基于籃球比賽協作戰術的多采摘機器人聯合作業系統
2018-07-03 08:30:16董伯云
農機化研究 2018年7期
董伯云
(紹興職業技術學院,浙江 紹興 312000)
0 引言
隨著人工智能的不斷發展,機器人的研究中心已由個體作業轉為聯合作業。而籃球是一項將全體隊員組織起來,采取相互配合發揮集體力量和注重團隊整體協作的手段,爭取打敗對方的比賽。本文結合籃球協作戰術與多機器人聯系作業的特性與優勢,將籃球比賽協作戰術運用于多采摘機器人聯合作業系統中,設計出了具有較高可靠性與穩定性的采摘機器人編隊,對提高多機器人聯合作業效率提供了一種新手段。
1 籃球比賽協作戰術
籃球運動是1892年由美國史密斯博士發明的,迄今為止已達數百年,期間也經歷了多次的創新和改革。目前,“桃子筐”已由最初的鐵籃變為現在的籃網,籃球也從簡單的一項室內游戲成為全球性的偉大體育賽事。從籃球的發展來看,其戰術也經歷了巨大發展,其包含傳切、突分、策應和掩護等在內的數十種,戰術創新決定了比賽是否能夠順利取得勝利。
籃球戰術創新不僅有在前面基礎上的發展創新,也有獨立的完全創新,而現在的戰術大多都是在前面優秀的基礎上進行的再創。再創是指教練在一些經典戰術的基礎上,有針對性的對其加以結構、配合和速度的改變,使其適用范圍更廣。
1.1 籃球戰術體系的認識與分類
在籃球比賽中,運用最多的戰術是快攻、策應和陣地進攻等3種戰術。戰術類型的區別主要在于進攻配合、時間的連續性以及不可逆,即戰術一般是嚴格遵循快攻→策應→陣地進攻等開展,不能出現逆序行為。籃球戰術進攻順序如圖1所示。
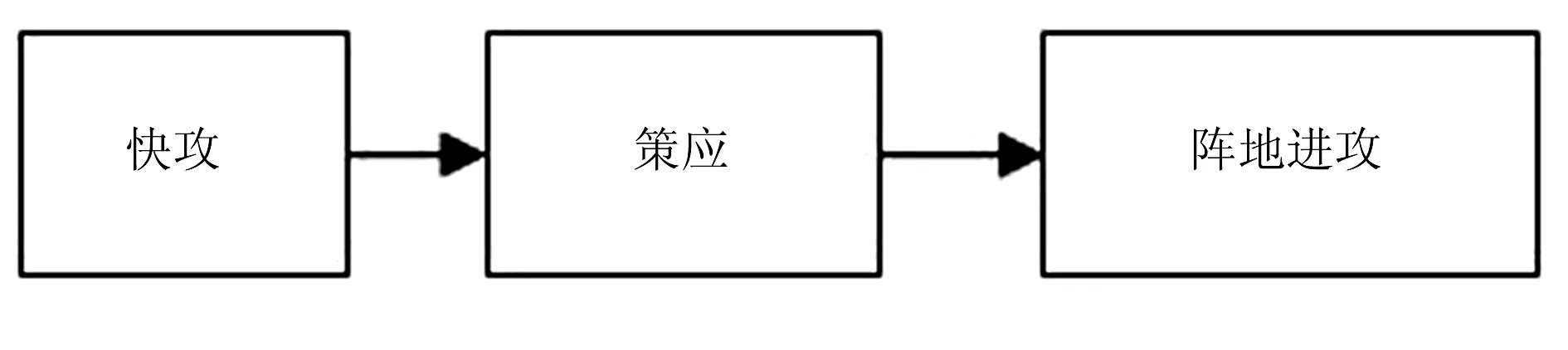
圖1 籃球戰術進攻順序
隨著籃球的不斷改革和發展,在比賽過程中,雙方隊員在半場甚至全場進行球權爭奪大戰,需要在整個球場不斷使用各種戰術,雙方需考慮如何全面開展全場進攻。因此,只是簡單地依靠圖1的3種簡單順序戰術進攻攻防,很難在實際比賽中取得優勢。例如,當防守方運用推進收緊戰術,進攻方首先應該采用快攻,然后采用推進攻到敵方三分球區,最后在敵方后場進行策應和陣地戰術將球投進。策應是指在進攻端球員在對方全場防守或后場防守時,全隊協作將球帶入前場的配合戰術所以在激烈的籃球比賽中,將球從后場帶到前場,整個進攻應該加入推進戰術,如圖2所示。

圖2 完善的進攻戰術順序圖
當進攻方未能成功進球得分,且未能搶得前場籃板球,其身份馬上轉變為防守方,因此應該馬上縮回后場三分線區進行防守,防止對方快攻得分。防下快攻后,應該快速采取落位、協防和配合戰術形成防守局勢,不給敵方采用策應得分的機會,形成防守快攻、協防和配合防守的防守機制。進攻轉防守的戰術順序如圖3所示。

圖3 進攻轉防守的戰術順序
1.2 籃球戰術體系結構
根據籃球比賽的特性,籃球籃球戰術體系包含進攻、爭搶球和防守三大結構。其中,進攻包括快攻、推進、策應和陣地4種爭搶球戰術;爭搶球包括跳球和爭搶球兩種爭搶球戰術;防守包括防守快攻、推進戰術、協防和配合防守戰等4種戰術。在比賽中,進攻配合和球員個體戰術行動是整個進攻體系的基礎,防守配合和球員個體防守行動是整個防守體系的基礎。籃球戰術體系結構如圖4所示。
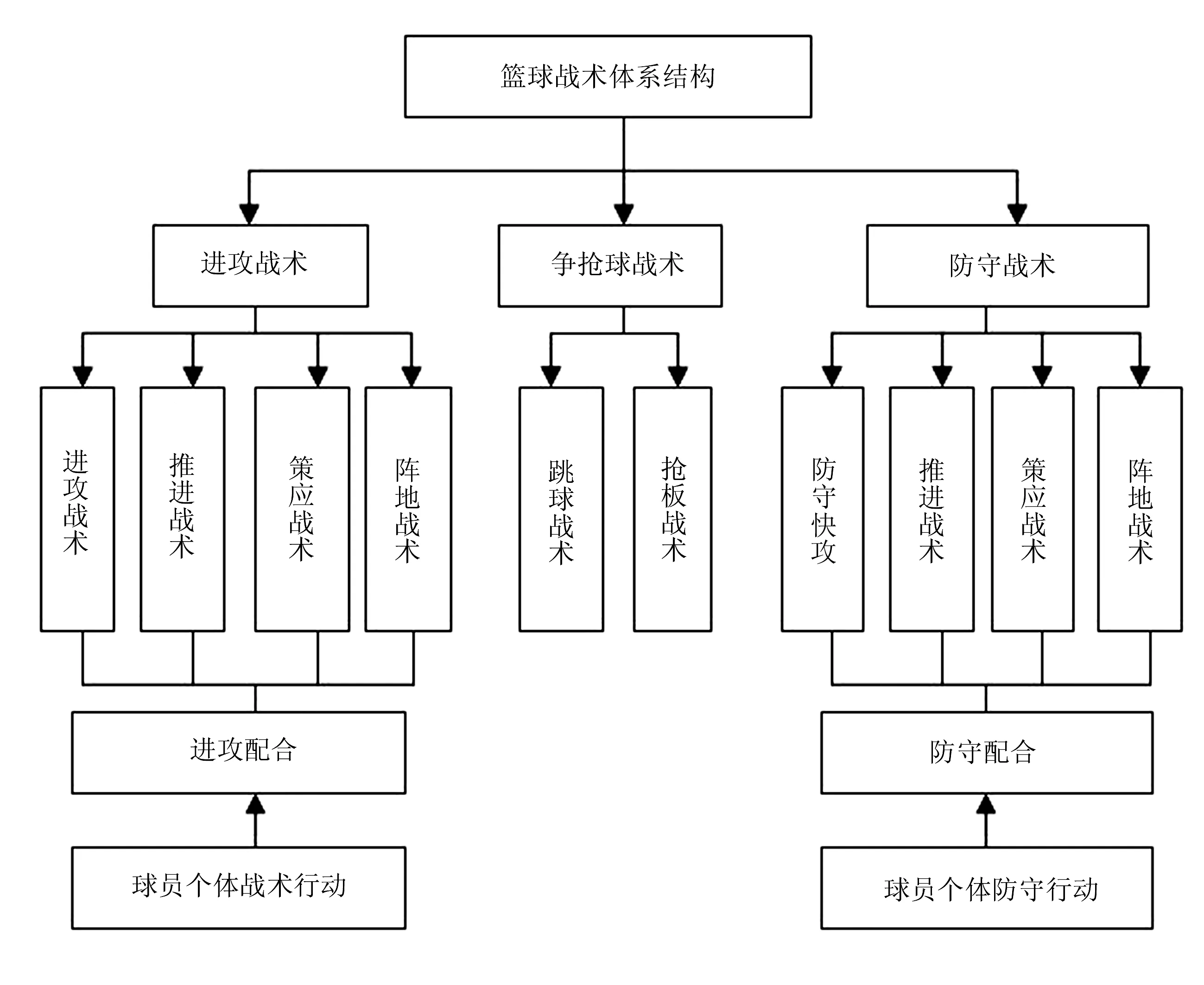
圖4 籃球戰術體系結構圖
2 多采摘機器人任務分配算法
2.1 多采摘機器人系統行為描述
采摘機器人系統行為描述的成員對象和方法包含以下幾點:
1)多采摘機器人所在編隊的集合M={m1,m2,…,mn},n表示機器人的數量。在實際作業中,采摘機器人一般以編隊的形式進行操作,該編隊一般包括多個機器人。
2)作業區域周邊環境集合E={e1,e2,…,et},t為時間節點。
4)任務。多采摘機器人所有任務集合T={T1,T2,…,Tn}。
5)策略。機器人策略是指根據實際分配到任務,采取效率最大的方法進行作業操作。
6)目標。在多采摘機器人系統中,單個機器人都有自己的任務目標,合起來整個系統也有一個整體目標。
2.2 多采摘機器人任務分配算法
1)多采摘機器人任務能力描述。多采摘機器人集合為M={m1,m2,…,mn},則個體的能力Ci為
(1)
其中,αij為機器人mi的能力強弱。
假設任務具有多種類型,那么l個異構任務可以描述為
tk,1≤k≤l
(2)
對于任務tk,其對應的能力描述為
(3)
其中,βij為采摘機器人完成tk需要Cj的強弱。
在整個任務分配算法中,最重要的是機器人Mi能否根據當前作業流暢度、下一任務地點信息完成下一任務tk,則能力判斷表達式為
αij≥βij, 1≤j≤n
(4)
為了方便機器人結合自身能力對該任務進行判斷,可將式(4)改寫為
(5)
對于機器人Mi和下一任務tk,如果存在
αij<βij
(6)
則說明機器人Mi不具備完成任務tk的能力,無法單獨完成該項任務,則可以描述為
(7)
2)多采摘機器人任務分配算法的實現。假設機器人編隊共包含4個采摘機器人,任務數目為10,考慮到機器人各自作業難度和區域的情況不一,則執行一段時間后應對機器人的能力進行重新配置,如表1所示。而機器人是否按照要求完成所有的任務,完成任務的時間也是個主要要求;同時,在作業過程中,應該充分考慮機器人行走路徑總成,最大程度的減少成本。
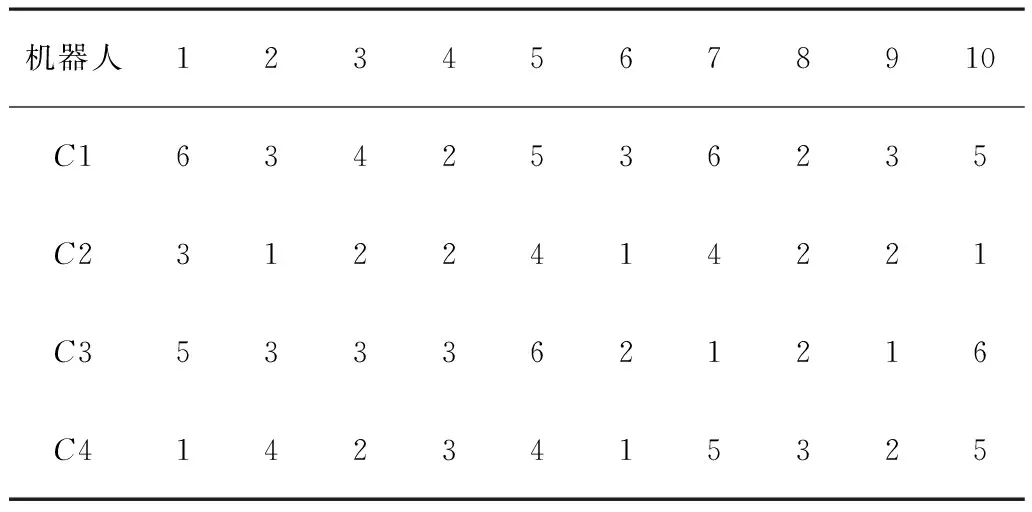
表1 采摘機器人能力配置值
在進行任務分配的過程中,將所有任務的回報值reb設置為最大值MAX,那么機器人完成任務tk的代價為cons(ri1|tk)的方法有兩種:①F1:cons(ri1|tk)=dik;②F2:cons(ri1|tk)=dα*(ktask+kt)。
其中,dik為機器人從當前位置到達指定任務tk需要的路程;dα為完成當前任務和指定任務總共需要行走的路程;ktask和kt為權重系數,可以根據實際情況進行調整。
得到能力配置初始值及任務代價cons的方法后,便可以對任務實施分配,分配流程共有以下5步:
1)觀察作業區域環境狀態,即當前機器人所處位置信息與任務完成情況,提取與任務相關的狀態;
2)計算任務代價cons,并選擇一個能力配置值最高的任務tk;
3)執行任務tk;
4)更新新的能力配置值;
5)重復1)~4),直至完成所有任務。
3 多采摘機器人聯合作業
3.1 多采摘機器人協作模式
多采摘機器人協作模式主要是對機器人之間的合作方式進行規劃,包括集中規劃、分散規劃和分散集中3種模式。
1)集中規劃模式:系統帶有一個具有全局規劃的后臺運行程序,使用該系統可以進行作業任務的全局控制,實現多機器人之間的任務分配和路徑規劃,而機器人只需根據指令執行作業。
2)分散規劃模式:沒有集中規劃的后臺,而是每個采摘機器人根據自身情況指定采摘任務,即所有控制分散處理,大大提高了機器人作業的靈活性。
3)分散集中規劃模式:該模式首先由采摘機器人個體規劃自己的任務和行走路徑,并將規劃提交給后臺主控制系統,協調者根據各機器人的規劃進行適當調整。
分散集中規劃模式具有復雜度低和效率高的特點,適用與具有一定組織結構和協作能力較高的群體,因此本文采用該模式開展協作作業。
3.2 搭建多采摘機器人聯合作業模型
本文利用分散集中規劃的優勢,并將該模式運用與多采摘機器人聯合作業系統中,并設計和建立了多采摘機器人聯合作業的體系和模型。多采摘機器人聯合作業體系和模型分別如圖5和圖6所示。
如圖5所示:系統聯合作業體系結構主要包括通訊、信息融合、感知、規劃和命令發出5個層次。其中,通訊層負責各采摘機器人與后臺總控制器的信息交互;信息融合層負責解析所有信息,并將解析的數據放入信息庫;感知層負責獲取各機器人周邊環境信息;規劃層負責整合各機器人提交的任務規劃,并進行適當修改;命令發出層負責根據給4個機器人發出指令,讓機器人根據環境情況修正作業。
如圖6所示:多機器人聯合作業模型執行任務順序是發布協作任務→建立任務分配算法→機器人自主分配任務→判斷是否達到協作要求→執行并完成任務等,這一協作流程符合采摘機器人在時間、地點不確定的田間進行作業的要求。

圖5 多采摘機器人聯合作業體系結構
4 實驗結果與分析
為了驗證該多采摘機器人聯合作業的能力與效率,本文利用QT 5.7對該系統設計了仿真平臺。仿真平臺采用第3章中所述任務分配算法,多采摘機器人協作采用分散集中模式。在仿真過程中,采摘機器人編隊包含4個機器人,待采摘作業的區域共有27塊,如圖7所示。
經過各機器人自主分配任務后,總控制臺對其進行了微調:機器人M1從第1號區域開始作業,機器人M2從第5號區域開始作業,機器人M3從第16號區域開始作業,機器人M4從第25號區域開始作業,其中作業區域及路徑規劃為
M1:1→2→4→3→8→9→10
M2:5→11→21→12→6→7→13
M3:16→20→19→15→14→18→17
M4:25→27→26→24→23→22
根據以上規劃,各機器人在最短的時間內完成了聯合作業要求,在作業過程中,各機器人行駛路徑最短,效率最高。因此,將籃球比賽協作戰術的任務分配算法與分散集中的控制模式相結合的方法,使得多采摘機器人聯合作業達到了比較好的結果,具有一定的實際應用價值。

圖7 仿真測試結果
5 結論
針對采摘機器人編隊在作業過程中任務分配困難及執行效率較低的問題,將籃球比賽協作戰術的任務分配算法與分散集中的控制模式相結合,運用于多采摘機器人聯合作業系統中,并利用QT 5.7進行了仿真實驗。實驗結果表明:各機器人在最短的時間內完成了聯合作業要求,在作業過程中,各機器人行駛路徑最短,效率最高。
參考文獻:
[1] 高偉,曹昕燕,張萬里,等.基于OFDM-MIMO移動通信模型的采摘機器人設計[J].農機化研究,2017,39(4):129-133.
[2] 唐惠康,鄭寶林.基于SingalR和Web的采摘機器人遠程編隊控制研究[J].農機化研究,2017,39(3): 237-241.
[3] 葛斯楠.基于改進蟻群算法的多機器人任務分配[D].沈陽:沈陽工業大學,2016.
[4] 王友發.面向智能制造的多機器人系統任務分配研究[D].南京:南京大學,2016.
[5] 王維.基于多智能體系統的多機器人路徑規劃方法研究及應用[D].成都:電子科技大學,2015.
[6] 賀橙林.基于機器視覺的氣動采摘機器人研究[D].上海:上海交通大學,2015.
[7] 昝杰.多自主移動機器人協作的關鍵技術研究[D].西安:長安大學,2014.
[8] 王彤.現代籃球比賽中運用搶攻戰術的觀察與分析[D].鄭州:河南大學,2013.
[9] 黎萍,楊宜民.基于博弈論的多機器人系統任務分配算法[J].計算機應用研究,2013(2):392-395.
[10] 周舟,王俊.采摘機器人機械臂的控制與聯合仿真[J].電子技術,2013(1):60-62,38.
[11] 吳笑萍.一類多機器人系統任務分配方法的研究[D].南京:南京理工大學,2012.
[12] 邵杰,楊靜宇,萬鳴華,等.基于學習分類器的多機器人路徑規劃收斂性研究[J].計算機研究與發展,2010(5):948-955.
[13] 胡文.基于MAS的多機器人系統及關鍵技術研究[D].成都:西華大學,2010.
[14] 齊心躍,田彥濤,楊茂,等.基于市場機制的多機器人救火任務分配策略[J].吉林大學學報:信息科學版,2009(5):506-513.
[15] 龔靜,薛德黔,孫增圻.一種多機器人分布式分級協作策略[J].通信技術,2009(9):124-126.
[16] 蔣煥煜,彭永石,應義斌.雙目立體視覺技術在果蔬采摘機器人中的應用[J].江蘇大學學報:自然科學版,2008(5):377-380.
[17] 張崳,劉淑華.多機器人任務分配的研究與進展[J].智能系統學報,2008(2):115-120.
[18] 姜健,閆繼宏,臧希喆,等.基于信息素的多機器人協作任務分配[J].計算機工程與應用,2008(2):20-22.
[19] 秦季冬.基于博弈論的多機器人運動協調[D].南京:南京理工大學,2007.
[20] 高云園.基于生物免疫機理的多機器人協作研究[D].杭州:浙江大學,2007.
[21] 柳林.多機器人系統任務分配及編隊控制研究[D].長沙:國防科學技術大學,2006.
[22] 柳林,季秀才,鄭志強.基于市場法及能力分類的多機器人任務分配方法[J].機器人,2006(3):337-343.
[23] 李俊華.多機器人的協調合作技術與群組控制策略研究[D].西安:西安電子科技大學,2006.
[24] 張勇.現代籃球戰術體系的系統研究[D].北京:北京體育大學,2005.
[25] 湯靜,王晨宇.論籃球比賽中戰術行動的反射控制[J].吉林體育學院學報,2003(1):57-59.
[26] 馮子安.試論當今籃球比賽中戰術運用的特點與要求[J].湖北體育科技,2001(3):25-26,28.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
公民與法治(2020年11期)2020-07-25 02:02:06
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
