基于滑模速度控制器的永磁同步電機矢量控制系統性能研究
2018-06-28 02:23:20張蘇英王躍龍劉慧賢李明召
機電信息 2018年18期
張蘇英 孟 月 王躍龍 劉慧賢 李明召
(河北科技大學,河北石家莊050000)
0 引言
永磁同步電機(PMSM)具有動態性能好、尺寸小、效率高等優點,因而被廣泛應用于國防、農業和日常生活中[1-2]。PMSM又是一個多變量、非線性和高耦合系統,如何對其速度進行更好的控制,就成為一個關鍵問題。
傳統的速度環PI控制存在速度超調且抗擾動性能差的缺陷,對此很多學者提出了自己的研究方法:第一種方法是應用FOC控制技術建立PMSM速度、電流雙閉環解耦控制,能夠降低系統的超調量,縮短響應時間[1];第二種方法是變速積分PID控制,但響應速度較慢,抗干擾能力較弱[2];第三種方法是基于RBF神經網絡的速度PI-IP控制,能夠減小速度超調、抑制擾動,但優化時間過長[3]。所以,研究如何更好地解決PMSM速度超調、抗擾動性能差等問題非常必要。
本文提出基于滑模變結構的速度環控制器,設計滑模面及切換函數。對系統進行建模和仿真分析,分析速度響應曲線,驗證此控制策略的可行性。
1 永磁同步電機數學模型
為了便于分析,常做如下假設:(1)定子繞組三相對稱,氣隙均勻,忽略末端效應;(2)忽略磁飽和和鐵損,磁路呈線性;(3)轉換器提供理想的三相電源,忽略高次諧波;(4)忽略轉子軸的摩擦。
在運動d-q坐標系下,定子電壓方程為:

電磁轉矩方程為:

電機運動方程為:

式中,ud,uq為定子電壓的d-q軸分量;id,iq為定子電流的d-q軸分量;Rs為三相繞組電阻;ωr為電角速度;Ld,Lq為電感的d-q軸分量;Ψfr為永磁體在定子上產生的耦合磁鏈;Te為電磁轉矩;Tl為負載轉矩;Pn,J,B分別為電機極對數、轉子慣量、粘滯摩擦系數。
2 滑模速度控制器設計
滑模變結構控制具有不連續性,即系統結構隨時間變化的開關特性。滑模面一般是固定的,且與系統的參數和擾動關系較小,魯棒性較好[4]。
令狀態量x1表示速度誤差,x2=x˙1表示調節器輸入,u=iqref表示調節器輸出,綜合上述方程,可得系統數學模型:
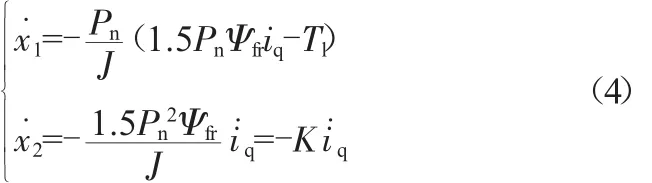
得到系統狀態空間方程:

在考慮系統轉速受限的情況下,取滑模切換函數為:s=kx1+x2。令滑模變結構調節器的輸出為:

根據滑模運動的可達性條件ss˙<0,可以得到滑模變結構調節器參數為:

3 永磁同步電機仿真
3.1 PMSM滑模速度控制系統框圖
用滑模速度控制器代替傳統的PI控制器,來滿足電機控制性能的需要。PMSM滑模速度控制系統框圖如圖1所示。
3.2 基于滑模速度控制器的永磁同步電機矢量控制仿真模型
永磁同步電機和逆變器模型直接用Simulink里面SimPowerSystems的零件庫模型。使用id=0控制方法,通過滑模速度控制器控制dq軸轉速。基于滑模速度控制器的永磁同步電機矢量控制仿真模型如圖2所示。

圖1 PMSM滑模速度控制系統框圖
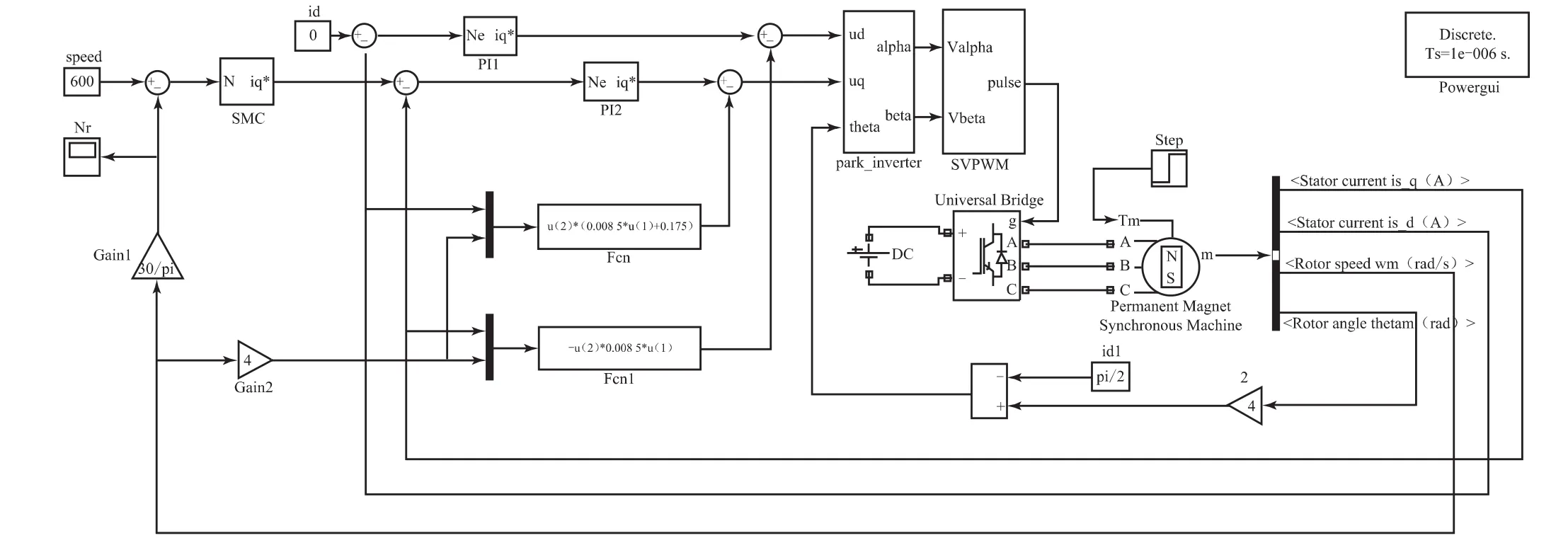
圖2 基于滑模速度控制器的永磁同步電機矢量控制仿真模型
4 仿真結果
根據上面提出的滑模速度控制器仿真框圖,建立滑模速度控制器仿真模型,運行于Matlab。總模擬時間為t=0.4 s,參考轉速為正反向600 r/min,初始時刻負載轉矩為Tl=0 N·m,0.2 s時負載轉矩Tl=10 N·m,仿真結果波形如圖3、圖4所示。

圖3 滑模控制和PI控制正轉對比圖

圖4 滑模控制和PI控制反轉對比圖
由仿真結果可以看出,電機無論正轉還是反轉,轉矩突然增加時,滑模變結構速度控制器明顯比普通的PI控制超調量要小,且具有較快的動態速度響應;在突加負載轉矩時,滑模變結構速度控制器速度波動較小。
5 結語
本文針對基于滑模速度控制器的永磁同步電機控制,對PMSM的正反轉特性進行了仿真研究。結果表明,采用滑模變結構速度控制器時,系統速度超調較小,且抗擾動性能較強,證明滑模速度控制器是一個很好的控制算法,為實際PMSM速度控制性能的研究奠定了基礎。
[1]陳娜,馮勇,史宏宇.基于FOC的永磁同步電機速度控制器參數優化設計[J].伺服控制,2011(8):29-32.
[2]楊明亮,劉軍,兗濤,等.永磁同步電機變速積分PID調速控制[J].信息技術,2015,39(4):19-22.
[3]周佳,盧少武,周鳳星.基于RBF神經網絡的永磁同步電機速度PI-IP控制[J].組合機床與自動化加工技術,2017(1):116-118.
[4]ZHANG B T,PI Y G.Enhanced sliding-mode control for permanent magnet synchronous motor servo drive[C]//Proceedings of the 2011 Chinese Control and Decision Conference(CCDC),2011:122-126.
