關于焊接變位機急需標準化及產業化的探討
2018-06-28 02:23:46朱影
機電信息 2018年18期
關鍵詞:標準化
朱 影
(廣州數控設備有限公司,廣東廣州510530)
0 引言
隨著國家智能制造的迅速發展,高強度、高密度及高危的勞動力產業逐漸被自動化操作所取代,焊接作為典型的高強度高危行業迫切需要得到改善。而焊接變位機作為焊接自動化的常用元素之一,特別是在國內機器人快速產業化的背景下,也急需實現標準化與產業化,從而提高焊接生產的效率,降低人力成本,獲得更加優異的焊縫質量。
本文主要簡述變位機在機器人焊接應用中的重要性及必要性。由于變位機種類繁多,在此以頭尾架單軸變位機與焊接機器人做7軸聯動的焊接應用為例,變位機結構簡圖如圖1所示。
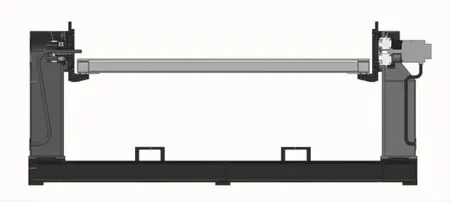
圖1 變位機結構簡圖1—變位底座 2—吊環/叉車孔 3—伺服電機 4—減速機5—機頭支座 6—從動尾座 7—中空從動軸組件8—地線滑環組件 9—變位連接件 10—變位框架
1 焊接機器人應用的發展
據官方數據統計,我國涉及機器人生產的企業已逾1000家,其中超過200家是機器人本體制造企業。其中具有代表性的企業有新松、廣州數控、埃斯頓、埃夫特、新時達、啟帆、歡顏等,這些公司已在機器人產業鏈中游和上游進行拓展,通過自主研發或收購等方式掌握了零部件和本體的研制技術,結合本土系統集成的服務優勢,已經具備一定的競爭力,未來有望實現對國外品牌的進口替代。
從產品類型來看,當前在中國各行業工業機器人的使用百分比分別如下:弧焊占16%,點焊占15%,物料搬運占13%,裝配占22%,噴漆占3%,鑄造占3%,沖壓占3%,上料、卸料占15%,碼垛、檢測、研磨拋光和激光加工等復雜作業占10%。
中商產業研究院發布的《2018—2023年中國工業機器人市場前景及投資機會研究報告》中數據顯示,2017全年中國工業機器人產量達到131 079套,預計2018年工業機器人產量將達到151 286套。
從以上數據可以得出,2017年全年中國焊接機器人產量達到40600多套,預計2018年焊接機器人產量將達到約46900套。
2 焊接變位機的功能介紹
焊接變位機是輔助焊接的重要設備,通過焊接變位機變位功能,可以使得待焊工件獲得理想的焊接位置,并保證平穩的焊接速度。焊接變位機在實際應用中,逐漸作為焊接中心的輔助設備,與機器人配套實現自動化、智能化焊接,可滿足特定的焊接工藝要求,大大提高焊接效率,并保證產品焊接質量、降低生產成本、改善工人的勞動條件。并且焊接變位機的結構也在不斷更新換代,現在已經從傳統的單自由度小容量的焊接變位機演變為雙自由度、多自由度的大容量焊接變位機,在未來市場的應用數量及規模將不斷增加。
3 焊接變位機在機器人焊接應用中的重要地位
焊接變位機主要是通過電機及減速機來驅動工件做軸向±180°轉動,使工件達到合適的角度位置,方便機器人施焊。對于多面體及結構復雜工件,可實現一次裝夾完成所有焊接;對于相貫線焊接,由于機器人與變位機協同作業,保證了焊道的連貫性及一致性,在大大提高了效率的同時也提升了焊接品質。另由于機器人姿態及臂展受限,許多大型工件需要變位機將臂展以外的特征變位至機器人行程范圍內,以方便機器人焊接。為保證焊接品質及焊接的連續性,在自動焊接設計時會盡量避免仰焊及橫焊,故變位機被廣泛應用于五金制品、鐵路交通、治金等領域的焊接自動化項目。
據工廠數據統計,采用機器人配套變位機相對于機器人配套人工翻轉,在生產效率上能提升30%以上,并能釋放出30%~50%的人工操作時間,同時能節省約30%的焊接保護氣體,大大減少了操作工的疲勞強度及工傷事故。
圖2為頭尾架單軸變位機與焊接機器人做7軸聯動的焊接應用配套簡圖。
4 焊接變位機行業的現狀
我國正處于智能制造的高速發展期,很多自動化系統配套還不夠完善。目前,也有不少企業承接變位機及外部軸制作,但總體現狀可以總結為兩個詞:周期長,成本高。盡管近幾年來,變位機在我國工程機械行業有了很大的發展,獲得了廣泛的應用,就型式系列和品種規格而言,已問世的約有十余個系列,百余品種規格,其中60%以上都是焊割變位機。然而,相對機器人行業的蓬勃發展,變位機產業還是相對滯后,行業標準化及產業化有待進一步加強加深。就周期上講,大多企業提供變位機產品需30~45天,而機器人大都是現貨。根據筆者多年行業經驗及工廠數據不難得出:如變位機行業能像機器人行業一樣標準化及產業化,則變位機貨期至少能壓縮一半以上,成本至少能縮減30%以上。
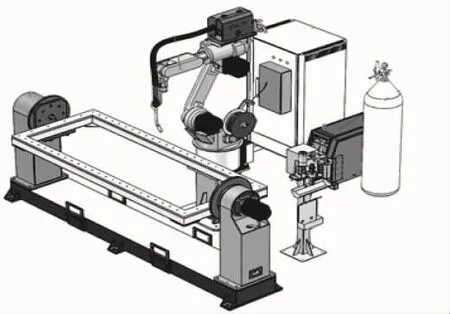
圖2 焊接機器人7軸聯動應用配套簡圖1—焊接機器人 2—機器人控制柜 3—焊槍 4—焊接電源5—清槍剪絲機構 6—單軸變位機 7—焊接保護氣
5 結語
工信部已于2018年4月20日公布了最新的《工業機器人行業規范條件》,并將于后期不斷完善及補充,從而督催機器人產業良性持續發展。變位機行業作為智能制造的一個重要元素,同樣需要標準化及產業化,從而為我國順利實現“中國制造2025”這一階段性宏偉目標貢獻一份力量。
[1]林尚揚,陳善本,李成桐.焊接機器人及其應用[M].北京:機械工業出版社,2000.
[2]姜家高.應用于焊接機器人的變位機控制研究[D].沈陽:沈陽大學,2015.
[3]羅輝.焊接機器人與變位機的協調運動規劃[D].哈爾濱:哈爾濱工業大學,2013.
[4]陶鳳榮.弧焊機器人與變位機的協調運動研究[D].柳州:廣西科技大學,2015.
猜你喜歡
電器工業(2023年1期)2023-02-13 06:31:42
口腔護理用品工業(2021年4期)2021-11-02 08:22:56
機械工業標準化與質量(2018年5期)2018-05-30 09:48:17
中國公路(2017年9期)2017-07-25 13:26:38
水利技術監督(2017年2期)2017-05-17 05:19:25
福建輕紡(2017年12期)2017-04-10 12:56:27
知識經濟·中國直銷(2016年4期)2016-11-07 09:34:05
質量與標準化(2015年7期)2015-07-12 12:21:02
汽車維修與保養(2015年8期)2015-04-17 03:32:51
石家莊理工職業學院學術研究(2014年4期)2014-04-27 14:14:40
