一種全自動下車支腿調平系統
2018-07-24 03:45:16蘇亮熊憶段娟香艾國棟
專用汽車 2018年7期
關鍵詞:檢測
蘇亮 熊憶 段娟香 艾國棟
長沙中聯消防機械有限公司 湖南長沙 410300
1 前言
在分秒必爭的火災救援現場,消防設備快速進入工作就緒狀態,對于提升救援效率,減少損失,意義重大。裝備一鍵式自動操作系統能夠減少操作步驟,同時,高效、穩定的自動操作過程也可以節省人工操作的耗時,減少動作完成時間,從而提升整體功能的易用性、快速性,具有積極的意義。
2 現有車輛下車支腿調平系統
目前,現有的車輛下車支腿調平方式有兩種,手動調平方式和自動調平方式。其中,手動調平的方式耗時長,依賴熟練的操作人員,不利于提高消防作業效率。
自動調平的方式也有如下問題:
a.車身本身存在變形,調平結束后,下車實際平整度得不到保證;
b.在不同的路面情況下,自動調平適應能力弱,有可能出現垂直油缸到底后無法結束調平的情況;
c.調平結束后,四個垂直支腿雖然觸地,但是各支腿如果只是觸地,而不是均衡承受車身質量,在上裝轉動時,質心變化會導致各支腿受力的變化,弱支撐支腿很可能因為受力進一步減小而離地,造成虛腿的現象,影響整車安全性。
針對上述諸多問題,筆者設計開發了一種全面優化的下車自動調平控制系統,通過改進檢測方式及判定條件,運用分步調節結合模糊PID控制的調平方法,并結合支腿反力的修正調節,全方位地提升自動調平的實際效果,通過對試驗車調試與測試結果分析,驗證了該系統的可靠性。
3 自動調平系統的構成
常見的支腿設計結構如圖1所示,自動調平系統通過對支腿的伸出、收回狀態以及車輛的傾斜程度進行實時檢測,用控制器控制各支腿閥的動作,并對調平結果進行自動判定。
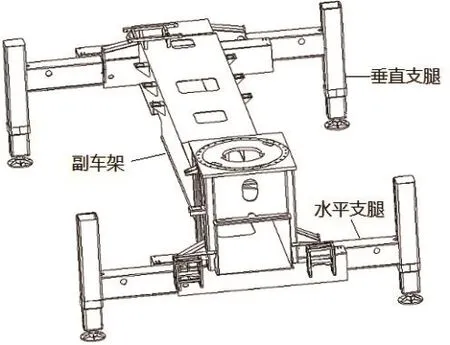
圖1 常見支腿結構
整個控制系統的構架如圖2所示。

圖2 下車自動調平控制系統框圖
系統為了解決車身形變造成傾角檢測數據不準確的問題,在車身前側增加單軸傾角傳感器,如圖3(b)中X2與X1一起,用于檢測左右側車身傾斜角度。車輛前側X方向調平參考X2數據,后側X方向上的調平參考X1數據,由于兩個傳感器分別安裝在副車架距離支腿很近的位置,檢測數據受車架變形扭曲的影響很小,確保了數據的準確性,從而規避了車架變形帶來的傾角誤差,保證了調平后支腿的平整度。
同時,將壓力傳感器替代接近開關,作為垂直支腿伸出到位的檢測方法,如圖3(b)中支腿末端四個黑色區域所示,壓力傳感器不僅可以判定支腿是否觸地,同時也能夠檢測支腿的受力大小。本系統利用壓力信號,在自動調平角度誤差滿足判定條件后,再對受力最小的弱支撐腿實施微調的伸出控制,提高弱支撐支腿的受力數據。此方式對車身角度基本無影響,卻能夠有效地改善三點強支撐的情況,為上裝的動作提供了穩定的支撐。

圖3 雙傾角傳感器及反力檢測設計
4 自動調平系統的控制策略
系統采用分步驟的調平方式,將自動調平分為五步,步驟如下:第一步,伸水平支腿,將支腿伸出到位;第二步,伸垂直支腿,將支腿伸出觸地;第三步,粗調平,快速通過傾角傳感器的X軸和Y軸來調節其中兩或三個支腿實現車身的基本水平;第四步,輪胎離地,撐起所有的支腿,直到輪胎離地;第五步,精調平,通過傾角傳感器的X軸和Y軸來調節其中的三個或者兩個支腿,將車身精準調整至設定水平。
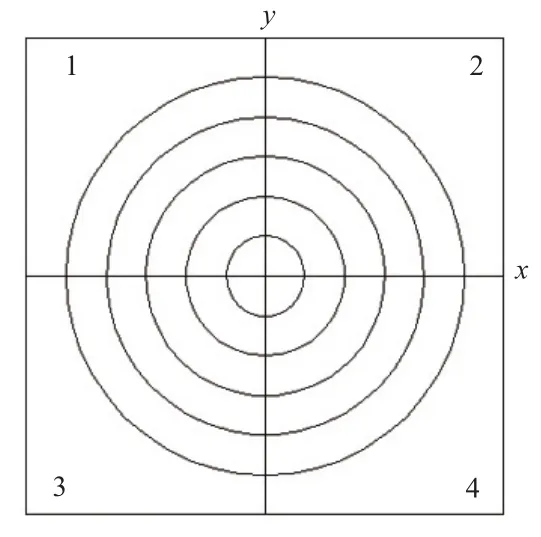
圖4 車身傾斜四區間
如圖4所示,通過分析雙軸傾角傳感器的X軸和Y軸的輸入信號可以把車身平面分為四個區間,如當檢測到X<0且Y>0時,程序判斷車身向1區傾斜,以此定義后續流程中X、Y軸方向的正負。本方案中,定義前高后低為Y軸正向,右高左低為X軸正向,反之為負向。
整個車身調平的過程包括伸水平支腿、伸垂直支腿、粗調平、輪胎離地、精調平,整體工作流程如圖5所示。
各垂直支腿觸地后,都將停止動作等待所有支腿觸地,當系統檢測到水平支腿、垂直支腿伸出到位后,開始執行粗調平。調平過程中,任意一個支腿的伸出都將影響X軸和Y軸方向的角度數據,同時按照圖4中所表述的傾斜區間判定車身所處區間,對四個支腿進行單獨控制。
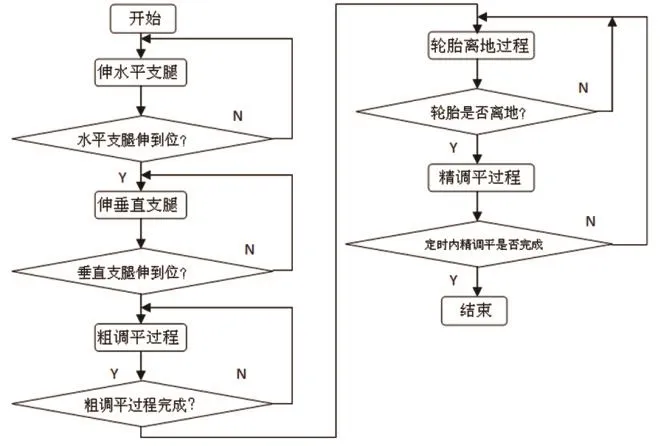
圖5 調平控制流程
由于四個支腿中任一支腿的動作都將對車身角度產生影響,從而影響其他三個支腿的輸出數據,因此,四個支腿同時動作的屬性決定了彼此之間互為干擾,而單純的PID控制器依賴精確的數學模型,在數學模型不精確的情況下,將降低系統控制性能,同時無法很好地控制超調[1]。使用過程中,往往會將支腿撐得太高導致油缸達到行程極限無法完成調平。針對這種情況,引入模糊PID控制算法。模糊控制是基于模糊集理論、模糊語言和模糊邏輯推理的一種智能控制方法。模糊PID控制是將模糊理論應用到PID控制系統中,從而構成模糊PID控制器[2],用于控制調平過程中出現過調的現象,同時保證調平的快速性。在粗調平和精調平的過程中,應用模糊PID調節方法,并設置不同的誤差允許值。
同時,在輪胎離地過程中,為了保證輪胎離地信號,保證每一個支腿至少以一定的速度撐起,精調平時,將下車調平的允許誤差加入判斷,允許誤差設置為±0.5°,只有當兩個軸向的誤差都小于允許誤差,才能判定下車調平,最后檢測四個支腿反力數據,對支腿反力最小的支腿進行單腿伸出控制。
5 試驗分析
以53 m云梯消防車作為試驗對象,并采集下車調平相關的傾角及垂直支腿閥開口等數據,通過人工操作、常規自動調平、改進自動調平的方式采樣數據并進行效果的比對。試驗用53 m云梯消防車如圖6所示。

圖6 試驗用53 m云梯消防車
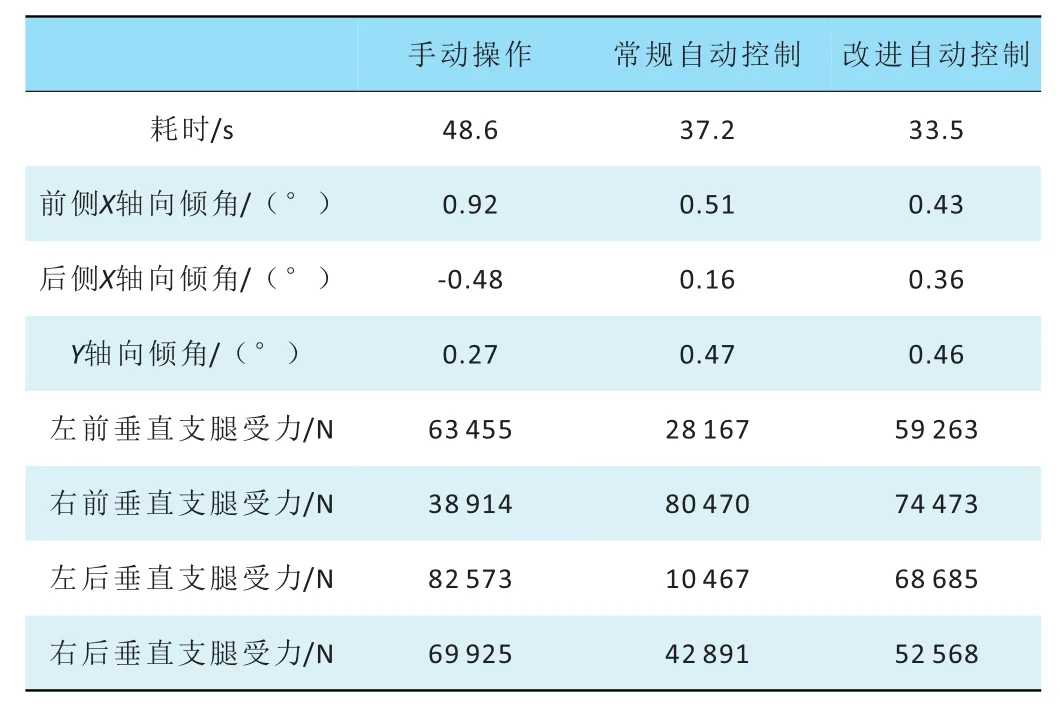
表1 第一組試驗對比數據

表2 第二組試驗對比數據
從兩組試驗的對比數據如表1、2所示, 從表中可以看出,手動操作模式通過人推動機械手柄桿操作支腿動作,由于不能同時自如地操控幾個支腿,調平耗時較長,且調平后整車平整度無法保證,為了保證精度則需要更長的調整時間。常規自動控制模式第一組調平完成后,單個支腿弱支撐的現象明顯,對上裝的動態穩定性支持較弱;第二組測試時出現了調平不成功的現象,暴露了控制算法的缺陷,可靠性較低。而改進的自動調平模式在時間、精度、受力均勻性上都有很好的效果。
再對比兩種自動調平的過程,如圖7所示。為了方便數據比對,實現時間軸同步,將傾角數據及支腿PWM值列入同一張表中,為了方便觀察,僅選取一組X軸數據,觀察調平角度變化。圖7中,X、Y軸零點在1 000附近,視為調平目標值。從圖7可以看出,在調平開始時,水平支腿伸出引發質心的變化導致X、Y軸數據的波動;12 s左右,水平支腿伸出到位,四個垂直支腿伸出;25 s左右,支腿觸地開始調平,后續調平過程中,X軸方向出現過調的現象,四個支腿控制電流波動較大。

圖7 常規自動調平數據
圖8顯示采用模糊PID控制方法的調平,圖中后段可以看出,整個車身撐起過程穩定,粗調平、精調平過程中各支腿控制電流曲線平滑,X、Y軸數據能夠快速趨近零點值,且相比常規調平方式,耗時更短。
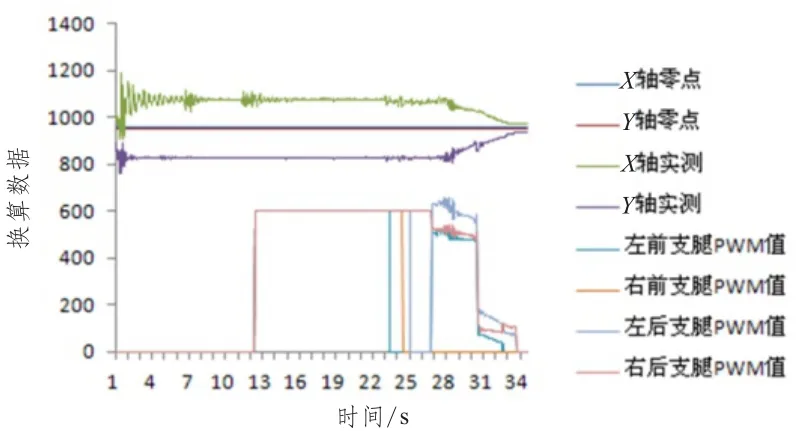
圖8 改進算法控制調平數據
6 結語
本文設計了一種全面的支腿全自動調平控制系統,設置兩個傾角傳感器檢測車身角度,解決了車身形變導致檢測誤差對調平精度的影響;采用分步式模糊PID調平控制策略,將整個過程分成五步,在垂直支腿調平過程中,逐級將車輛調整至目標狀態,最后,在不影響車身角度的前提下,輔助以支腿反力數據,對弱支撐垂直支腿進行單獨微調整。相較于常規方法,本系統具備調平實際精度更高、調整時間更短、過程平穩、地面條件適應能力更強、一次調平成功率更高、支撐更可靠等多種優點。同時,本方案并不局限于消防車的應用場景,可以滿足任何需要配備自動調平功能的支撐平臺,具備較高的應用價值。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
