船載三軸天線極化穩定技術研究
2018-07-06 06:08:48耿大孝張振莊
無線電通信技術 2018年4期
耿大孝,張振莊,劉 昕
(中國電子科技集團公司第五十四研究所,河北 石家莊 050081)
0 引言
國內在Ku、C等頻段的衛星通信的極化方式主要是線極化方式,信號載波通過水平、垂直兩種相互正交的極化實現極化隔離[1]。隨著我國衛星覆蓋區域由陸地近海向深海遠洋擴展,船載衛通站越來越多地需要采用國內線極化衛星作為中繼站構建遠程通信網絡,作為通信終端的船載天線需要具有跟蹤線極化衛星的能力。由于船體姿態角既影響天線電軸的空間指向,也對天線電軸形成旋轉效應,造成極化失配。較大的極化失配角會增大極化損耗,降低交叉極化隔離度,和同頻反極化信號構成收發相互干擾。為此船載衛通天線需要隔離船體姿態對天線極化的影響,保持天線地理極化角的穩定。
由于過去船載衛通天線跟蹤只關注天線電軸相對目標衛星的指向誤差,對極化穩定情況關注很少,一般不提供精度較高的實時搖擺角,因此過去船載衛通天線不采取極化穩定措施,只在兩軸座架的機載衛通天線上考慮到飛機轉彎時滾轉角較大,進行了機體搖擺角到天線電軸的擾動量計算和隔離[2],但由于擾動量沒有與極化角相對應,因此存在一定的計算誤差。
方位-俯仰-交叉式(即AEC)三軸座架因其可以實現高仰角過頂跟蹤同步衛星,是船載衛星通信天線常用的座架形式。本文結合機載兩軸座架極化搖擺擾動量計算公式,在船載三軸衛通天線上,綜合天線地理角、船體姿態角、天線甲板角,通過坐標旋轉變換,推導出對應于指定地理極化角的目標極化角計算公式,進而開發出船載天線極化穩定方法。
1 極化穩定方法研究
極化是指電磁波在傳播過程中電場矢量的方向,若電場矢量在與電磁波傳播方向垂直的平面內,則是線極化。地球同步衛星電場矢量方向與赤道平面平行時為水平極化,垂直時為垂直極化[3]。極化角一般是指水平極化角,在天線所在的地理平面內,同天線指向目標衛星的射線垂直的直線與赤道平面的夾角就稱為極化角,計算公式見下式。
θp=arctan(sinΔλ/tanφ),
(1)
式中,θp為極化角,Δλ為地球衛通站與衛星經度差,φ為天線緯度[4]。由式可知,極化角的數值只與地球站的經緯度、衛星的經度等因素有關。船載天線極化穩定的目的就是隔離船體姿態角對船載天線極化角的影響。
船載天線極化穩定方法研究的主要工作是推導出船搖條件下的目標極化角計算公式,本文應用歐拉旋轉方法按照慣性(地理)坐標系—甲板坐標系—天線坐標系的順序,結合地理角、姿態角、甲板角等各坐標系的特征值進行坐標旋轉,得出矩陣轉換等式,從而求出天線目標極化角。
1.1 坐標系
船搖對天線極化的擾動計算公式是通過各定位坐標系的旋轉推導求得,涉及到的坐標系說明如下[2]。
① 慣性(地理)坐標系(Og—XgYgZg)
原點Og在慣導基準中心,Xg軸平行于水平面指向正東,Yg軸平行于水平面指向正北,Zg軸鉛垂向上,Og—XgYgZg成右手正交坐標系。
② 甲板(船體)坐標系(Od—XdYdZd)
原點Od在船體質心,Xd軸平行于甲板平面指向右舷,Yd軸平行于甲板平面指向船艏,Zd軸垂直于甲板平面指向船桅,Od—XdYdZd成右手正交坐標系。
③ 天線坐標系(Oa—XaYaZa)
原點Oa在天線質心,天線質心與船體質心重合,Ya軸與天線電軸重合,Za軸平行于交叉軸并指向天線主面的上邊沿,Xa軸垂直于交叉軸與電軸構成的平面,Oa—XaYaZa成右手正交坐標系。
1.2 數學模型建立
船搖對天線極化擾動的推導是建立在天線對星指向轉動到位并且已經鎖定目標衛星的基礎上,忽略天線對星指向偏差,計算基于地理角、船搖角和天線座架各軸角得出的目標極化角,推導過程是天線的單位向量按照天線坐標系—慣性坐標系—甲板坐標系—天線坐標系的順序歐拉旋轉推導。
坐標正向轉換坐標軸的旋轉順序為Z軸—X軸—Y軸,反向轉換旋轉順序為Y軸—X軸—Z軸。
設天線矢量在天線坐標系中的表示為式(2),因為只分析極化角變化,所以假設只有Z軸方向有單位矢量。
(2)
由天線坐標系歐拉旋轉到慣性坐標系,轉換參數為天線指向的方位地理角、俯仰地理角和極化地理角,表示為A、E、P,坐標{X,Y,Z}先逆轉P角到坐標{X1,Y1,Z1},再下轉E角到坐標{X2,Y2,Z2},再逆轉A角到坐標{X3,Y3,Z3},轉換過程如圖1所示。
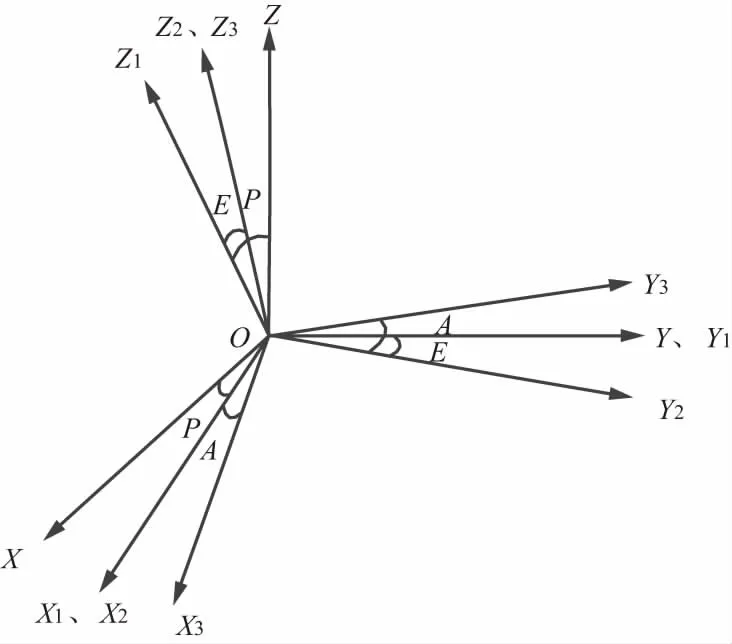
圖1 天線坐標到地理坐標轉換示意圖
極化地理角旋轉矩陣如式(3a)所示:
(3a)
俯仰地理角旋轉矩陣如式(3b)所示:
(3b)
方位地理角旋轉矩陣如式(3c)所示:
(3c)
由慣導坐標系轉換到甲板坐標系,轉換的旋轉示意如圖2所示。
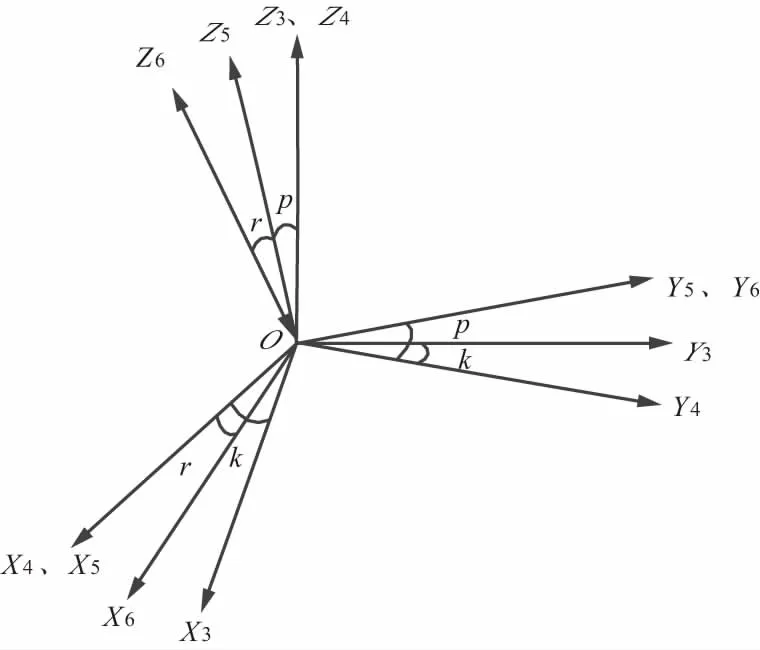
圖2 慣導坐標到甲板坐標轉換示意圖
轉換參數主要是航向、縱搖、橫搖三個姿態角,表示為k、p、r,轉換順序按照航向—縱搖—橫搖的順序。各矩陣說明如下:
航向轉換矩陣如式(4a)所示:
(4a)
縱搖轉換矩陣如式(4b)所示:
(4b)
橫搖轉換矩陣如式(4c)所示:
(4c)
甲板坐標轉換至天線坐標,轉換示意如圖3所示。
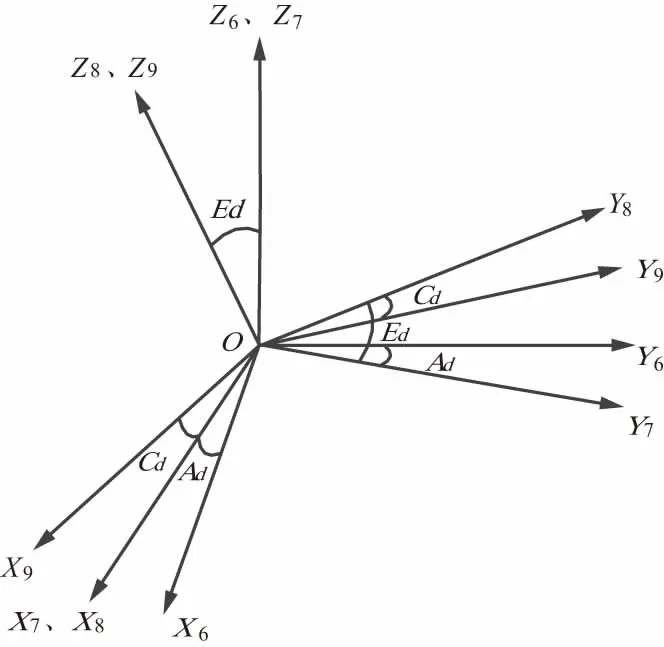
圖3 甲板坐標到天線坐標轉換示意圖
轉換參數主要是方位、俯仰、交叉三個甲板角,表示為Ad、Ed、Cd,轉換順序按照方位—俯仰—交叉甲板角的順序來旋轉。各矩陣說明如下。
方位甲板角轉換矩陣如式(5a)所示:
(5a)
俯仰甲板角轉換矩陣如式(5b)所示:
(5b)
交叉甲板角轉換矩陣如式(5c)所示:
(5c)
1.3 極化目標甲板角計算
設通過天線對星指向的矢量在各坐標系的順序轉換即可得到極化軸變量的最終結果。
將轉換過程中用到的轉換矩陣相乘[5],得矩陣等式如式(6a)所示:
(6a)
式中,X9為電軸在天線坐標系中Xa軸軸向的分量,Z9為電軸在Za軸軸向的分量,矩陣加上標T后為各矩陣的轉置矩陣。
設經船體姿態引出的目標極化角為Pd,Pd計算式為(6b):
Pd=arctan(X9/Z9)。
(6b)
1.4 極化穩定實現
船載衛通天線在對星跟蹤過程中,控制極化軸,使實測的實際極化角與實時計算的目標極化角保持一致,即可隔離船搖對天線極化的擾動,實現極化穩定功能。
2 應用分析
2.1 仿真計算
① 特征值計算
當俯仰地理角E= 90°,橫縱搖角和交叉甲板角為零,俯仰甲板角Ed=90°時,得出目標極化角Pd=P+A-k-Ad,即當天線位于星下點,船甲板水平狀態下,方位的剩余誤差只體現在對極化的擾動上;當只有橫搖角,其他旋轉變量都為零時,得出極化甲板目標角Pd=P-r,橫滾角造成了極化旋轉。
② 靜態驗證
將1.2 m Ku頻段船載三軸天線安裝在三軸搖擺臺上,由慣導提供搖擺臺的搖擺角。在天線完全對準線極化衛星狀態下,手動調整極化角使頻譜儀檢測到的反極化信號的強度最小,將調整后的實測極化角與目標極化角進行比較。改變搖擺臺姿態并重復前面的過程,以此來驗證公式的正確性,試驗用星信息如表1所示。
表1 試驗用星表
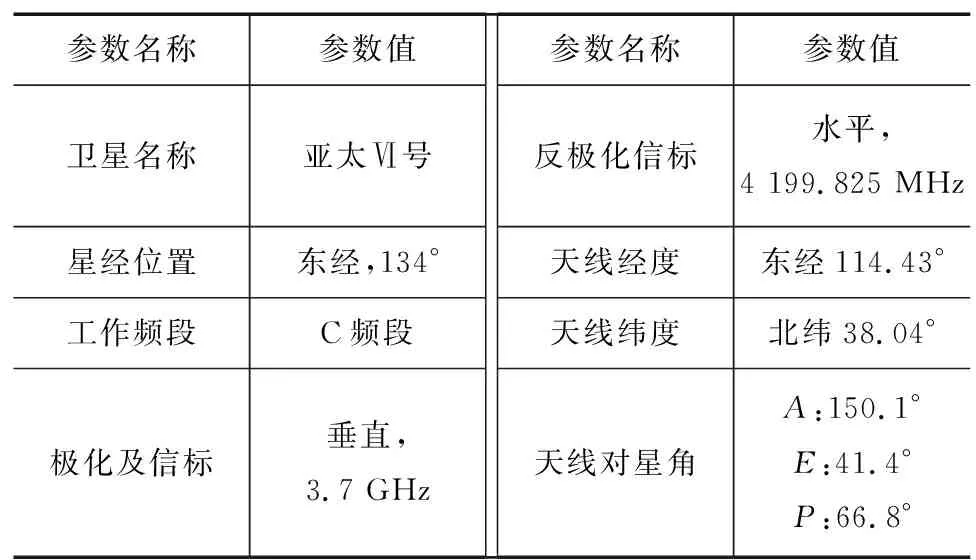
參數名稱參數值衛星名稱亞太Ⅵ號星經位置東經,134°工作頻段C頻段極化及信標垂直,3.7 GHz 參數名稱參數值反極化信標水平,4 199.825 MHz天線經度東經114.43°天線緯度北緯38.04°天線對星角A:150.1°E:41.4°P:66.8°
試驗中記錄了五組姿態角對應的天線各軸甲板角,記錄如表2所示。
表2 試驗記錄表(單位為°)
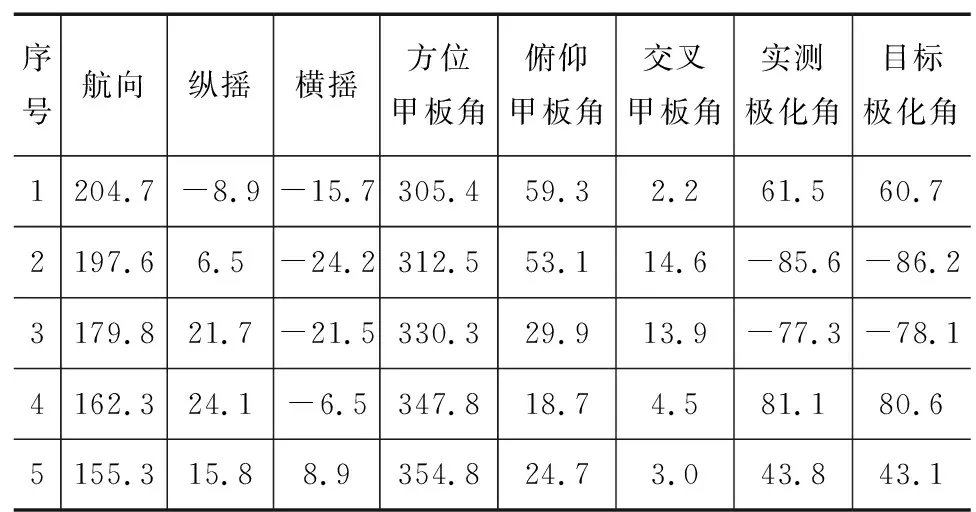
序號航向縱搖橫搖方位甲板角俯仰甲板角交叉甲板角實測極化角目標極化角1204.7-8.9-15.7305.459.32.261.560.72197.66.5-24.2312.553.114.6-85.6-86.23179.821.7-21.5330.329.913.9-77.3-78.14162.324.1-6.5347.818.74.581.180.65155.315.88.9354.824.73.043.843.1
極化實測角與極化計算角雖然存在一定的誤差,考慮到極化角的標校誤差和信號電平的測量誤差,該誤差基本可以忽略不計,因此認為該方法起到了極化穩定的作用。
③ 動態驗證
通過搖擺臺動態搖擺試驗,在天線伺服系統中進行有無極化穩定功能的反極化信號接收幅度的比較,確定在動態搖擺條件下,極化穩定隔離的效果。
船載天線在搖擺臺持續搖擺條件下對星實時跟蹤,采集天線應用極化穩定方法前后兩個時間段接收信號的電平值,繪制成圖形進行比較,從而確定在動態搖擺條件下極化穩定方法是否有效。
搖擺狀態下天線未采用極化穩定方法信標信號的電平變化如圖4所示。
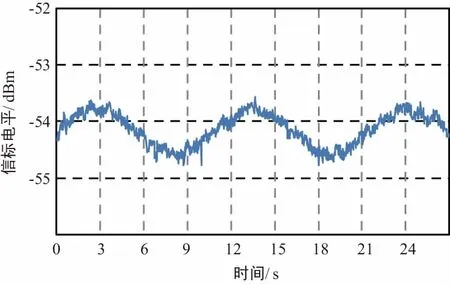
圖4 極化未穩定的信標電平圖
同一搖擺狀態下天線采用極化穩定方法后的信標信號的電平變化如圖5所示。
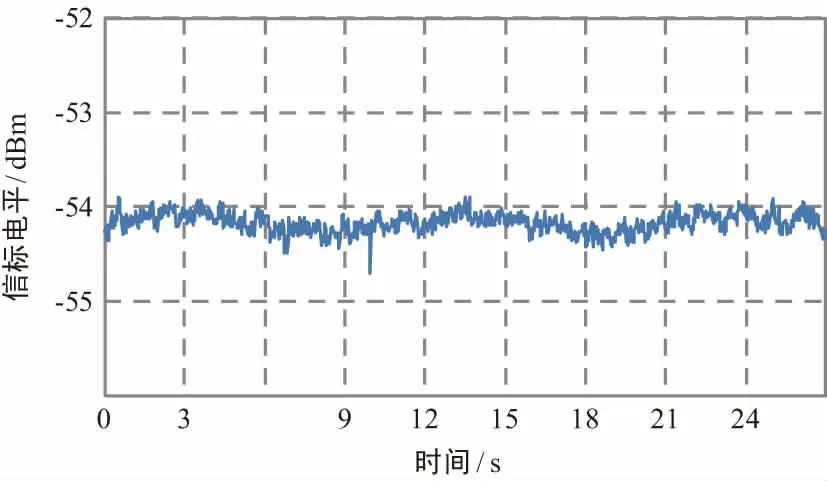
圖5 極化穩定后的信標電平
比較圖4和圖5表示的信標電平變化示意圖可見,兩圖都表現出了和搖擺同周期的變化,但加入極化穩定后的信標電平明顯比極化穩定前平穩。
2.2 實際應用
一艘航天測量船船載衛通天線采用AEC座架,在執行某次衛星發射任務的航渡期間,船載衛通天線跟蹤線極化衛星。船在星下點附近過赤道,衛通天線仰角較高,在沒有采取極化擾動隔離時,天線收發信號出現較大跌落,通信偶有中斷現象。
后來在伺服控制程序中依據該方法增加了極化穩定措施,在同一位置附近跟蹤同樣衛星,天線收發信號沒有出現明顯變化,從而判斷該措施有效地解決了問題。
3 結束語
通過坐標旋轉推導出目標極化角的計算公式,實現了天線對星極化在船搖條件下的穩定,避免了船體搖擺對船載衛通天線造成的極化干擾。目前,該極化穩定方法已應用于不同頻段和口徑的AEC座架的船載衛星通信天線中,而且都取得了很好的效果。同時通過坐標旋轉推導目標極化角計算公式的研究方法不僅適用于AEC三軸座架天線,還可以推廣應用在其他座架形式天線的極化穩定研究中。
[1] 王秉鈞,王少勇,田寶玉.現代衛星通信系統[M].北京:電子工業出版社.
[2] 李華.機載衛星通信天線極化軸的穩定分析[J].現代電子技術,2002(11):47-48.
[3] 張印相.衛星直播數字電視[M].北京:中國標準出版社,2011.
[4] 林培通.衛星接收極化角計算公式的推導[J].寧德師專學報(自然科學版),2004,16(4):400-402.
[5] 張凱院,徐仲.矩陣論[M].北京:科學技術出版社,2013.
[6] 蔡國新,張濱,伍宗偉,等.關于極化角計算的研究[J].無線電通信技術,2009,35(5):37-38.
[7] 梁國,王建.一種共形天線陣支架的結構設計與仿真分析[J].無線電通信技術,2016,42(1):65-68.
[8] 王道平,陳輝華,何敏.“動中通”接收天線極化匹配及跟蹤技術研究[J].現代電子技術,2009(12):103-105.
[9] 徐崇彥,張言鋒,孟祥國.Ka頻段低軌衛星跟蹤技術研究[J].無線電通信技術,2017,43(6):56-59.
[10] 馬利華,胡超,毛新宏,等.衛星通信地球站天線的線極化角計算研究[J].天文研究與技術,2016,13(4):428-432.
[11] 單福悅,凡嵩,岳建,等.基于多波束陣列天線的目標快速捕獲方法[J].無線電工程,2016,46(4):60-62.
[12] 杜彪,伍洋,張一凡,等.大口徑反射面天線技術綜述[J].無線電通信技術,2016,42(1):1-8.
[13] 崔立廷.一種海面定向天線自動跟蹤系統[J].無線電通信技術,2016,42(3):55-58.
[14] 孟景濤,吳海洲,王志國.一種電波束和機械軸結合的綜合跟蹤方法[J].無線電工程,2016,46(8):70-73.
[15] 瞿元新,黃國雄.航天測量船測控通信設備船搖穩定技術[M].北京;國防工業出版社,2009:38-82.
[16] 王宇,黃旭峰,楊阿華.衛星導航轉臺天線組合跟蹤方法研究[J].無線電工程,2017,47(6):41-44.
[17] 胡洋,彭曉樂,王宏宇.半捷聯式穩定平臺隔離度影響因素分析[J].電子設計工程,2010(5):72-75.
[18] 劉會鋒,李艷梅.車載天線指向精度的研究[J].無線電工程,2018,48(4):319-323.
