皮卡車主動懸架防側翻控制策略研究*
2018-07-04 13:08:04李勝琴劉軒齡馮新園
武漢理工大學學報(交通科學與工程版) 2018年3期
關鍵詞:控制策略
李勝琴 劉軒齡 馮新園
(東北林業大學交通學院 哈爾濱 150040)
0 引 言
皮卡等小型貨車由于質心位置比較高,車身寬度相對小,當路面條件發生突變或者駕駛員緊急操作時,容易發生側向失穩,嚴重失穩時則會發生側翻事故,不僅會對車內乘員的人身安全造成危害,還會對交通環境產生影響[1-2],因此,有必要針對皮卡車的結構及工作特點,基于其自身系統,進行輛的抗側翻穩定性研究.
Nam等[3]提出通過控制輪胎側向力,實現對車輛側翻力矩的控制,通過傳感器獲得輪胎側向力與側傾角的信號,當實際數值超過側翻閾值時,側翻力矩控制器開始工作.國內對車輛主動防側翻控制技術的研究主要集中在差動制動、主動轉向等單一控制方式,Zong等[4]提出了利用差動制動的控制方法,對重型半掛車進行多個目標的控制,對車輛的橫擺、折疊等采用LRQ最優控制加以控制,最終表明該算法能夠大幅度減小側翻的發生.文獻[5-7]進行了利用主動轉向系統對車輛施加橫擺力矩實現防側翻控制技術的研究.
由于懸架系統能夠調整車輪垂向附著力及車身姿態,因而可以采取某種控制措施,及時調整即將發生側翻車輛的車身姿態,以維持車輛側傾穩定性.Yim等[8]提出差動制動與主動懸架系統聯合控制車輛的質心高度和行駛速度,采用二次線性最優控制方法控制半主動懸架及控制附加橫擺力矩的兩個模糊控制器,進而實現車輛側傾穩定性控制.仿真結果表明,該控制策略能有效防止車輛發生側翻.廖聰等[9]設計出基于主動懸架的H∞控制策略,結果顯示,所提出的控制策略,能夠可靠地減小車輛在沿曲線運行過程中的側向轉動,提升了車輛的穩定性,減小側翻發生的幾率.嚴鐘輝等[10]通過對1/2車輛懸架動力學分析,構建主動懸架集成控制系統,以增強車輛在高附著道路上高速轉向時的防側翻性能,并且該系統具有良好的路徑追隨控制能力.
本文針對皮卡車的結構及運行特點,建立車輛側翻模型,進行主動懸架防側翻控制策略研究,以增強皮卡車的抗側翻能力,降低側翻的發生幾率.
1 車輛側翻模型
1.1 參數化建模
利用CarSim軟件建立包含制動、轉向、懸架等子系統的整車參數化模型.選用車型基本參數見表1.建立皮卡車的參數化模型,見圖1.
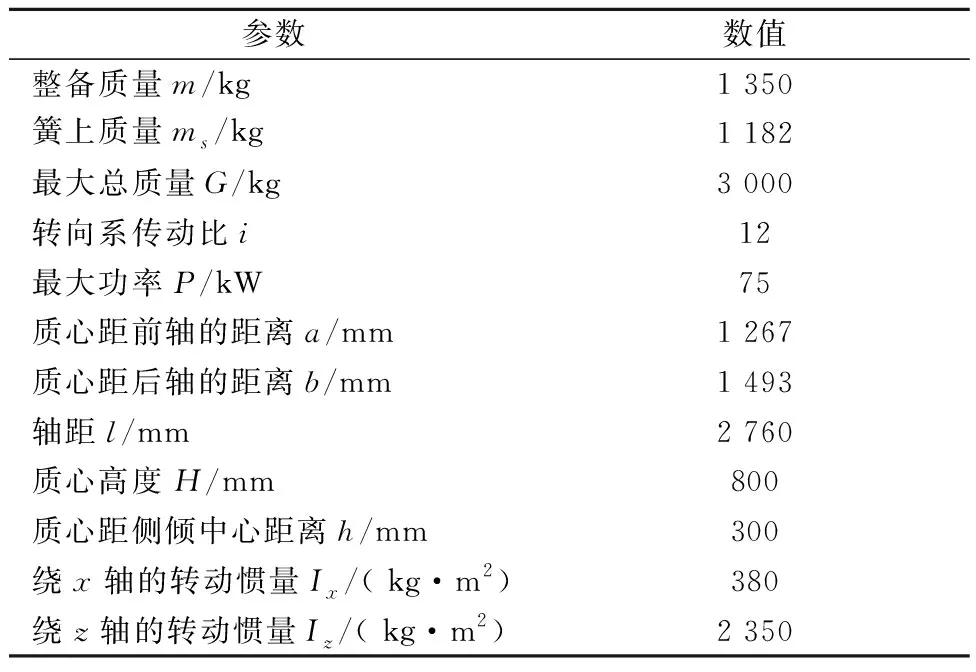
表1 車型基本參數
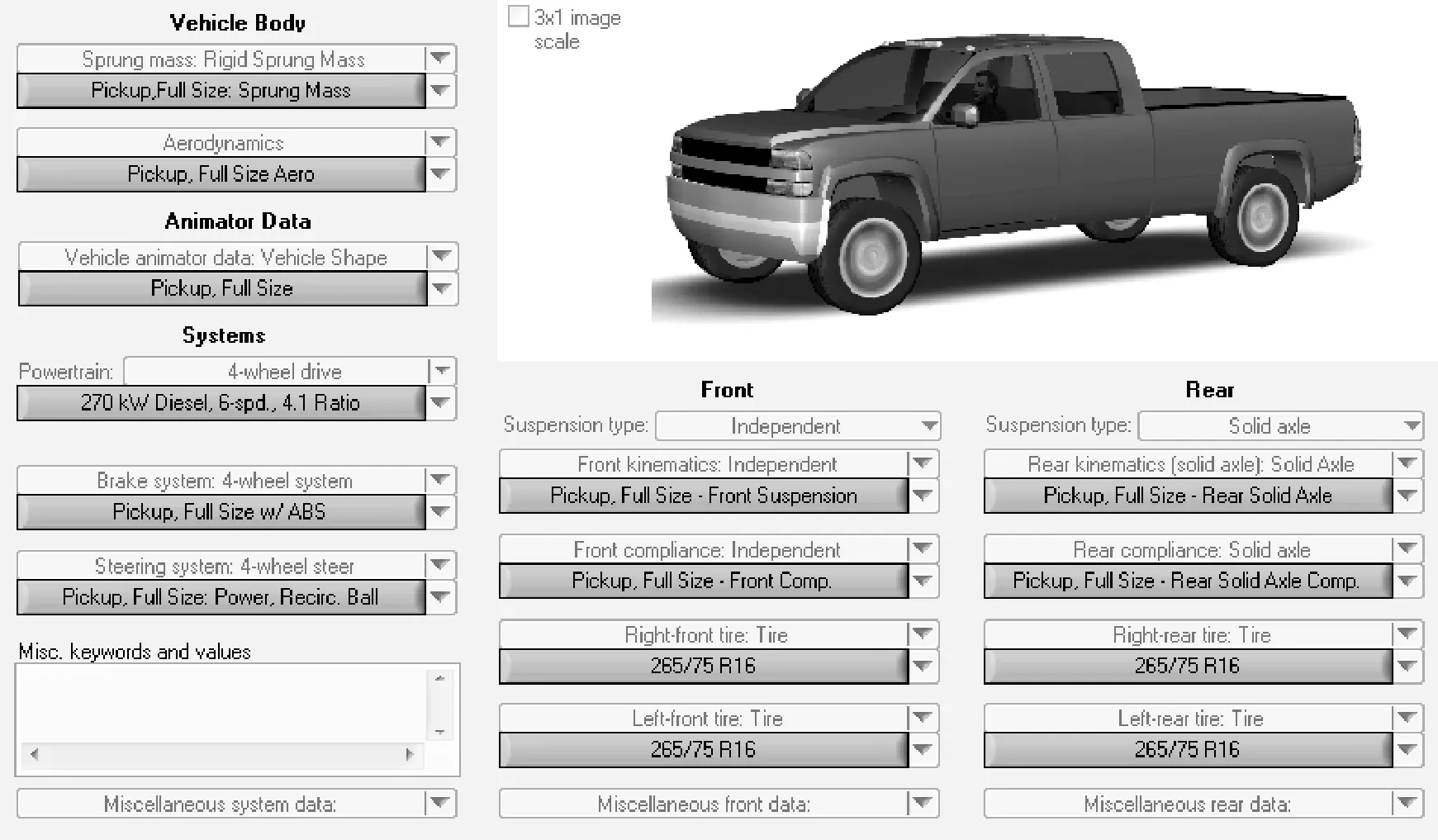
圖1 CarSim整車模型
1.2 車輛側翻性能指標
車輛側翻性能指標可用于判斷車輛是否即將發生側翻,這些指標也可作為激活控制器的重要依據.本文將選取橫向載荷轉移率(LTR)作為判斷車輛是否有發生側翻可能的指標.車輛橫向載荷轉移率是指車輛的左、右車輪垂直載荷之差與其之和的比值,定義為車輛橫向載荷轉移率,其表達式為
(1)
式中:FL為車輛左側前后車輪垂直載荷之和;FR為車輛右側前后車輪垂直載荷之和.
在行駛過程中,車輛有一側車輪抬起,該側的車輪垂直載荷變為零,即發生側翻.假設車輛載荷對稱,可得LTR∈[1,1].當車輛直線平穩行駛時,左右車輪載荷相等,即LTR為0;當LTR大于0時,說明車輛在發生向左側的側傾;反之,則說明車輛在發生向右側的側傾.
本文取LTR絕對值為0.8作為側翻閾值.當LTR值大于0.8或者小于-0.8時,即LTR的絕對值超過0.8時,防側翻控制系統將判定車輛即將要發生側翻,需要激活控制器開始工作.
2 主動防側翻控制策略
本文利用懸架控制策略,通過兩側懸架縱向主動控制力的差動輸入,調節懸架工作狀態,進而調整車身姿態,從而避免車輛側翻.
2.1 控制系統的設計
控制系統旨在為運行過程中的車輛減小并抑制側翻的發生,所以需要采集車輛在運行過程中的狀態數據,根據實時數據進行計算,從而判斷是否激活主動防側翻控制系統,控制系統示意圖見圖2.
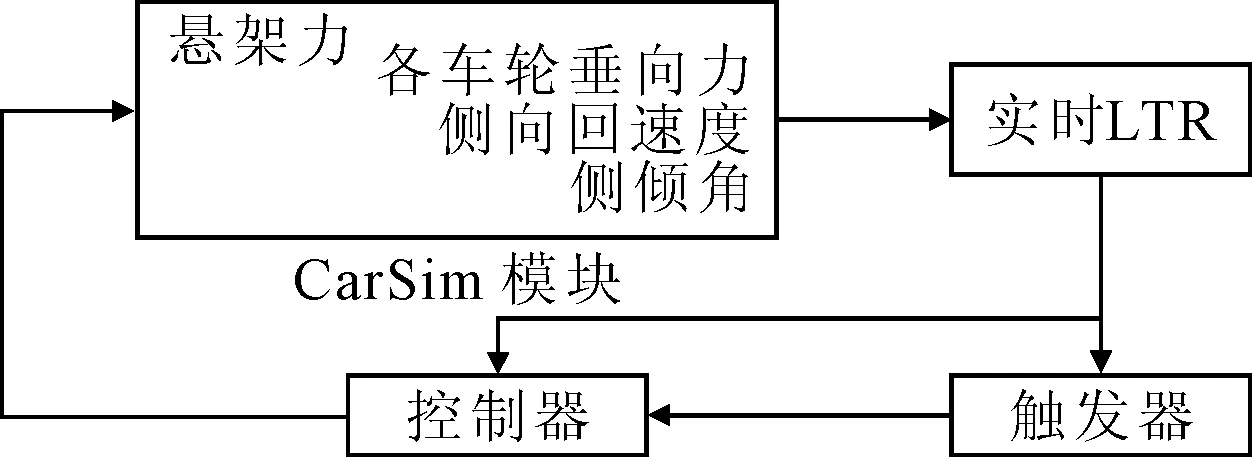
圖2 控制系統示意圖
首先利用CarSim模型輸出各個車輪的垂向力、側向加速度和車身側傾角等車輛運行過程中的實時狀態參數值,計算出車輛的實時LTR值,并根據LTR的數值判斷是否需要激活控制器開始工作.當控制系統被激活時,控制器向CarSim車輛模型中輸入適當的主動懸架控制力,通過調節懸架的工作狀態,以矯正車身側傾姿態,從而減小側翻的趨勢,并在新的狀態下再次采集車輛運行狀態數據計算LTR,判斷是否繼續向主動懸架施加控制,直至LTR數值調整到±0.8之內,從而實現系統的實時反饋控制.
2.2 PID控制器的設計
常規 PID 控制器結構簡單,在工程中得到了普遍的應用.本文的PID控制原理見圖3.
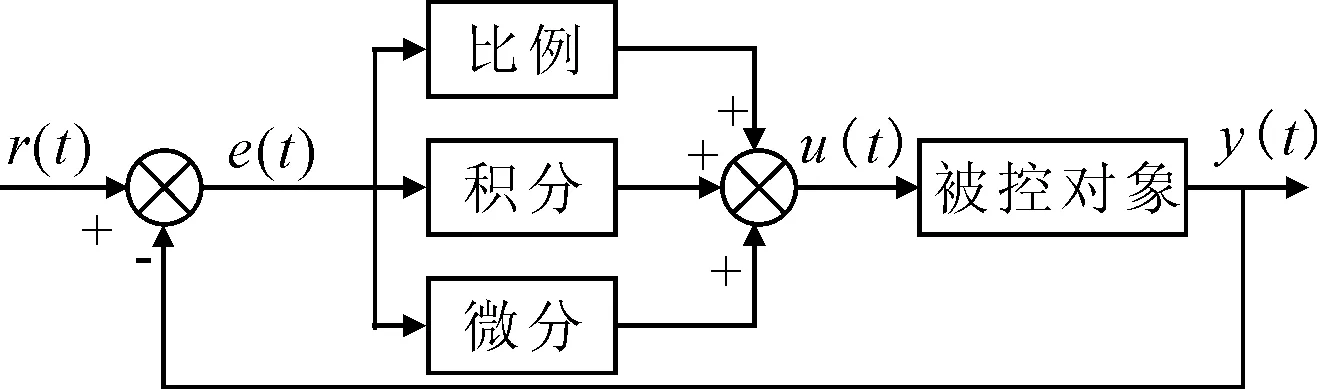
圖3 PID控制原理
本文所設計的控制系統最理想的目標是使得LTR值為零,因此將r(t)設為0,實際的CarSim模型輸出的LTR值設為y(t),兩者相減得到的偏差e(t)作為控制器的輸入量,經過PID控制器之后,即可得到輸出量u(t),即被控對象的懸架主動控制力.
2.3 模糊控制器設計
模糊控制器的原理見圖4,采用與上述相同的方法取得誤差e,誤差e和誤差的變化率ec經過模糊化后轉換到模糊論域中.
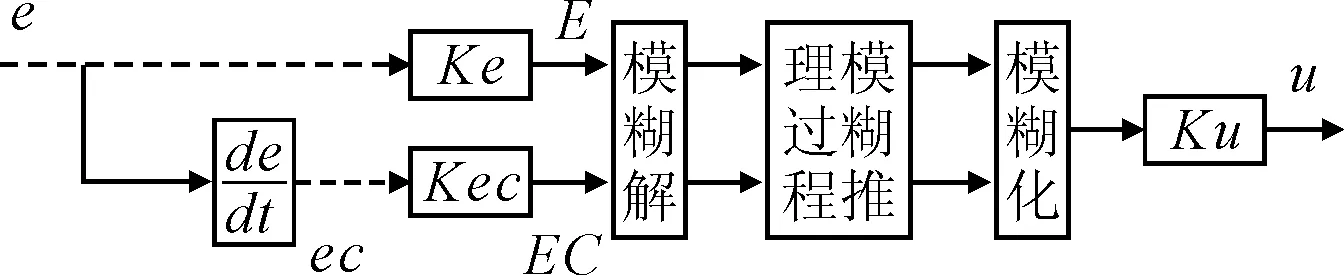
圖4 模糊控制器的原理圖
其隸屬度函數見圖5~6,轉化后對應到模糊論域中語言變量分別為E和EC.
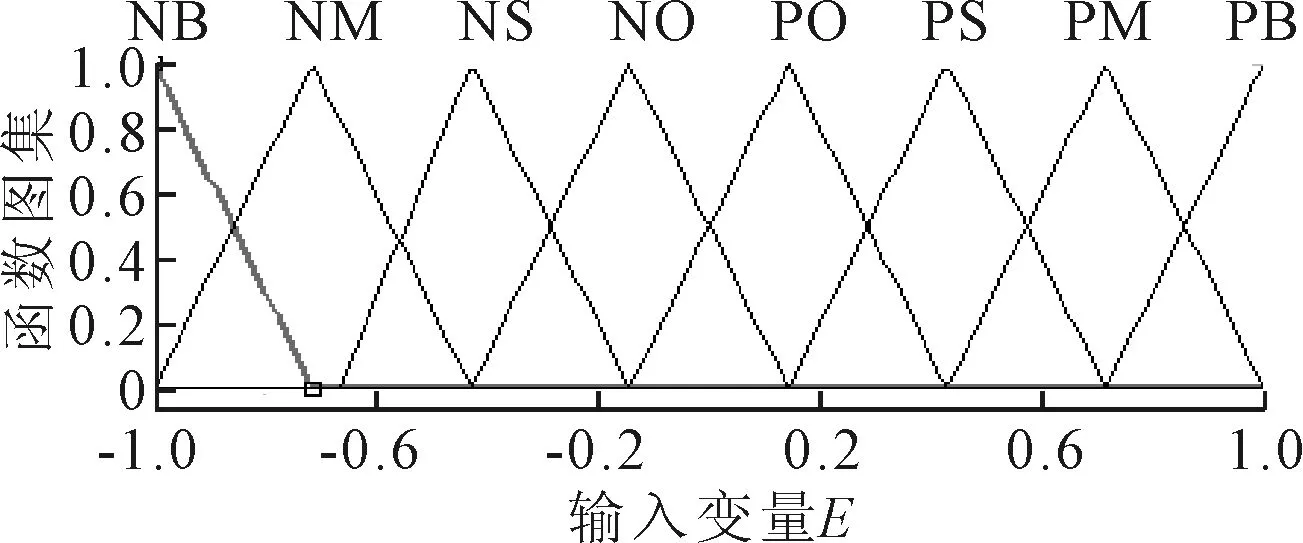
圖5 輸入變量E的隸屬函數
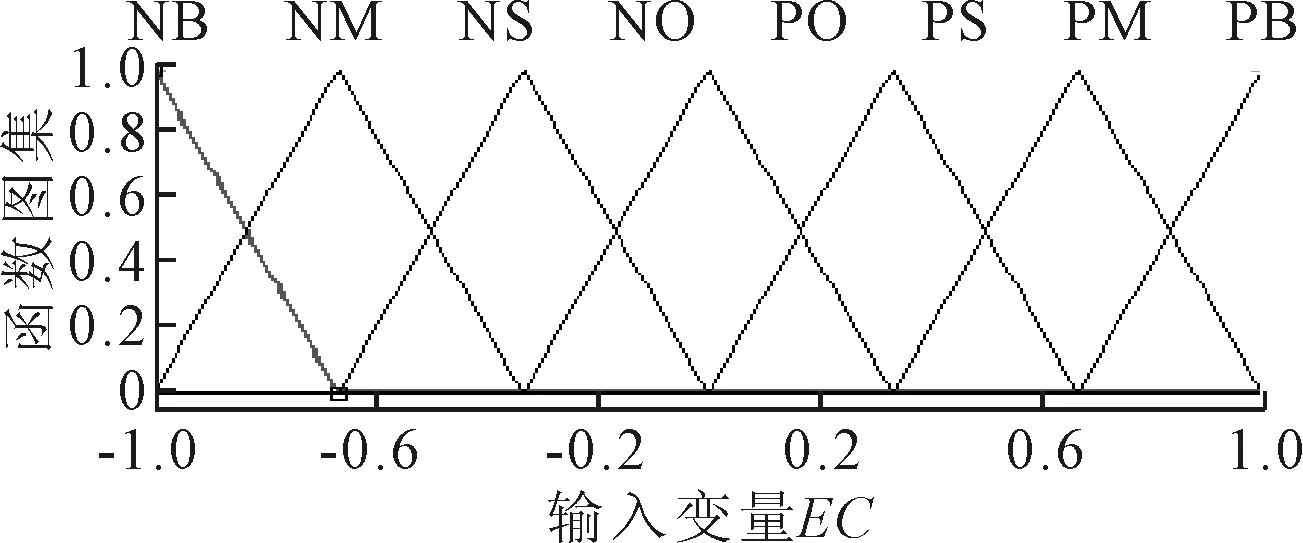
圖6 輸入變量EC的隸屬函數
經過模糊規則推理以及解模糊后可得控制輸出u,模糊論域中對應U,輸出變量隸屬度函數見圖7.
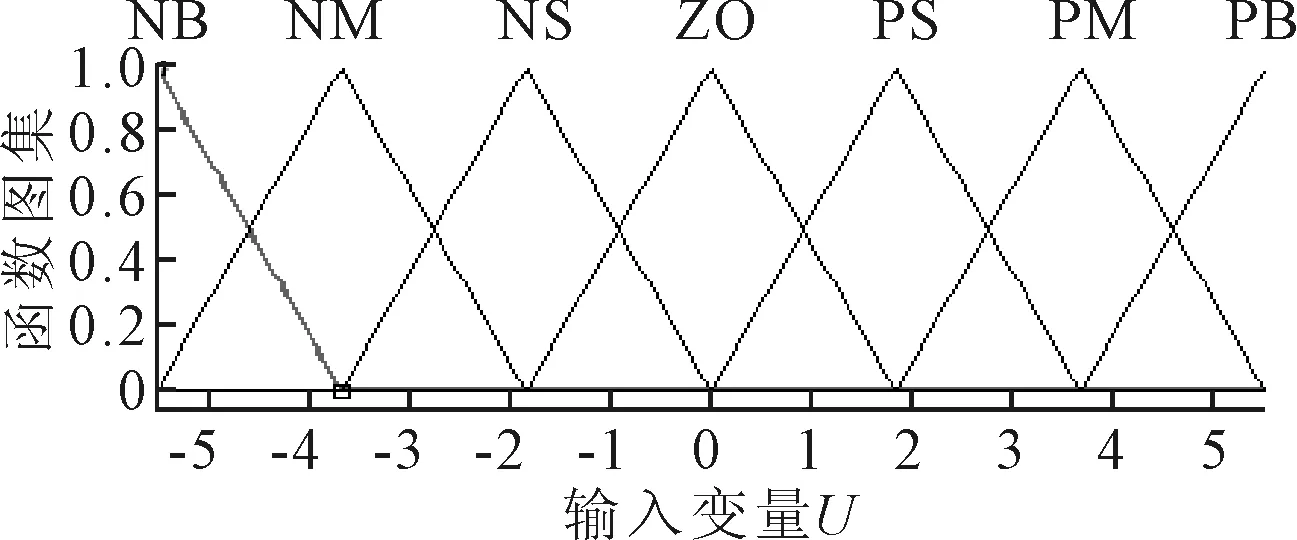
圖7 輸出變量U的隸屬函數
設定e的基本論域為[-e,e],ec的基本論域設定為[-ec,ec],設定被控對象的基本論域為[-u,u].對應的模糊子集分別為
誤差E: {NB,NM,NS,NO,PO,PS,PM,PB};
誤差變化率EC: {NB,NM,NS,ZO,PS,PM,PB};
控制輸出量U: {NB,NM,NS,ZO,PS,PM,PB}.
由此,根據工程經驗見表2模糊控制規則表.根據表2所設計的模糊控制規則,在Matlab的FIS編輯器中對模糊規則進行編輯.
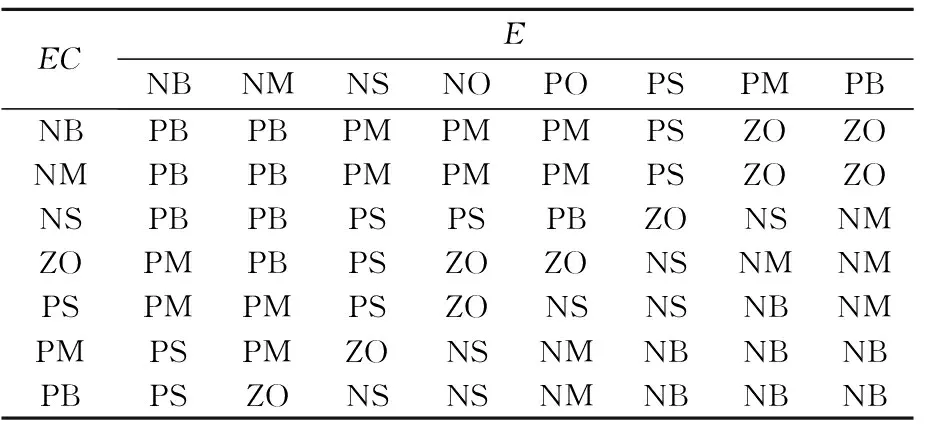
表2 模糊控制規則表
3 主動防側翻控制策略的驗證
3.1 聯合仿真模型的建立
在Simulink環境下建立車輛控制聯合仿真模型,見圖8.輸入量包括左前、左后、右前、右后懸架的主動控制力.輸出量包括左前、左后、右前、右后輪胎的垂直載荷、側向加速度、質心側偏角、橫擺角速度、車身側傾角.

圖8 聯合仿真模型
其中,分配器子系統見圖9,其作用為根據先前信號選擇器和激活器的判斷,將相應的懸架主動控制力輸入給相對應的懸架,即當LTR大于0.8時,將控制器產生的懸架力輸入給左側懸架正方向的控制力,當LTR小于-0.8時,將控制器產生的懸架力輸入給右側懸架正方向的控制力.
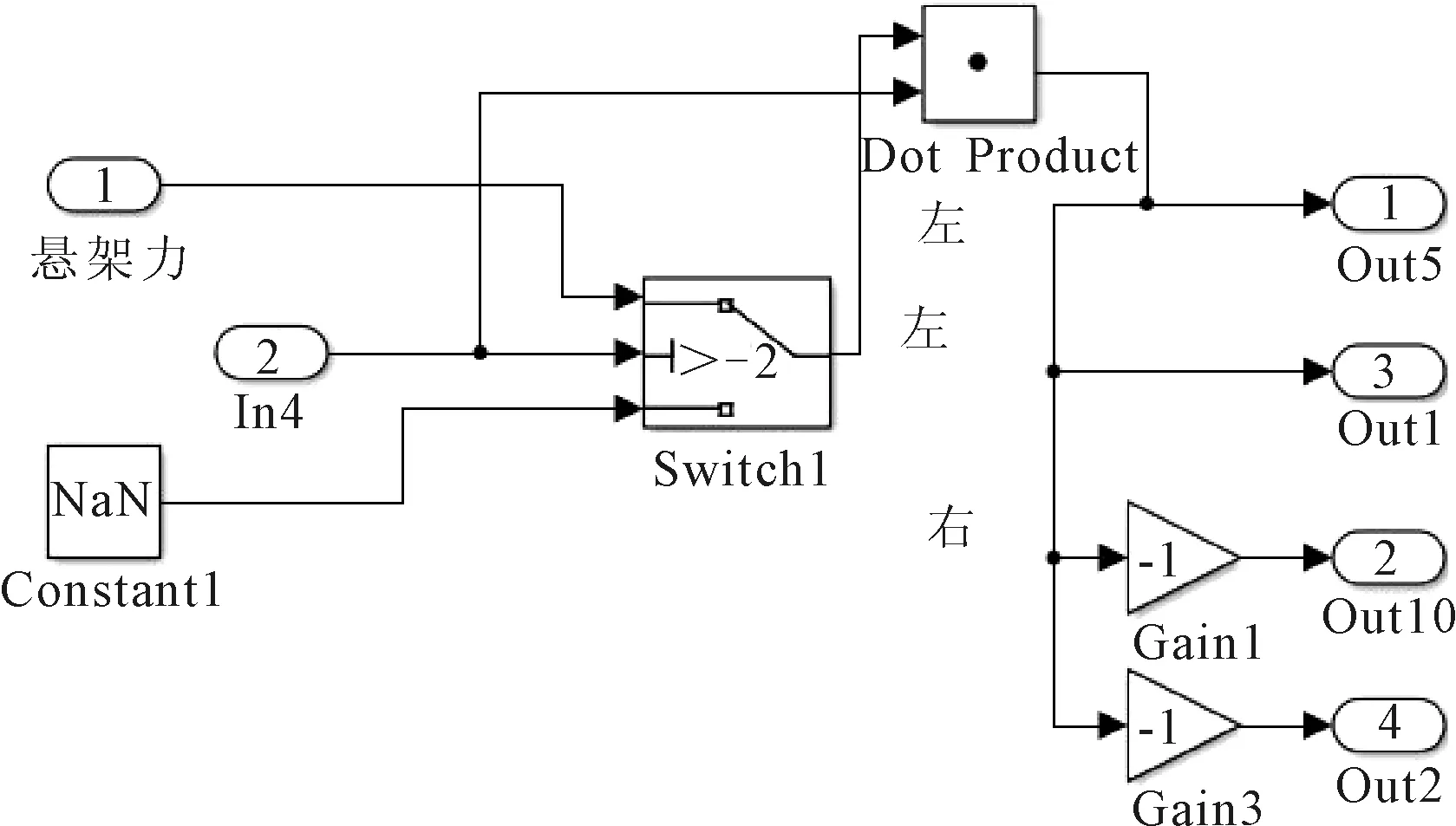
圖9 分配器子系統
控制器子系統分別為本文設計的PID控制器與模糊控制器,見圖10.
圖10 控制器子系統
3.2 魚鉤試驗工況的控制策略驗證
設定路面附著系數為0.85,車輛以80 km/h的初始速度行駛,魚鉤試驗工況的轉向盤轉角設置見圖11a),轉向盤輸入的最大值設置為300°.在魚鉤工況下,車輛在無控制、模糊控制、PID控制情況下的各性能指標的仿真結果對比曲線見圖11b).
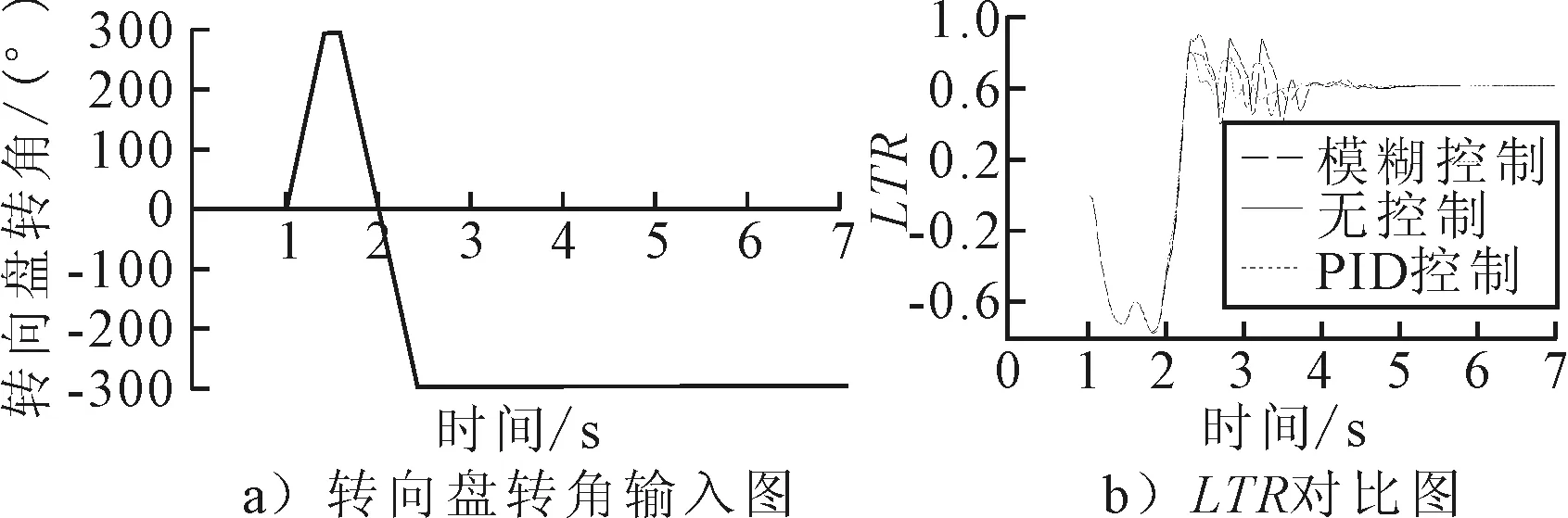
圖11 魚鉤試驗轉向盤轉角輸入和LTR對比圖
由圖11b)可知,無控制時車輛LTR的絕對值最高值已經超過側翻閾值0.8,可認定車輛即將發生側翻.當施加控制時,LTR絕對值維持在0.8以內,沒有超過側翻閾值.圖12a)為魚鉤試驗過程中車身側傾角的對比圖,由圖12a)可知,車輛在無控制的情況下,車身側傾角最大值達到6°左右.而在施加控制后,車輛側傾角的極值明顯小于無控制時,最終都穩定在4°左右.圖12b)為魚鉤試驗車身側向加速度對比圖,由圖12b)可知,本文所設計的兩種控制器都可以起到降低車輛的側向加速度的作用,PID控制在1.8 s左右開始降低側向加速度的最大偏差,并在3.2 s處率先控制車輛進入到穩定狀態,與無控制相比,過渡時間有明顯的減小.模糊控制的效果沒有PID控制效果好,但也可以更快地進入到穩定狀態.
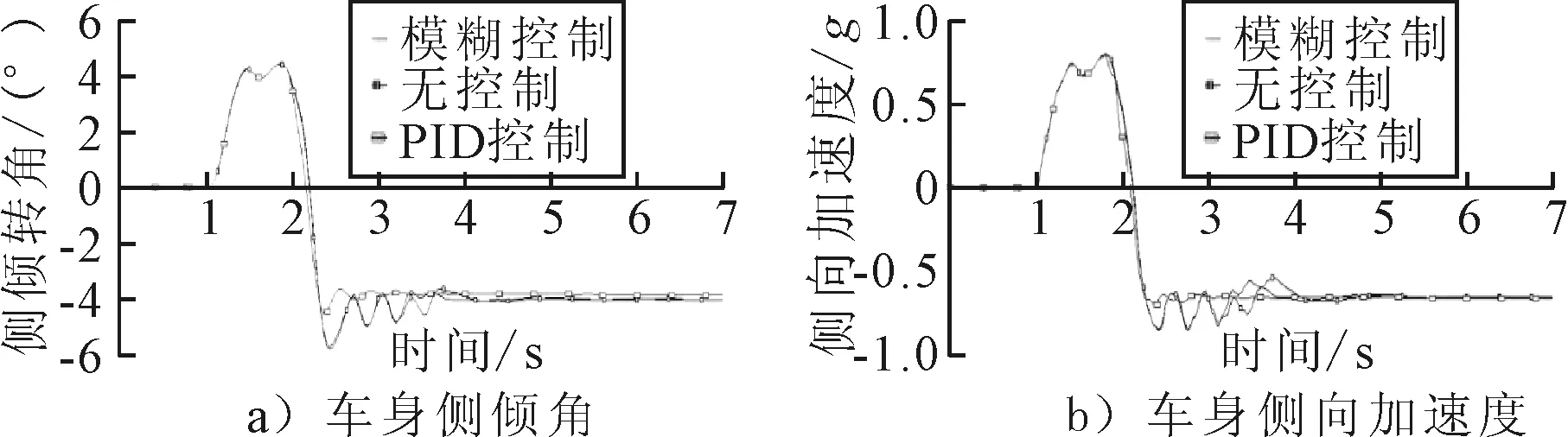
圖12 魚鉤試驗車身側傾角和側向加速度對比圖
3.3 雙移線試驗工況的控制策略驗證
設定路面附著系數為0.85,車輛以120 km/h的初始速度進行仿真試驗,雙移線實驗的轉向盤轉角設置見圖13a).車輛在無控制、PID控制、模糊控制情況下的各性能指標的仿真結果對比曲線見圖13b)和圖14.
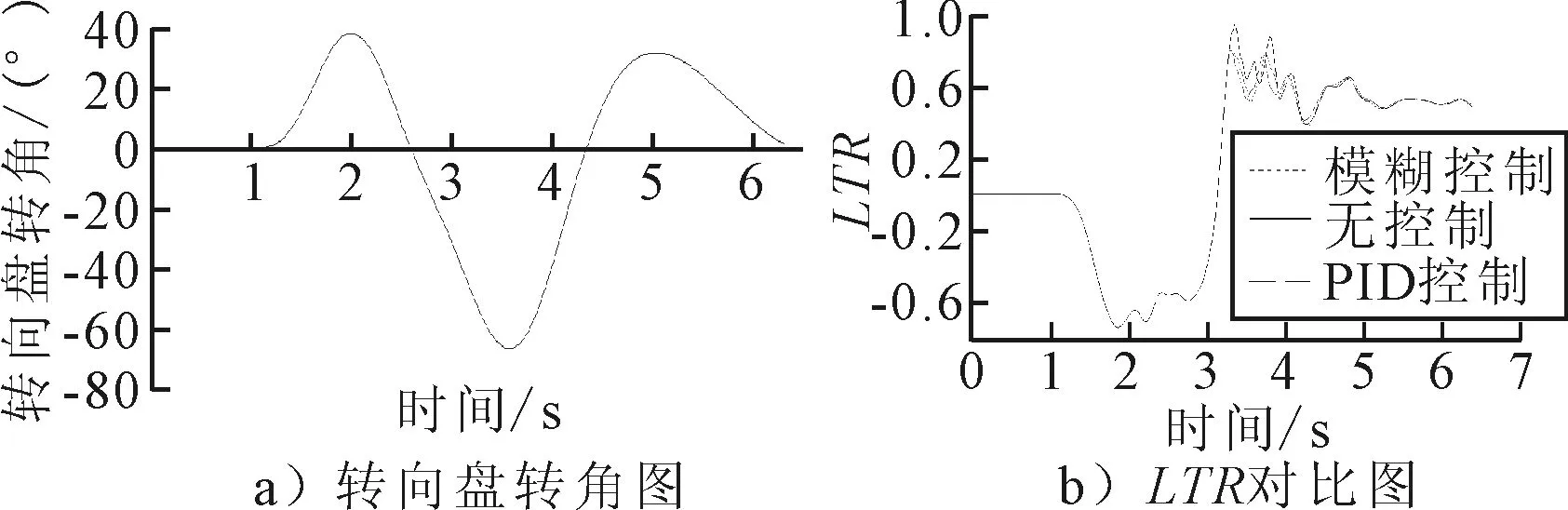
圖13 雙移線工況轉向盤轉角和LTR對比圖
由圖13b)可知,未施加控制時,LTR大約在3.3 s時超過了側翻閾值,車輛處于比較危險的狀態下,而施加控制后,LTR沒有超過本文設定的側翻閾值.其中,PID控制的效果更加明顯.
圖14a)為雙移線工況下車輛側傾角變化圖,由圖14a)可知,兩種控制方法都起到一定的矯正車身姿態的效果,大約在施加控制3.3 s后,控制器開始發揮作用,曲線波動幅度減小,最終將側傾角控制的4°以內.其中,PID控制效果優于模糊控制.圖14b)為雙移線試驗的側向加速度對比曲線.在3.3 s左右控制器開始發揮作用,側向加速度的波動范圍開始縮小,PID控制效果更加明顯,將側向加速度穩定在0.8g以內,模糊控制的振蕩量相比較大.
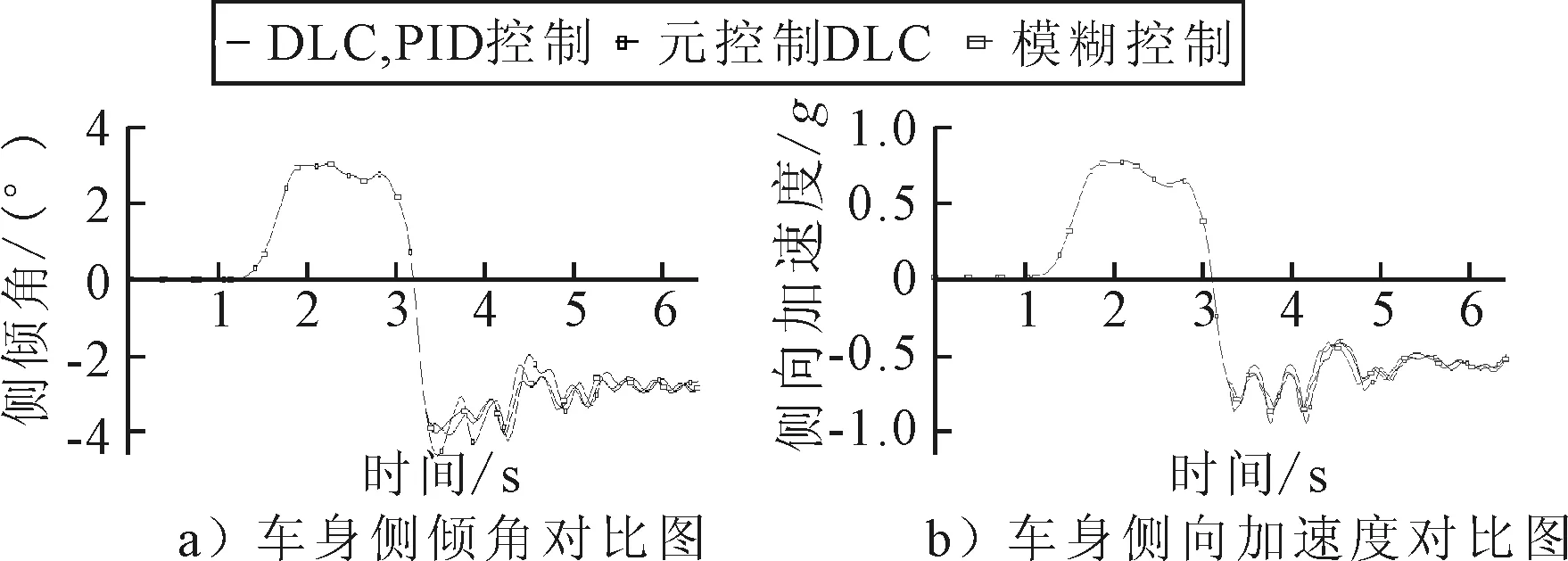
圖14 雙移線工況車身側傾角和側向加速度對比圖
通過魚鉤試驗工況驗證,施加主動防側翻控制策略在能夠在一定程度上對車輛在行駛過程中的姿態進行矯正,從而防止側翻事故的發生.
4 結 論
1) 在Carsim環境下,利用某型皮卡車參數,建立車輛防側翻控制用參數模型.
2) 設定橫向載荷轉移率LTR作為側翻閥值用于判斷車輛是否發生側翻,利用PID及模糊控制方法,建立基于主動懸架控制的車輛防側翻控制器.
3) 在Matlab環境下建立皮卡車防側翻聯合仿真模型,利用魚鉤及雙移線試驗,對本文所建立的控制器進行驗證.結果表明,本文所設計的控制器都將LTR控制在±0.8以內,并且能夠降低車身的側傾角和側向加速度.其中PID控制效果更加明顯,兩種試驗工況下均能夠將車身側傾角控制在4°以內,過渡時間更短,曲線更加平滑.
參考文獻
[1] 陳超,張玉新,鄧繼業,等.工程車輛乘坐舒適性研究現狀與關鍵技術[J].建筑機械,2012(1):71-75.
[2] 薛俊,胡燦,覃正海.汽車轉向側翻穩定性分析[J].裝備制造技術,2013,7(2):12-14.
[3] NAM K, OH S, FUJIMOTO H, et al. Direct roll moment control for electric vehicles based on roll angle observer and lateral tire force control [C]. 8th International Conference on Power Electronics-ECCE Asia ,Jeju,2011.
[4] ZONG C F, ZHU T J. Multi-objective stability control algorithm of heavy tractor semi-trailer based on differential braking[J]. Chinese Journal of Mechanical Engineering, 2012,25(1):88-96.
[5] 尹浩,趙又群,溫衛東,等.兩種輸入模型下的汽車逆問題分析[J].哈爾濱工業大學學報,2009,41(12):219-222.
[6] 徐哲,魏民祥.汽車穩定性控制系統模糊算法研究[J].機械科學與技術,2012,31(11):1791-1795.
[7] 趙偉,魏朗,杜峰.基于橫擺力矩的汽車制動穩定性模糊控制[J].長安大學學報(自然科學版),2008,28(6):77-80.
[8] YIM S J, KWANGKI J, KYONGSU Y. An investigation into vehicle rollover prevention by coordinated control of active anti-roll bar and electronic stability program[J]. International Journal of Control, Automation and Systems, 2012,10(2):275-287
[9] 廖聰,吳新燁,黃紅武,等.基于LMI的汽車主動懸架防側翻H∞控制[J].機械與電子,2014,31(2):43-46.
[10] 嚴世榕,嚴鐘輝.基于模糊PID的客車操縱穩定性控制研究[J].機械制造與自動化,2015,44(6):163-166.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36