基于類人足球比賽決策系統的采摘機器人多路徑優化
2018-07-03 08:30:18劉靈敏
農機化研究 2018年7期
劉靈敏,胡 婧,謝 倩
(武漢晴川學院 計算機學院,武漢 430204)
0 引言
作為機器人家族中的一個重要分支,類人機器人可完成類人行走和各種人類的動作,不僅可以代替人類從事各種作業,而且與生活中常見的機器人比較,有許多突出的優點,如能耗小、對環境適應能力強、活動空間大但是占地面積小等。目前,足球比賽機器人的研究已經較為成熟,為了使比賽機器人具有自主路徑規劃和決策能力,研究此類機器人的專家和學者們嘗試了各種算法,也取得了很多成果。如果將比賽機器人的路徑規劃和決策系統移植到采摘機器人系統上,使采摘機器人也具有類人功能,那將會給農業采摘作業自動化水平的提升帶來重大的突破。
1 基于類人足球比賽決策系統的采摘機器人設計
為了使足球機器人具有類人的功能,需要將智能控制、無線通信、機器視覺和傳感器技術等結合到一起,設計成具有自主規劃能力和路由優化的智能機器人。如圖1所示,法國的Aldebaran機器人公司推出了一款可編程的類人足球比賽機器人,并在比賽中被采用。

圖1 類人足球機器人比賽現場
對于類人機器人的研究,我國起步較晚,但隨著當前科學技術的進步,我國加大了對機器人的研究力度,因此對類人機器人的研究和開發具有重要的意義,對于類人足球比賽機器人,想要實現自主規劃能力,首先需要對球場的信息進行全方位的采集,如圖2所示。
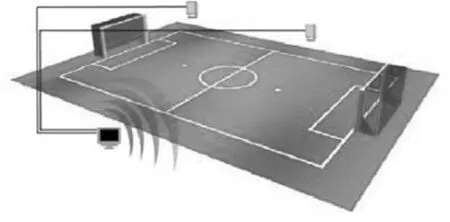
圖2 類人足球機器人決策系統信息采集示意圖
類人足球機器人決策的信息采集系統可以全方位立體化地采集整個比賽場地的數據,采集的數據通過圖像處理,鎖定球門目標,并利用路徑規劃得到最佳優化路徑,最后將指令發送給動作終端,執行動作。
如圖3所示:硬件部分的核心處理器采用S3C6410處理器,可以完成圖像的處理、圖像的識別、目標鎖定、路徑優化和自主決策,其計算量較大,因此加了一個16位的單片機分擔定位和決策算法。
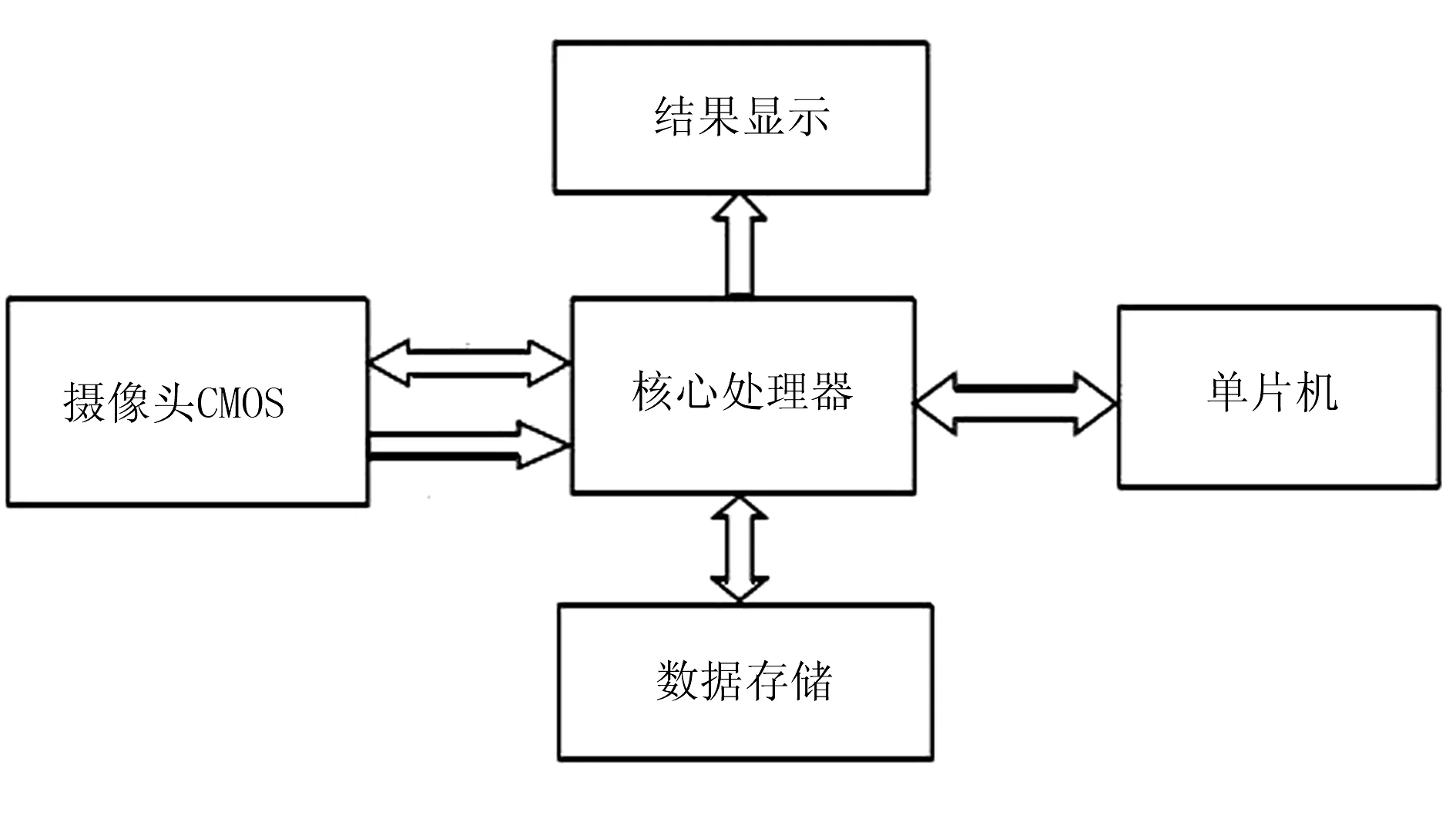
圖3 硬件部分設計
如圖4所示,決策系統的時間首先要考慮兩方面的因素:一方面是要求決策系統具有實時性;另一方面需要機器人自身具有較強的靈活性,具有自主動作能力,系統響應迅速準確。為了提高系統反應的迅速性和準確性,采用神經網絡訓練算法和模糊決策規則庫對系統進行改進,使系統具備自主規劃能力的同時具有較快的反應能力和靈活性。
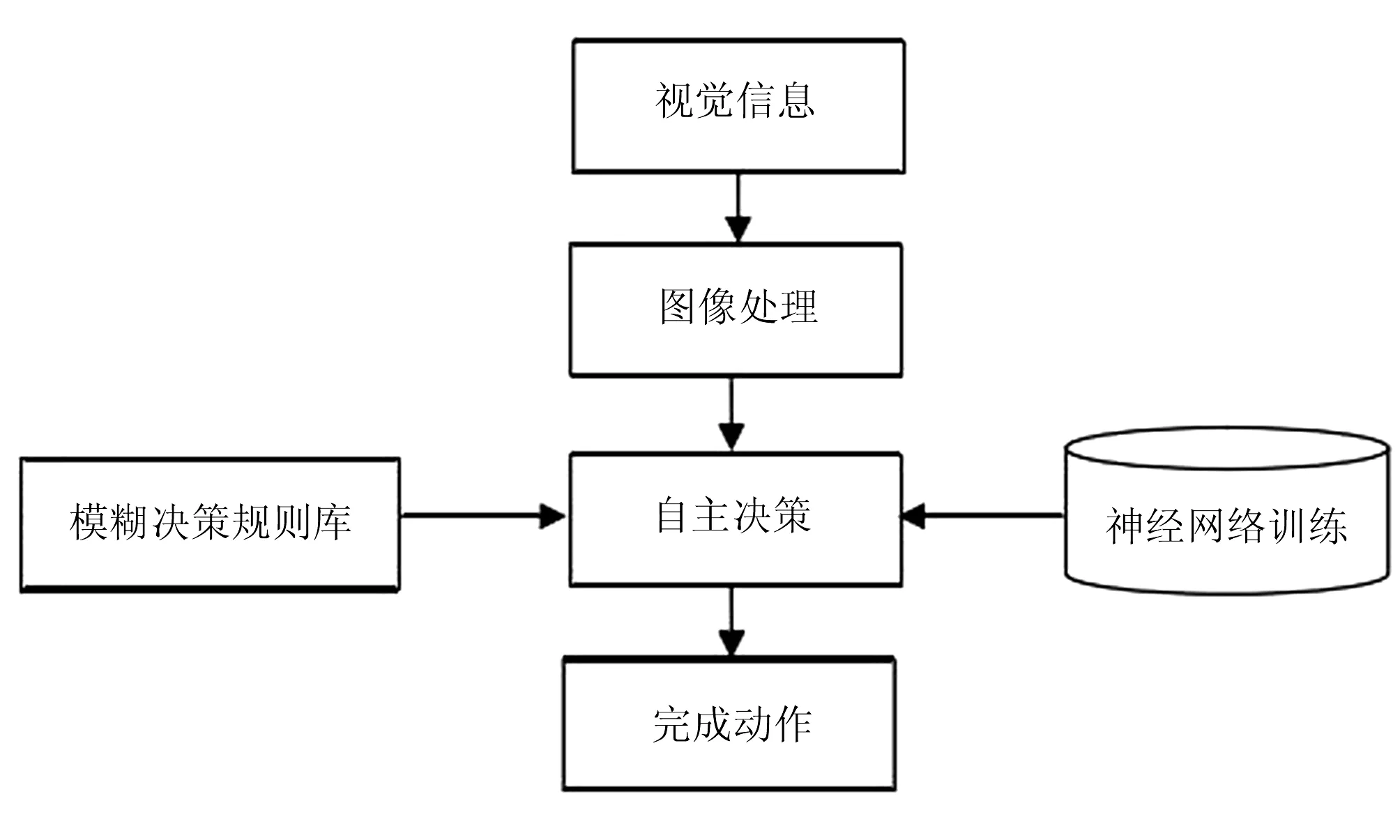
圖4 決策系統框圖
2 小波神經網絡和模糊控制算法足球比賽機器人決策路徑優化
為了使足球比賽機器人具有自主的決策能力,可以采用神經網絡訓練的方法使足球比賽機器人具有路徑優化的能力,然后通過模糊控制算法使其具有基本的自主決策能力。在足球機器人比賽路徑優化時,需要結合神經網絡訓練算法,通過控制指令信號對足球和目標球門的多條路徑進行不斷的學習和優化,從而預測出多條路徑。為了提高神經網絡的算法精度,將小波算法和神經網絡算法結合,假設基本的小波函數為x(t),將其平移b后,把預測信號和a做內積,其表達式為
(1)
其中,h表示卷積函數,等效時域的表達式為
(2)
在足球比賽神經網絡訓練算法中引入小波算法后,在隱含層神經網絡傳遞函數節點的作用下,誤差在向前傳播時會反向傳播,從而有效提高了神經網絡訓練算法的精度。假設足球比賽路徑決策輸入的訓練信號為x1,x2,…,xk,小波神經網絡的預測優化路徑輸出信號為y1,y2,…,yk,通過利用小波函數對權值ωk進行修正后,可以使訓練得到的路徑值和期望實現的目標值不斷接近。輸出路徑的表達式為
y(k)=∑ωkx(k)
(3)
小波神經網絡的預測誤差為
e=∑yn(k)-y(k)
(4)
根據預測誤差,對小波基函數系數和神經網絡權值進行修正,其表達式為
(5)

(6)
其中,η表示學習效率。為了實現足球比賽機器人的自主決策,還需要借助于機器視覺系統,假設機器視覺系統為局部坐標系,其某點的坐標為(x′,y′),在全局坐標系的坐標為(x0,y0),在運動過程中與全局坐標系夾角為θ,利用三角變換可得
(7)
該點在絕對坐標系中的坐標值為
(8)
(9)
假設足球比賽決策機器人的左右輪角速度分別為ωl、ωr,則其速度分別為
(10)
(11)
其中,R表示驅動輪的半徑;D表示兩輪間的距離。其方向的控制可以通過調整兩輪的轉速,利用轉速差來實現。假設兩輪的轉速比為kp,則有
(12)
調整kp的值,可以實現對足球比賽機器人的決策,而利用神經網絡訓練得到的路徑優化,通過對kp的設定和不斷的學習訓練,最終得到一條最佳的路徑;然后將路徑以脈沖的形式進行編碼,假設在第k個采樣周期內其計算脈沖分別為mk和nk,則足球比賽決策機器人的控制模型可以寫成
(13)
其中,xk+1、yk+1、θk+1分別表示是第k+1個周期時機器人的位移和方向;Mp表示機器人驅動輪轉動1圈時的脈沖數;Δt表示采樣時間。
3 基于類人足球比賽決策系統的采摘機器人多路徑優化
為了驗證將足球比賽決策系統引入到采摘機器人系統中帶來的智能性,虛擬了采摘機器人的采摘場景。其中,果實可以模擬成足球,對于果實的采摘即是對足球的控制,如圖5所示。
同足球比賽機器人的原理類似,類人采摘機器人可以自主鎖定待采摘果實,并通過小波神經網絡訓練得到多跳優化路徑,最后利用模糊決策算法對路徑作出最終的決策。
圖6表示根據足球比賽決策系統設計的采摘機器人的系統。其中,果實按照足球場隊員的形式排列,通過神經網絡訓練、機器視覺信息采集和模糊決策算法,實現最佳路徑選擇。首先,對通信進行了測試,測試結果如表1所示。
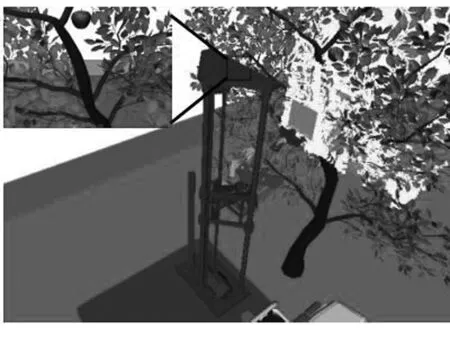
圖5 采摘機器人采摘情境模擬

圖6 采摘機器人路徑優化系統總體設計
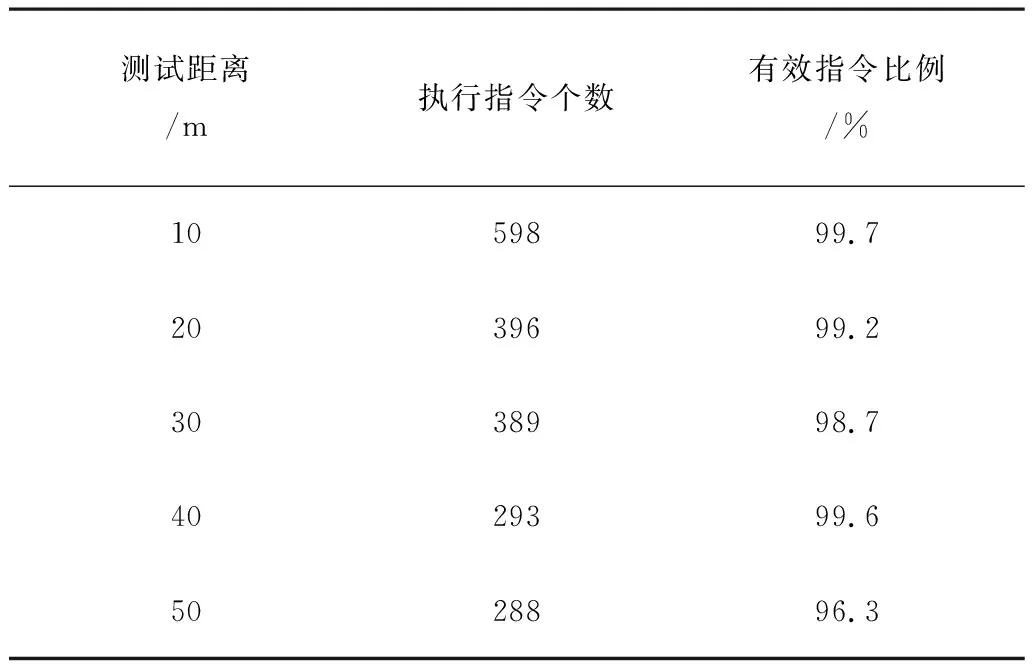
測試距離/m執行指令個數有效指令比例/%1059899.72039699.23038998.74029399.65028896.3
由測試數據可以看出:系統的抗干擾性和穩定性較好,誤碼率幾乎為零,滿足通信需求。對采摘機器人自主路徑規劃效果進行了測試,其過程如圖7所示。
在多目標果實存在的情況下,采摘機器人在路徑優化過程中會產生較多的路徑,圖7中1~5表示采摘機器人為實現目標而規劃的路徑,而采用小波神經網絡和模糊決策算法可以有效地提高路徑選擇的準確性和效率。
為了驗證小波神經網絡和模糊決策算法對采摘機器人路徑優化的效果,本次測試對多種算法進行了對比。由表2的對比結果可以看出:采用小波神經網絡和模糊決策算法可以明顯地縮短路徑優化所需時間,且得到的路徑最短,從而驗證了算法的可靠性。
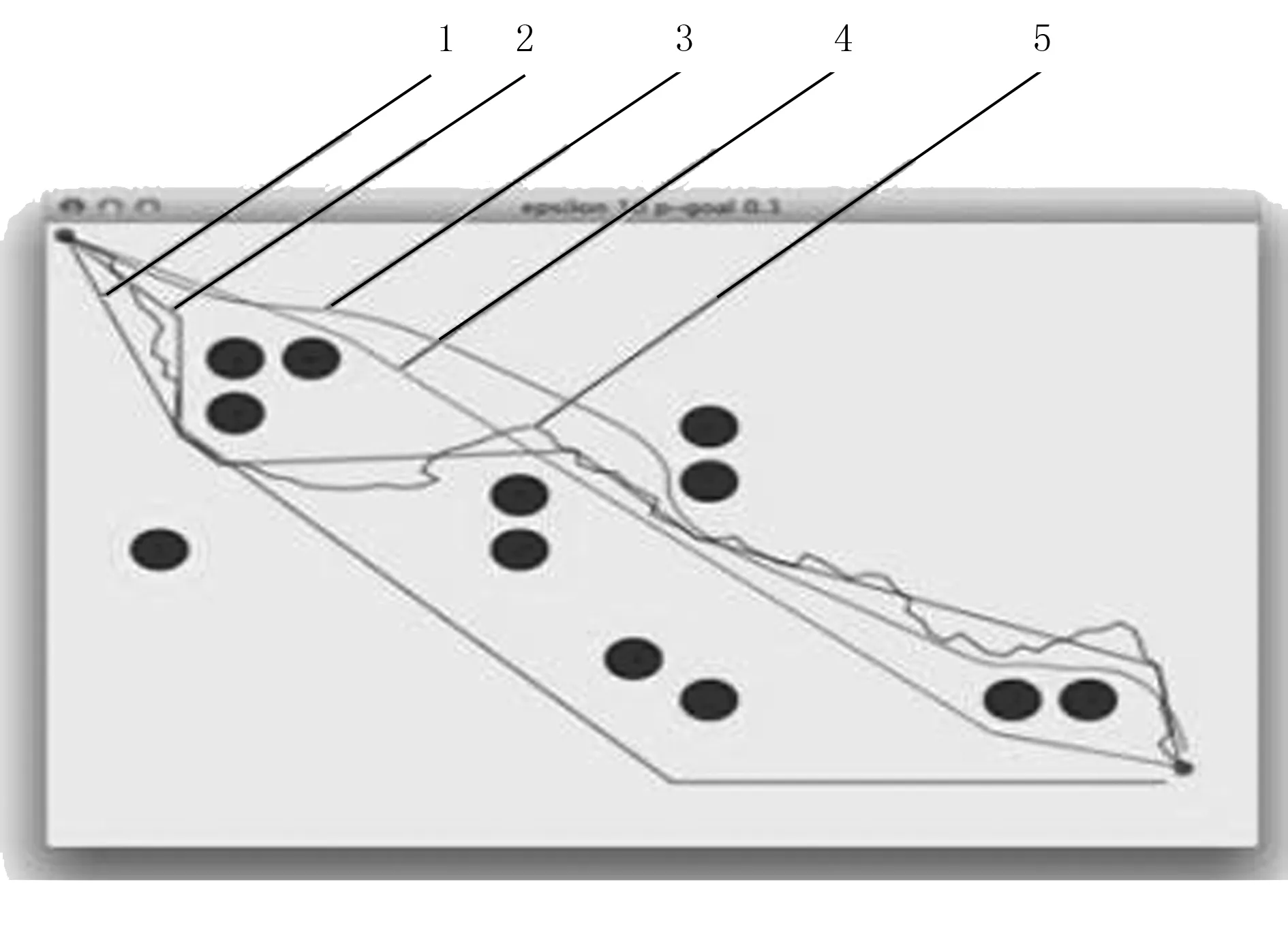
圖7 采摘機器人路徑自主選擇過程

算法時間/s長度/m蟻群算法22.3150.23遺傳算法25.3268.12聚類算法21.6362.12小波神經網絡模糊控制算法15.6832.36
4 結論
為了提高采摘機器人的自主動作能力,提高其作業效率,將足球比賽機器人決策系統移植到了采摘機器人的控制系統設計過程中,同足球比賽機器人的原理類似,類人采摘機器人可以自主鎖定待采摘果實,并通過小波神經網絡訓練得到多條優化路徑,最后利用模糊決策算法對路徑作出最終的決策。為了驗證該方案的可行性,對采摘機器的自主動作和規劃能力進行了測試,并將其和不同的算法進行了對比,結果表明:采用小波神經網絡訓練和模糊決策算法可以有效提高采摘機器人的反應能力,縮短了路徑規劃所需時間,提高了路徑擇優的準確性。
參考文獻:
[1] 李寒,王庫,曹倩,等.基于機器視覺的番茄多目標提取與匹配[J].農業工程學報,2012,28(5):168-172.
[2] 項榮,應義斌,蔣煥煜.田間環境下果蔬采摘快速識別與定位方法研究進展[J].農業機械學報,2013, 44(11):208-223.
[3] 蔡健榮,孫海波,李永平,等.基于雙目立體視覺的果樹三維信息獲取與重構[J].農業機械學報,2012,43(3):153-156.
[4] 連曉峰,張弢,劉載文.RoboCup中型組機器人足球相關技術研究[J].機器人技術與應用,2009(3):35-38.
[5] 段勇,崔寶俠,徐心和.多智能體強化學習及其在足球機器人角色分配中的應用.控制理論與應用,2009,26(4):371-376.
[6] 韓永,劉國棟.RoboCup小型足球機器人建模及仿真平臺研究[J].計算機仿真,2007,24(1):154-157.
[7] 劉曉燕,李孝安,段俊花,等.基于ZigBee的集控式足球機器人通訊系統[J].計算機測量與控制,2007,15(6):740-744.
[8] 劉銀萍.基于PTR6000的足球機器人無線通信系統的設計[J].現代電子技術,2012,35(9):45-47.
[9] 周軍,邵世煌.基于nRF2401的足球機器人無線通信系統[J].測控技術,2008,7(27):94-98.
[10] 王曉明.基于VisualBasie的無線通訊管理系統設計[J].電腦知識與技術,2009,5(13):377-378.
[11] 安方方,馬翠玲.自主陸地車輛的發展及其關鍵技術研究[J].物聯網技術,2013,3(9):77-80.
[12] 陳旭娟.機器人圖像處理方法研究[J].現代商貿工業,2013(8):197-198.
[13] 郭煒強,燕飛,黃儒樂,等.基于視頻圖像的森林火災煙霧識別方法[J].儀器儀表學報,2011,32(6): 116-121.
[14] 黃儒樂,吳江,韓寧.林火煙霧圖像自動識別中的模式分類器選擇[J].北京林業大學學報,2012,34(1):92-95.
[15] 韓媞,關宇東,徐梟宇.基于圖像識別算法的森林防火系統設計[J].科技導報,2008,26(5):77-80.
[16] 徐鵬,任波.基于單高斯模型的森林火災煙圖像目標檢測[J].計算機與現代化,2009(2):18-20.
[17] 練秋生,李黨.融合多種特征的煙霧圖像檢測算法[J].光學技術,2009,35(4):523-531.
[18] 王元園,張健,韓寧.基于GIS的森林火災視頻監控定位方法研究[J].林業機械與木工設備,2008,36(5):24-26.
[19] 魏澤鼎,賈俊國,王占永.基于視覺傳感器的棉花果實定位方法[J].農機化研究,2012,34(6):66-68.
[20] 王海青,姬長英,顧寶興,等.基于機器視覺和支持向量機的溫室黃瓜識別[J].農業機械學報,2012,43(3):163-167.
[21] 王輝,毛文華,劉剛,等.基于視覺組合的蘋果作業機器人識別與定位[J].農業機械學報,2012,43(12):165-170.
[22] 李立君,李昕,高自成,等.基于偏好免疫網絡的油茶果采摘機器人圖像識別算法[J].農業機械學報,2012,43(12):209-213.
[23] 王文慶,張濤,龔娜.基于多傳感器融合的自主移動機器人測距系統[J].計算機測量與控制,2013,21(2):343-345.
[24] 韋偉,周凌翱,劉青.一種便攜式的紅外測距系統[J].電子設計工程,2011,19(21):40-42.
[25] 劉金龍,丁為民,鄧巍.果園對靶噴霧紅外探測系統的設計與試驗[J].江蘇農業科學,2012,40(12):370-372.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
