超大尺寸沉井不排水下沉及封底水下三維機械聲吶應用研究
2018-07-23 06:33:38中國鐵路上海局集團有限公司南京鐵路樞紐工程建設指揮部
上海鐵道增刊 2018年2期
李 冰 中國鐵路上海局集團有限公司南京鐵路樞紐工程建設指揮部
魏湛力 中交二航局第四工程有限公司
水下工程的施工質量主要取決于施工期間的監測和水下測繪。水下工程完成后,水下結構將隨著地形的變化而在一定程度上進行調整。利用水下工程檢測技術,一方面可以在施工過程中發現問題,從而采取必要的維護和加固措施。避免因發生隱患或缺陷而發生惡性工程質量事故,確保工程施工質量;另一方面,可以對已完成的水下工程進行后期觀測,以檢測隨著項目年齡增加可能發生的結構衰減甚至惡化,材料變質或水下結構老化。為建設方采取相應措施提供依據。
通過采用合理的水下檢測方法或手段,技術人員能夠準確把握實際情況,并采取措施。避免漏處理和不必要的處理。
本世紀初,水下工程檢測技術得到很大發展,先后開發了一系列先進,高性能的水下檢測設備。如水下電視,側掃聲納,磁力計,淺剖面儀,按原理可分為光學,聲學,磁力探測,水下機器人等技術。
隨著沉箱基礎向較大的平面和較深的方向迅速發展,大型沉箱呈現出與中小型沉箱不同的下沉和密封方法,首次將水下聲納成像掃描測繪技術應用到沉井下沉、封底施工中。
1 工程概況
五峰山長江特大橋北錨錠沉井基礎長100.7 m、寬72.1 m、高56 m。沉井總計共分10節,第1節為鋼殼混凝土沉井、高8 m,第2節至10節為鋼筋混凝土沉井,其中第2節高6 m,第3節至8節高均為5 m,第9節高4 m,第10節高8 m。沉井封底混凝土厚為12 m。沉井頂面標高為+1.0 m,基底標高為-55.0 m,基底置于砂層中。
沉井采用矩形截面,標準壁厚2.0 m,隔墻厚1.3 m,中間共設置48個(10.2×10.9)m的矩形井孔。沉井構造見圖1。
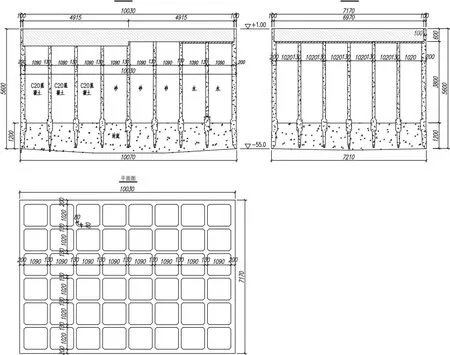
圖1 北錨碇沉井構造圖(單位cm)
2 常規方式測量泥面標高
2.1 測量方式介紹
沉井下沉過程中各擬定工況下對刃腳埋深及泥面標高有嚴格要求,首先需通過設備自身控制泥面狀態,然后通過測量手段監控泥面狀態。
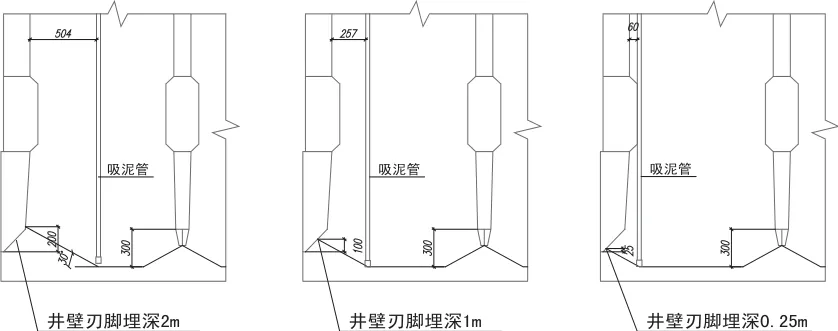
圖2 直吸泥管刃腳埋深控制圖示
(1)吸泥深度控制
空氣吸泥管為無縫鋼管,吸泥管的長度均一致,吊點設置均一致,梅根吸泥管均設置刻度標尺。龍門吊尺寸、大鉤均一致。以沉井頂面平臺為參照,可通過吸泥管下放深度來控制吸泥面,此過程由操作人員進行控制,現場技術人員進行旁站監控(見圖2)。
(2)刃腳埋深控制
直吸泥管無法直接吸到刃腳土,需根據吸泥深度及鍋底狀態控制刃腳土埋深,在假定的吸泥深度下,通過控制吸泥管與井壁間距來調控泥面鍋底形狀,確保刃腳埋深。
彎頭管在沉井終沉階段使用,可直接吸到刃腳土,以吸孔刃腳土為目的,彎頭管的走向需提前做好標識(見圖3)。
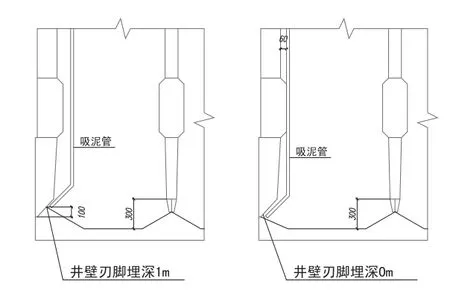
圖3 彎頭吸泥管刃腳埋深控制圖示
(3)泥面標高監測
現場采用人工用測繩定時測量井壁及隔墻刃腳泥面標高,另外需保留支撐的隔墻及井壁位置處布置有土壓力盒,根據土壓力情況也可判斷支撐情況。人工測量無法準確判斷刃腳埋深情況,受沉井第二節剪力鍵的影響,測點的泥面標高比刃腳位置的泥面標高要低,以此數據代表刃腳埋深偏安全。每個井艙布置8個測點,共計384個點,監測頻率為1次/6 h,并根據現場開挖功效做對應調整(見圖4)。
傳統測繩法采集數據工作量繁重,且測繩測量時只能測具有代表性的角點及壁面中點,在指導施工中基本都是以點代面,只能進行邊角的粗略控制,如要測量沉井隔艙中間區域底面狀態,需要用人工用吊籃連續打點測量;測繩法誤差較大,無法判斷沉井底面狀態,不能達到精細化、可視化指導施工。設備自身控制標高,測點受限,難以全面檢測泥面標高。水下聲納成像掃描測繪技術能有效解決傳統方法的局限性,降低安全隱患。
2.2 水下聲納成像掃描測繪技術
三維圖像聲吶是一種通過靜態機械掃描模式進行作業的高精度三維成像聲學設備,該設備可以通過側舷安裝或者坐底兩種方式進行作業,目前廣泛應用于航道整治、橋梁樁基和大壩等水下檢測中。代表性設備有Blue view 5000。對采集的數據采用專業軟件Proscan、Cyclone、Autodesk Recap等進行拼圖和除噪,最后得到三維點云立體圖像,該監測方法誤差在厘米級。
2.3 水下三維機械掃描聲吶應用
(1)選擇未施工沉井隔倉2,進場之前,確定現場施工情況。該隔倉內水深最深達到55 m~60 m之間,國內現有三維聲吶數據線纜長度在40 m~45 m左右,需對現有數據線纜進行測試,確定其數據傳輸參數并接長硫化,在60 m水深范圍內進行測試達到預期效果。其次,現場缺少聲吶監測平臺及升降設備,將工人吊籃改造成聲吶監測工作平臺,便于聲吶下放和回收。將沉井塔吊作為升降設備,通過塔吊合理布置測點,規避附近井艙施工造成的影響和風險。若沉井隔倉2周圍沒有施工則井底滑坡掩埋設備風險較小可以采用坐底方式監測。若沉井周圍有施工,針對井壁四周有活動平臺的特點,采用三根繩索連接井壁并固定設備支架,將聲吶設備倒放入水(見圖5)。
(2)每天監測之前,依據現場施工安排,確認需監測沉井隔倉2,將監測平臺及塔吊準備到位,準備4根70 m繩子(單根載重量40 kg以上),70 m以上電源線、空開插板、穩壓器。連接三維聲吶設備,將設備調試到位,確保正常工作。
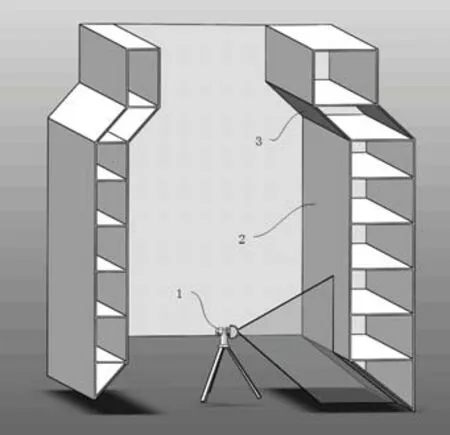
圖6 球形掃測示意圖
(3)采用坐底或倒放方式將三維機械掃描聲吶1設備放入水下,發射頻率為1.35 MHz,聲速設置在1 470 m/s左右,聲吶對隔倉內水下結構發射聲吶信號。沉井隔倉2尺寸10 m×10 m,將信號范圍設置在0.4 m~15 m之間。選擇球形掃描模式,通過終端軟件設置掃描速度,一般采取0.5°/s或1°/s,水平方向可掃描360°,豎直方向可設置四個角度分別為+45°、+15°、-15°、-45°。每次掃測固定豎直方向角度,水平方向旋轉360°,掃測一圈所用時間為6 min或12 min。球形掃測示意圖如圖6所示。
(4)對采集的數據采用專業軟件Proscan、Cyclone、
Autodesk Recap等進行拼圖和除噪,最后得到三維點云立體圖像,該監測方法誤差在厘米級。該方法是現有公知技術,本領域技術人員均知曉具體如何操作,在此不再贅述。作為示例:采用Autodesk Recap軟件,大致操作流程如下,首先打開Recap程序點擊主頁面中的“掃描項目”選項,在彈出的窗口中選擇新建項目,選擇需要導入的三維點云數據文件,文件格式后綴為XYZ,導入文件成功后,即可點擊“啟動項目”,進入數據后處理窗口;然后在后處理窗口中,通過“顏色模式”、“照明設置”、“點云設置”、“圍欄”、“限制框”等功能對點云數據進行縮放、調色、旋轉、除噪、剪切等,使點云數據干凈合理便于觀察和測量;最后完成數據處理后,將文件導出為PTS格式,將點云數據PTS后綴改為XYZ,用BLUEVIEW看圖軟件打開進行觀察、測量、分析。
由于每個沉井隔倉2中剪力鍵3到刃腳的高度為8m,可以量取泥面到剪力鍵3的高度得出整個隔倉內部任意點的泥面高程。
沉井下沉底部吸泥工序中,該方法監測圖及判斷如下:
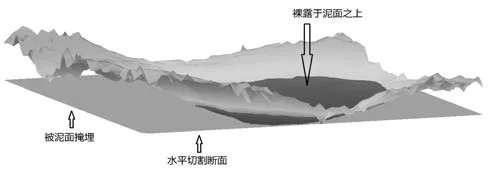
圖7 三維點云立體圖像斷面典型示意圖
如圖7所示,從圖中可以實時了解施工中各艙泥面分布,合理布置吸泥區,同時可以精確量取各泥面高度,判斷刃腳和隔墻埋深。圖7為立面狀態下的三維點云立體圖像,圖中可以直觀看到淺色區域的隔倉壁上存在一條深色的分界線,該分界線即為沉井隔倉2中剪力鍵3位置,即為該方法中所定義的特征高度;而放大觀察隔倉壁圖像和泥面圖像,兩者圖像特征差異明顯,也會存在一個明顯的分界線,該分界線即為隔倉壁和泥面的交界線,在該交界線上取2點,并獲得該2點到特征高度的距離5.642 m和6.149 m,即圖8左部分存在一定的堆積,再將剪力鍵3到刃腳的高度分別減去這2個距離,即可得到這2點的刃腳埋深。同理,可以獲得泥面任一點到特征高度的距離,從而根據這些數據的均勻程度判斷泥面的分布和平整度,均勻也就也平整,反之則越不均勻就越不平整。
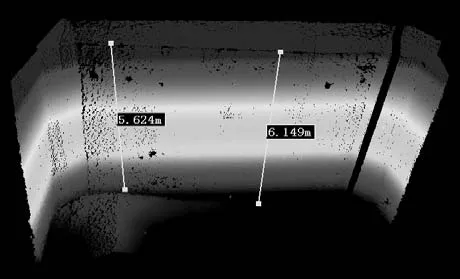
圖8 隔艙刃腳泥面分布圖及泥面高度測量
碎石找平層和水下封底混凝土施工工序中,監測方法及判斷與泥面監測類似,同樣可以獲得碎石層面、混凝土面任一點到特征高度的距離,從而根據這些數據的均勻程度判斷頂面的分布和平整度,越均勻也就越平整,反之越不均勻越不平整。
3 結束語
五峰長江特大橋北錨碇沉井不排水下沉、封底施工,首次采用了三維機械掃描聲吶監測方法,克服了傳統測繩法中的缺點,通過水下成像能夠看到整個沉井隔倉底面及井壁的狀態,可以判斷刃腳埋深及懸空狀態,碎石找平層及水下混凝土是否填充到位;采用該監測方法能夠減少測量人員、減少數據采集的工作量、縮短數據采集時間、減小測量誤差,可以精確化、可視化指導施工,能夠全面的掌握沉井底面狀態。尤其是在下沉困難或沉井入巖時,不再需要潛水員下水探摸,避免了由此帶來的安全隱患。在施工間歇中進行水下監測,對施工中出現的問題進行迅速糾正和調整,避免出現安全和質量事故。本監測方法還具有檢測精度高,速度快,操作簡單,成本低等優點,能夠精確化、可視化、科學化的指導施工,促進了沉井下沉水下監測技術的革新。此工程經驗可為其他類似工程提供借鑒和參考。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34