峰的位置長度比垂線間長略長。
3.3 典型航速船體壓力分布
圖6為航速20 kn時,CFD模擬的壓載工況,水壓力在外板的分布圖。
從圖6可見,船首和船尾兩個駐點附近為線型變化突變區,此區域的海水壓力及壓力變化均較大。
3.4 典型航速水質點切應力及流向矢量
圖7為航速20 kn時,CFD模擬的壓載工況,水質點所受切應力及流向矢量圖。
當球首前端面迎浪時,水質點在前進方向被球首堵住,被堵區域水質點的剪切力最大,即摩擦阻力最大,瞬時流速趨于0,動能轉化為位能,水面升高。由于水質點運動慣性作用,因此最高水位存在滯后現象。
尾部由于船舶線型變化顯著,造成邊界層分離,水質點不再按給定的方向流動,軸出口處還出現逆向流動趨勢,并且此區域水質點所受剪應力減小,相應的流速減小,因此會在此區域形成渦流區并導致阻力增加。
4 航速驗證
4.1 船模試驗
船模試驗在德國漢堡HSVA水池進行,船池尺寸:300 m(長)×18 m(寬)×6 m(深)。壓載工況下,首吃水為4.5 m、尾吃水為7.3 m、縮尺比為26.105 2。典型航速下的阻力試驗圖見圖8。
4.2 實船航速驗證
本船實船試航在壓載狀態(船首吃水4.53 m,船尾吃水 7.31 m)東經 123°31′,北緯 29°16′的東海海面進行,邀請DNV-GL船級社和武漢理工大學的兩家測速機構進行測速,測試項目主要包含不同工況下對地航速測試、主機功率、主機轉速、相對風速、相對風向、涌波高、周期等。其中對航速、功率、風速風向按每秒采集;對試驗海域的涌和波的高度、周期、波長采用浮球加速度測波儀測量并記錄;對試驗區空氣、海水比重、溫度、氣壓及水深等也同時進行相應測量并記錄。
試驗后的航速修正,需要修正至無風無浪的理想狀態,并與CFD計算模擬結果進行比較。DNV-GL船級社的航速修正基于ITTC法,在荷蘭MARIN水池開發的STAIMO系統中完成。 測速公司修正后的功率與航速曲線,作為實船螺旋槳效率、航速和功率換算依據,并參考以下相應航速的船模試驗結果換算公式:
式中:Pe為有效功率,kW;Pd為螺旋槳收到功率,kw;Etad為螺旋槳效率,kW。
式中:Rt為船體阻力,N;Vs為船舶航速,kn。
根據以上公式便可計算出航行試驗壓載下的阻力值,參見表2。
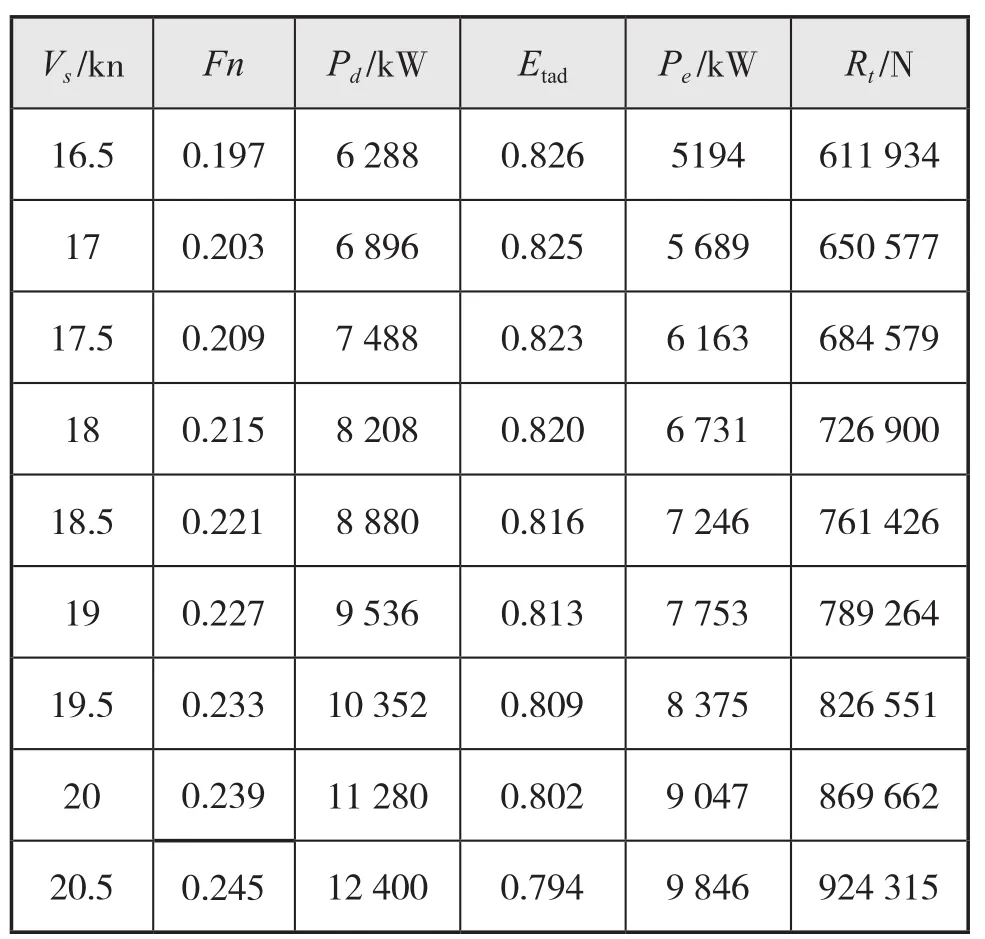
表2 壓載吃水工況下的實船試航阻力值
5 計算結果阻力誤差分析
在實際航行中,空氣阻力是客觀存在的。在CFD分析中,為簡化復雜的CFD計算,主甲板以上的空氣阻力未予考慮。根據船舶設計手冊中關于對空氣阻力的描述,其相對船體阻力占比較小(約為總阻力的2%~4%)[8]。為更符合客觀事實,本文壓載工況下的CFD模擬阻力考慮了2%風阻。圖9和圖10為CFD計算模擬阻力、實船試航修正阻力以及兩者的相對誤差。
結果表明:
(1)CFD模擬阻力與實際試航阻力的相對誤差率為-1.69% ~ -0.015%。在船速為17.5 kn時,相對誤差最小為-0.015%;船速為20.5 kn時,相對誤差最大為-1.69%。可見當船速大于17.5 kn時,隨著航速的持續增加,船舶阻力也持續增強。
(2)CFD模擬阻力與試航修正阻力曲線變化趨勢基本一致,并且在中、低速段,CFD模擬阻力與實船試驗阻力吻合度較好,驗證了CFD在船舶阻力計算中具有一定的通用性和指導意義。
(3)實船試航修正阻力與CFD計算阻力方面,隨著航速增加,誤差明顯偏大,其主要原因在于風阻并非恒定,它隨著航速增加而增加,但在整個速度段的變化趨勢基本保持一致。
(4)造成CFD阻力誤差的原因還有試航時壓載吃水誤差、制造誤差和肉視識讀誤差;此外,螺旋槳、舵、首側推等相關附體也會引起阻力變化。
6 結 論
經最后航速修正,本船試航航速達到設計要求,順利完成低阻線型的開發,而其中的關鍵在于CFD技術在線型設計、優化以及航速預報方面的應用。
以上僅是CFD技術在工程設計應用的典型示例。隨著CFD研發技術的不斷深入,特別是對于風阻和附件阻力處理技術的日趨完善,其預報誤差必將越來越小,在船舶設計中對于降低EEDI能效指數和降本增效將起到更大的作用。
[1] 倪崇本,朱仁傳,繆國平,等. 一種基于CFD總阻力預報方法[J]. 水動力學研究與進展,2010(5):579-586.
[2] 王詩洋,王超,常欣,等. CFD技術在船舶阻力性能預報中的應用[J]. 武漢理工大學學報,2010(21):77-80.
[3] 張恒,詹成勝. 基于CFD的船舶阻力尺度效應研究[J]. 武漢理工大學學報,2015(4):329-332.
[4] 郭春雨,黃超,鄧銳,等. 肥大型船舶阻力計算方法修正 [J]. 船海工程,2014(3):1-5.
[5] 郭然,賈力平,樊小莉,等. NUMECA系列教程 [M].北京:機械工業出版社,2013:8.
[6] 王福軍. 計算流體力學分析——CFD軟件原理與應用[M]. 北京: 清華大學出版社, 2011:113-121.
[7] 朱仁慶,楊松林,王志東.船舶流體力學[M]. 北京:國防工業出版社,2015:215-216.
[8] 中國船舶工業集團公司.船舶設計實用手冊[M]. 3版.北京:國防工業出版社,2013:272.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
