基于Cell-DEVS 的森林滅火資源調(diào)度狼群優(yōu)化算法
2018-07-25 07:41:54陳愛斌周國雄
計(jì)算機(jī)應(yīng)用 2018年5期
李 斌,陳愛斌,周國雄*,周 濤
(1.中南林業(yè)科技大學(xué)計(jì)算機(jī)與信息工程學(xué)院,長沙410004; 2.湖南省林業(yè)廳森林消防航空護(hù)林站,長沙410007)(*通信作者電子郵箱51840157@qq.com)
0 引言
當(dāng)發(fā)生森林火災(zāi)時(shí),制定合理的滅火應(yīng)急調(diào)度方案是管理森林火災(zāi)、減少經(jīng)濟(jì)損失的重要內(nèi)容。由于林火行為很難進(jìn)行定量分析和描述,在一些不均勻的離散時(shí)刻點(diǎn)上其狀態(tài)時(shí)常發(fā)生變換,具有不可預(yù)見性,且狀態(tài)變換的內(nèi)部機(jī)制比較復(fù)雜,無法用常規(guī)的數(shù)學(xué)方程進(jìn)行描述,使得調(diào)度力量在全局控制與局部優(yōu)化平衡方面難以把控,是一種具有NP難特性的組合優(yōu)化問題。
文獻(xiàn)[1]為提高全局搜索能力,采用一種集成遺傳算法(Genetic Algorithm,GA)和粒子群優(yōu)化(Particle Swarm Optimization,PSO)的混合智能算法,建立了一種應(yīng)急調(diào)度模型,提高了群體搜索性能,但針對(duì)大計(jì)算量問題,局部尋優(yōu)能力不足;文獻(xiàn)[2]針對(duì)資源調(diào)度過程中的局部尋優(yōu)問題進(jìn)行改進(jìn),提出了一種多目標(biāo)混合差分進(jìn)化粒子群調(diào)度(Multiobjective Hybrid Differential-Evolution Particle-Swarm-Optimization,MHDP)算法,但是在多峰搜索調(diào)度中,容易陷入局部最小,從而丟失了種群的多樣性。此外,無論是PSO還是MHDP算法都忽視了資源之間的信息共享,對(duì)資源有效利用率的提升沒有顯著效果。文獻(xiàn)[3]將網(wǎng)格模型與調(diào)度算法結(jié)合,引入預(yù)測(cè)機(jī)制推斷網(wǎng)格任務(wù)大小情況,提出了基于標(biāo)準(zhǔn)差與二次分配網(wǎng)格的調(diào)度算法,從全局搜索調(diào)度角度,提高了計(jì)算能力。文獻(xiàn)[4]與文獻(xiàn)[5]是針對(duì)森林消防調(diào)度問題較為成熟的研究成果,但都僅限于從全局搜索調(diào)度考慮,忽視了局部細(xì)節(jié):文獻(xiàn)[4]提出了一種集成模擬與優(yōu)化控制火災(zāi)的DEVS(Discrete Event System Specification)-FIRE方法,采用DEVS-FIRE計(jì)算火勢(shì)蔓延參數(shù)并結(jié)合火災(zāi)消防管理行為,生成消防資源調(diào)度計(jì)劃;文獻(xiàn)[5]在文獻(xiàn)[4]研究基礎(chǔ)上,研究了直接攻擊、間接攻擊、平行攻擊三種森林滅火資源調(diào)度策略,結(jié)果表明:采用火前鋒直接攻擊調(diào)度戰(zhàn)術(shù)效果最佳,用時(shí)最短,其次為平行攻擊調(diào)度戰(zhàn)術(shù),但無論哪種戰(zhàn)術(shù),均沒有沒有將資源進(jìn)行差異化動(dòng)態(tài)按需配置,降低了資源利用效率。
狼群算法作為一種基于群智能的元啟發(fā)式優(yōu)化算法,可以抽象描述為3種智能行為(游走行為、召喚行為、圍攻行為)以及“勝者為王”的頭狼產(chǎn)生規(guī)則和“強(qiáng)者生存”的狼群更新機(jī)制(Wolves Strong Survival Update Mechanism,WSSUM),已被成功運(yùn)用于各類調(diào)度優(yōu)化問題的求解。文獻(xiàn)[6]針對(duì)裝配車間作業(yè)調(diào)度組織順序問題,采用一種灰狼優(yōu)化(Grey Wolf Optimizer,GWO)新型算法,優(yōu)點(diǎn)是以最短時(shí)間找到最優(yōu)作業(yè)序列,拓展了狼群算法的應(yīng)用,但此種方法并不能保證系統(tǒng)的穩(wěn)定性,可能導(dǎo)致無解;文獻(xiàn)[7]為解決焊接動(dòng)態(tài)調(diào)度過程中產(chǎn)生的機(jī)器負(fù)載過大和不穩(wěn)定性等問題,提出一種混合多目標(biāo)灰狼優(yōu)化器(Hybrid Multi-Objective Grey Wolf Optimizer,HMOGWO)調(diào)度模型,雖對(duì)系統(tǒng)調(diào)度加強(qiáng)了深度探索,但容易陷入局部最優(yōu);文獻(xiàn)[8]針對(duì)狼群算法存在的收斂速度慢、人工交互不理想的缺點(diǎn),提出一種改進(jìn)搜索策略的狼群算法,對(duì)圍攻行為進(jìn)行了自適應(yīng)改進(jìn),使算法具有自我調(diào)節(jié)作用,達(dá)到了理想效果。
本文在綜合考慮了火場(chǎng)的滅火過程及森林消防所要遵從一般原則后,采取一種基于Cell-DEVS模型[9]的WSSUM算法進(jìn)行森林滅火資源調(diào)度研究,并在全局搜索與局部尋優(yōu)方面進(jìn)行了優(yōu)化平衡處理,提出一種改進(jìn)局部搜索策略狼群優(yōu)化算法(Wolf Optimization Algorithm,WOA),提高了滅火效率,增強(qiáng)了調(diào)度系統(tǒng)穩(wěn)定性。
1 Cell-DEVS模型
Cell-DEVS 模型[9]是基于 DEVS 仿真系統(tǒng)[10-11]事件流程處理原理,為元胞建模提供了動(dòng)態(tài)系統(tǒng)層次化與模塊化描述機(jī)制。DEVS利用抽象數(shù)學(xué)集合形式來表達(dá)離散事件仿真框架,其特點(diǎn)主要包括:1)發(fā)生事件的時(shí)間通常是不連續(xù)的;2)事件變化域與狀態(tài)空間均具有離散性;3)事件的發(fā)生具有突發(fā)性。按照系統(tǒng)的層次分為原子模型與耦合模型:原子模型是不可再拆分的最基本模型,它定義了被建模實(shí)體的自治行為,包括系統(tǒng)狀態(tài)轉(zhuǎn)變、外部輸入事件響應(yīng)和系統(tǒng)輸出等;原子模型通過連接可以組成耦合模型,一個(gè) DEVS耦合模型應(yīng)包含外部事件輸入、輸出,組件集合,外部輸入、輸出與內(nèi)部耦合,以及對(duì)并發(fā)事件的處理方法。
DEVS原子模型表示如下:

其中:X表示輸入事件的集合;Y表示輸出事件的集合;S表示系統(tǒng)狀態(tài)集合。δint是內(nèi)部轉(zhuǎn)換函數(shù),δint:S→S';δext是外部轉(zhuǎn)換函數(shù),δext:Q × Xb→ S;Q={(s,e)|s∈ S,0 ≤ e≤ ta(s)}表示所有狀態(tài)集,Xb表示接收到的X集,e表示系統(tǒng)在狀態(tài)S停留的時(shí)間。ta:S→R+0→∞是時(shí)間推進(jìn)函數(shù),如果ta(S)=+∞,表示S為靜止?fàn)顟B(tài),無外部事件到達(dá)時(shí),系統(tǒng)將一直停留在該狀態(tài);如果ta(S)=0,表示S為瞬時(shí)狀態(tài),仿真時(shí)鐘不推進(jìn);如果ta(S)=t,表示外部事件在系統(tǒng)保持的時(shí)間為t。λ是輸出函數(shù),λ:S→Yb是輸出函數(shù)。
DEVS耦合模型表示如下:

其中:X表示耦合模型外部輸入集合;Y表示耦合模型輸出集合;D表示所有耦合模型的組件引用集合;Mi表示一個(gè)耦合DEVS模型中的原子DEVS模型或者耦合模型,i∈D;EIC表示耦合模型的外部輸入與其內(nèi)部包含模型輸入的連接;EOC表示內(nèi)部包含模型的輸出與耦合模型的輸出的連接;IC表示耦合模型內(nèi)部的連接關(guān)系;Select表示選擇函數(shù)。
在Cell-DEVS模型中,每個(gè)元胞均有事件輸入和輸出端口,能夠及時(shí)地跟相鄰的元胞進(jìn)行信息交換;同時(shí),每個(gè)元胞又作為子系統(tǒng),可以被看作為具有內(nèi)部獨(dú)立結(jié)構(gòu)和輸入輸出接口的模塊,若干個(gè)模塊通過連接組成耦合模型(如圖1)。在用Cell-DEVS模型進(jìn)行事件調(diào)度時(shí),設(shè)有一個(gè)時(shí)間控制成分,該成分從事件表中選擇活動(dòng)確定性較強(qiáng)的事件,并將仿真鐘修改到該事件發(fā)生的時(shí)間,再調(diào)用與該事件相應(yīng)的事件處理模塊,該事件處理完后返回時(shí)間控制成分,這樣,事件不斷地被選擇與處理,直到事件終止。

圖1 Cell-DEVS耦合模型Fig.1 Cell-DEVS coupling model
2 基于Cell-DEVS的WSSUM調(diào)度算法
基于WSSUM的森林滅火資源調(diào)度作業(yè)是關(guān)于分布式“任務(wù)-平臺(tái)”關(guān)系設(shè)計(jì)問題與平臺(tái)資源調(diào)度多目標(biāo)優(yōu)化問題,根據(jù)食物源“由強(qiáng)到弱”的原則進(jìn)行分配,在算法中去除目標(biāo)函數(shù)值最差的R匹人工狼(R>1且為整數(shù)),同時(shí)隨機(jī)產(chǎn)生R匹人工狼[12]。在確定資源調(diào)度分配機(jī)制過程中,根據(jù)任務(wù)的資源需求動(dòng)態(tài)分配任務(wù)優(yōu)先級(jí),并利用Cell-DEVS動(dòng)態(tài)系統(tǒng)層次化和模塊化建模方式,將離散事件與時(shí)間以元胞為統(tǒng)一體進(jìn)行分析研究,任務(wù)優(yōu)先級(jí)隨著時(shí)間發(fā)生變化,并結(jié)合元胞的局部作用規(guī)則進(jìn)行狀態(tài)分析。假設(shè)火場(chǎng)蔓延狀態(tài)為均勻燃燒,WOA全局搜索調(diào)度的過程如下:
1)初始化。初始化狼群數(shù)目ω,人工狼位置Xi,步長因子δ,更新比例因子ρ,探狼比例為參數(shù),元胞長度為a。
2)根據(jù)獵物氣味濃度Y分為m個(gè)等級(jí),選取不同位置若干峰值為最優(yōu)解并派出探狼i,除頭狼外,按照獵物分配規(guī)則,根據(jù)獵物氣味濃度所處等級(jí)層次分批派出人工狼j,直到Xj(a,b)=Xi(a,b),(a,b) 為元胞坐標(biāo)值。
3)人工狼根據(jù)式(3)向獵物奔襲,若途中頭狼感知的獵物氣味濃度逐漸加大,則對(duì)其后的人工狼進(jìn)行召喚,加大對(duì)獵物的追捕,并按照“強(qiáng)者恒強(qiáng),強(qiáng)者生存”的更新機(jī)制,對(duì)頭狼及其人工狼進(jìn)行位置及群體更新。
4)判斷頭狼是否完成對(duì)獵物的合圍。依據(jù)是頭狼所處元胞中心點(diǎn)之間的距離不大于:若達(dá)到該條件,即輸出頭狼的位置及迭代次數(shù)k;否則轉(zhuǎn)2)。
人工狼j在第k+1次迭代中,在d維變量空間中所處的位置為:

式中,gkd為第k代群體頭狼在第d維空間中的位置。式(3)由兩部分組成,前者為人工狼當(dāng)前位置,體現(xiàn)狼的圍獵基礎(chǔ);后者表示人工狼逐漸向頭狼位置聚集的趨勢(shì),體現(xiàn)頭狼對(duì)狼群的指揮。
在WOA作業(yè)中,離散事件主要包括林火蔓延速度、蔓延方向等。林火蔓延速度決定了火情威脅程度,直接決定了狼群分配的權(quán)重,由于火線元胞蔓延速度不一,決定了狼群向食物源發(fā)起攻擊的方向不唯一。在系統(tǒng)中,離散時(shí)間則采用時(shí)間步長法,每推進(jìn)一個(gè)時(shí)間步長,就遍歷一遍系統(tǒng)中的事件。為簡(jiǎn)化所研究問題的復(fù)雜性,食物源由火險(xiǎn)等級(jí)確定,火險(xiǎn)等級(jí)根據(jù)林火蔓延速度確定,分為五個(gè)等級(jí),火險(xiǎn)等級(jí)與蔓延速度關(guān)系如表1所示。
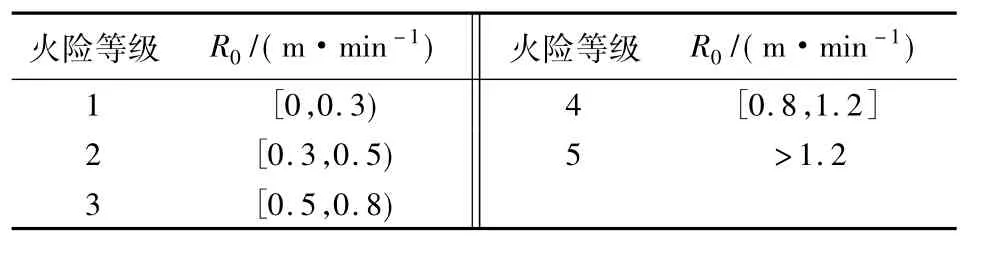
表1 火險(xiǎn)等級(jí)和蔓延速度關(guān)系Tab.1 Relationship between level of fire danger and spread rate
林火蔓延速度可根據(jù)Rothermel林火蔓延模型[13]計(jì)算得到。Rothermel林火蔓延模型是基于能量守恒定律的物理機(jī)理模型,從宏觀角度研究火焰前鋒的蔓延過程,不考慮過火火場(chǎng)的持續(xù)燃燒,類似“似穩(wěn)態(tài)”機(jī)理。由于風(fēng)在每一個(gè)方向?qū)β铀俣鹊挠绊懚疾煌@使得火災(zāi)蔓延的形狀近似于橢圓。利用Rothermel林火蔓延模型求出林火在一維方向上的傳播速度后,根據(jù)橢圓模型,將林火蔓延從一維轉(zhuǎn)換到二維空間求得各個(gè)方向的蔓延速度。假設(shè)火源點(diǎn)為橢圓的焦點(diǎn),火速最大的火前鋒的蔓延方向?yàn)闄E圓的長軸,則長短軸之比為:

式中:LB為橢圓長軸和短軸比,U為風(fēng)速。
火焰前后鋒之比(HB):

根據(jù)式(4)、(5)可以求出橢圓的短半軸長a,長半軸長b和橢圓焦點(diǎn)到中心點(diǎn)的距離c,a、b、c可以理解為著火點(diǎn)在火翼、火頭、火尾3個(gè)方向的蔓延速度(如圖2所示)。通過以上步驟,可以實(shí)現(xiàn)將一維方向的林火蔓延速度分解成8個(gè)方向的蔓延速度,從而實(shí)現(xiàn)林火蔓延在Cell模型中從一維到二維的轉(zhuǎn)換。

圖2 火勢(shì)蔓延示意圖Fig.2 Schematic diagram of fire spread
根據(jù)式(4)和(5)計(jì)算可得:

Rothermel林火蔓延模型公式經(jīng)過幾次變換,其最終形式如下:

其中:VRothermel為蔓延速度(m·min-1);φs為坡度修正系數(shù);φw為風(fēng)速修正系數(shù);IR為火焰反應(yīng)強(qiáng)度(kJ·min-1·m-2); ρb為可燃物床層密度(kg·m-3);ξ為林火的蔓延率;ε為有效熱系數(shù);Qig為預(yù)燃熱,即點(diǎn)燃單位質(zhì)量可燃物所需的熱量(kJ·kg-1)。
在用Cell-DEVS描述調(diào)度作業(yè)時(shí),須關(guān)注事件驅(qū)動(dòng)模型各模塊的狀態(tài)轉(zhuǎn)移過程,為此采用面向?qū)ο竽P头治鲈O(shè)計(jì)中的UML(Unified Modeling Language)時(shí)序圖,通過狀態(tài)轉(zhuǎn)移進(jìn)行過程描述。圖3顯示了Cell-DEVS調(diào)度作業(yè)UML時(shí)序圖。

圖3 Cell-DEVS調(diào)度作業(yè)UML圖Fig.3 UML diagram of Cell-DEVS resource scheduling
3 基于Cell-DEVS的WOA調(diào)度算法
基于CELL-DEVS的WSSUM調(diào)度算法在完成全局搜索同時(shí),保證了較好的魯棒性與全局收斂性能,有效避免了其他群體智能算法易早熟的缺陷;尤其是針對(duì)復(fù)雜函數(shù),諸如Cell-DEVS多維函數(shù)計(jì)算,尋優(yōu)效果較好。然而,Cell-DEVS基于離散時(shí)間與事件機(jī)制,每一個(gè)時(shí)間步長推進(jìn)一次,由于每個(gè)元胞完成作業(yè)效率不同,在這個(gè)時(shí)間間隙,就可能存在某些資源閑置問題,為保證資源高效與充分利用,就必須對(duì)調(diào)度資源進(jìn)行魯棒優(yōu)化配置,使得在Cell-DEVS系統(tǒng)中鄰近元胞之間資源交互更加合理。
在森林滅火資源WSSUM調(diào)度算法中,頭狼通過指揮讓更多人工狼隨著探狼向獵物運(yùn)動(dòng),同時(shí)火線各方向調(diào)度并發(fā)執(zhí)行,并沒有產(chǎn)生鄰域之間的交互規(guī)則。為增強(qiáng)探狼間局部搜索能力,從而實(shí)現(xiàn)交互,首先需要進(jìn)行鄰域搜索,采用一種類似人工蜂群[14-15]的搜索開采方式。在搜索過程中,隨著元胞狀態(tài)變化,探狼可放棄已知的食物源,向著獵物濃度較高的地方移動(dòng),并以距離最近為次要原則尋找最新食物源,并根據(jù)式(7)進(jìn)行狼群的位置更新:

式中: φi,d為[0,1]內(nèi)的隨機(jī)數(shù),ηi,d為[- 1,1]內(nèi)的隨機(jī)數(shù),k≠i≠d。前半段增強(qiáng)了狼群的局部尋優(yōu)能力,后半段增強(qiáng)了狼群的全局搜索能力,保持了狼群之間信息的密切交流,從而實(shí)現(xiàn)人工狼之間交互。
當(dāng)狼群在奔襲途中選擇鄰域食物源的時(shí)候,若鄰域元胞獵物濃度相同、距離相等時(shí),就以隨機(jī)的形式選擇食物源使系統(tǒng)進(jìn)行下去,其概率計(jì)算如式(8);其后,再根據(jù)式(7)進(jìn)行狼群位置的更新。

其中,n是食物源個(gè)數(shù),只有2個(gè)鄰域可選擇,故n=2,fiti是第i個(gè)食物源的適應(yīng)度;fiti按照式(9)計(jì)算:

式中vi是火勢(shì)蔓延速度。
本文提出的WOA融合于森林滅火資源調(diào)度Cell-DEVS耦合模型中,通過對(duì)調(diào)度系統(tǒng)原子模型進(jìn)行改進(jìn),引入調(diào)節(jié)機(jī)制,實(shí)現(xiàn)了鄰域交互搜索優(yōu)化。森林滅火資源調(diào)度耦合模型由3個(gè)子模型耦合而成,除了考慮調(diào)度指揮模型外,還要考慮Rothermel林火蔓延模型與調(diào)度評(píng)估模型,調(diào)度指揮模型主要針對(duì)參與滅火的人力資源進(jìn)行調(diào)度分析,包括3個(gè)Cell-DEVS原子模型:分析系統(tǒng)、調(diào)度系統(tǒng)與通信系統(tǒng),其主要職能包括制定人力部署方案、滅火進(jìn)攻方案、各級(jí)力量任務(wù)分配等;Rothermel林火蔓延模型為調(diào)度指揮模型提供初步火情預(yù)想,包括林火蔓延方向、蔓延速度與火勢(shì)等級(jí)評(píng)估等;調(diào)度評(píng)估模型主要為滅火調(diào)度提供力量調(diào)集預(yù)估及事后的滅火效果評(píng)估。
綜上,森林滅火資源調(diào)度Cell-DEVS耦合模型可以表示為:

其中,X={(p,v)|p∈InPorts,v∈Xin},InPorts={“in”},Xin={“火情警報(bào)”,“人力調(diào)集”},Y={(p,v)|p ∈OutPorts,v∈Yout},OutPorts={“out”},Yout={“人力部署”,“任務(wù)分配”,“滅火進(jìn)攻”};D={“調(diào)度指揮”,“Rothermel林 火 蔓 延”, “調(diào) 度 評(píng) 估 ”},M調(diào)度指揮= 調(diào) 度 指 揮;MRothermel林火蔓延=Rothermel林火蔓延;M調(diào)度評(píng)估= 調(diào)度評(píng)估;EIC={(“接收 /分析火情信息”,“in”),(“DEVS-Agent”,“in”)};EOC={(“DEVS-Agent”,“out”),(“接收 /分析火情信息”,“out”)};IC={(“調(diào)度指揮”,“in”),(“Rothermel林火蔓延”,“out”),(“Rothermel林火蔓延”,“in”),(“調(diào)度指揮”,“out”),(" 調(diào)度指揮",“in”),(“調(diào)度評(píng)估”,“out”),(“調(diào)度評(píng)估”,“in”),(“調(diào)度指揮”,“out”)}。
調(diào)度指揮模型中調(diào)度系統(tǒng)Cell-DEVS狀態(tài)轉(zhuǎn)移圖表示如圖4。

圖4 調(diào)度指揮模型中調(diào)度系統(tǒng)原子模型狀態(tài)轉(zhuǎn)移圖Fig.4 State transfer diagram of scheduling command model scheduling system atom model
調(diào)度系統(tǒng)原子模型表示如下:

其中:X={report,analyze,organize,fighting};Y={orders,feedback};S = {S_actuality,S_command,S_est-power,S_all-task,S_action};ta(S_actuality)=+ ∞,ta(S_command)=t,ta(S_est-power)=0,ta(S_all-task)=0,ta(S_action)=t;int:S_actuality → S_command,S_command → S_est-power,S_est-power→S_all-task,S_command → S_all-task;ext:S_all-task×fighting → S_action,S_action × feedback →S_command,λ:S_command→ orders;S_action→ feedback。
4 仿真實(shí)驗(yàn)
以湖南省水口山林場(chǎng)某區(qū)域?yàn)檠芯繉?duì)象,應(yīng)用GIS(Geographic Information System)[16]處理軟件 ArcGIS 10.0,針對(duì)該區(qū)域等高線地形圖進(jìn)行數(shù)據(jù)分析處理。該林場(chǎng)系武功山系的一條支脈,低山地貌,最高海拔867 m,最低海拔205 m,坡度在30°~40°,最大坡地達(dá)45°,中亞熱帶季風(fēng)濕潤氣候,年平均氣溫17.8℃,年平均降水量1 500 mm,林地面積為3.6597萬畝(1 畝≈666.667 m2),非林業(yè)用地 0.012 9 萬畝,森林覆蓋率98.6%。在選擇的研究區(qū)域中,主要分布以下植被類型:杉木林、銀杏、樟樹、三尖杉、金錢松、枯枝落葉、茅草雜草、莎草矮樺、牧場(chǎng)草原等林地。
圖5與圖6分別展示了研究區(qū)等高線圖(原始數(shù)據(jù))和用arcgis制作的200×200元胞地形圖,利用等高線原始數(shù)據(jù),可以轉(zhuǎn)換生成坡度數(shù)據(jù)。由于Rothermel林火蔓延模型參數(shù)復(fù)雜,其中部分參數(shù)必須經(jīng)過長期的實(shí)驗(yàn)才能取得,所以本研究對(duì)某些參數(shù)賦經(jīng)驗(yàn)值,總體考慮情況如下:天氣濕潤,植物含水率較高,試驗(yàn)林地連續(xù)一周無雨;地面風(fēng)干程度為50%;其次,Rothermel林火蔓延模型中的其他因子 IR,ξ,ρb,ε,Qig,φw,φs等均可以通過實(shí)驗(yàn)與計(jì)算大致確定,這些參數(shù)的精確程度常可以在模型的檢驗(yàn)和評(píng)價(jià)中,加以適當(dāng)?shù)恼{(diào)整和變更,此處不再贅述,具體參與計(jì)算的參數(shù)類型與取值如表2所示。
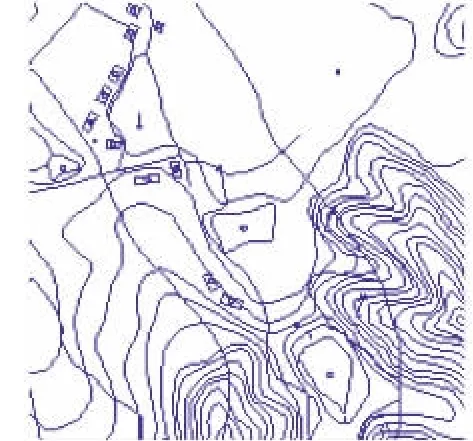
圖5 研究區(qū)域等高線圖Fig.5 Contour map of study region

圖6 研究區(qū)域地形圖 Fig.6 Topographic map of study region

表2 Rothermel林火蔓延模型輸入?yún)?shù)Tab.2 Rothermel model input parameter
利用計(jì)算機(jī)對(duì)森林滅火資源調(diào)度進(jìn)行仿真模擬是實(shí)驗(yàn)中最關(guān)鍵的一步,其主要過程為:第一、從背景數(shù)據(jù)庫中輸入可燃物載量、含水率、可燃物類型等靜態(tài)數(shù)據(jù)及風(fēng)速等動(dòng)態(tài)數(shù)據(jù);第二、根據(jù)輸入的靜態(tài)數(shù)據(jù)與動(dòng)態(tài)數(shù)據(jù),利用Rothermel林火蔓延模型計(jì)算出林火的蔓延速度;第三、根據(jù)林火的蔓延速度,分別對(duì)WOA及平行攻擊兩種調(diào)度算法進(jìn)行仿真計(jì)算;第四、將計(jì)算結(jié)果與仿真效果圖在仿真平臺(tái)上輸出。
在森林滅火資源調(diào)度仿真實(shí)驗(yàn)中,須充分考慮計(jì)算機(jī)數(shù)據(jù)處理的速度,因此將該研究區(qū)的數(shù)據(jù)信息“儲(chǔ)存”在200×200個(gè)元胞中,每個(gè)元胞代表實(shí)際大小為10 m×10 m,仿真界面大小為600像素×600像素。仿真實(shí)驗(yàn)具體假設(shè)如下:單兵滅火效率為常量λ;派出消防人數(shù)為常量ε;失火時(shí)刻為t0;開始滅火時(shí)刻為t1;火被撲滅時(shí)刻為t2;在時(shí)刻t森林燒毀面積為B(t0),且B(0)=0;開始滅火后火勢(shì)蔓延速度為R-λε(R→0),當(dāng)R=0時(shí),火開始被逐漸撲滅。由于消防人數(shù)為常量,在進(jìn)行火場(chǎng)滅火過程中,火場(chǎng)鄰域元胞人員不斷實(shí)現(xiàn)交互。
為測(cè)試本文提出的森林滅火資源調(diào)度策略的性能,采用兩種實(shí)驗(yàn)方案,方案一為WOA;方案二為平行攻擊調(diào)度算法。圖7是兩個(gè)實(shí)驗(yàn)方案的效果。

圖7 兩個(gè)方案滅火分時(shí)效果Fig.7 Fire-fighting effects of different moments for two schemes
為定量描述與比較兩個(gè)實(shí)驗(yàn)方案的效率,分別計(jì)算得到兩個(gè)實(shí)驗(yàn)方案的實(shí)時(shí)火線周長與滅火面積,為方便統(tǒng)計(jì)分析,每20 min記錄一次,直到作業(yè)完成。

表3 實(shí)時(shí)滅火面積與火線周長數(shù)據(jù)Tab.3 Real-time fire-fighting area and firewire perimeter data
對(duì)表1數(shù)據(jù)進(jìn)行分析對(duì)比:該實(shí)驗(yàn)仿真以20 min為一個(gè)時(shí)間步長,對(duì)森林滅火資源的調(diào)度進(jìn)行了定量分析。從圖8與圖9的曲線斜率上看,無論是從實(shí)時(shí)火線周長還是實(shí)時(shí)滅火面積的角度進(jìn)行分析,從時(shí)間t1到時(shí)間t2,方案一比方案二滅火時(shí)間更短,縮短了10.1%。其次,從曲線收斂程度可以看出,本文提出的改進(jìn)算法WOA較WSSUM算法收斂速度更快,在整個(gè)過程中的中間時(shí)段,收斂速度達(dá)到最快。

圖9 兩個(gè)方案火線實(shí)時(shí)周長對(duì)比Fig.9 Comparison of real-time firewire perimeter for two schemes

圖10 兩個(gè)方案滅火實(shí)時(shí)面積對(duì)比Fig.10 Comparison of real-time fire-fighting area for two schemes
5 結(jié)語
本文建立了一個(gè)基于Cell-DEVS的森林滅火資源調(diào)度模型,并充分利用Cell-DEVS良好的分層遞階特性和離散事件驅(qū)動(dòng)的動(dòng)態(tài)仿真功能,針對(duì)各個(gè)階段的林火蔓延態(tài)勢(shì),實(shí)現(xiàn)了森林滅火資源的動(dòng)態(tài)優(yōu)化調(diào)度。實(shí)驗(yàn)證明了Cell-DEVS模型實(shí)現(xiàn)了從事件驅(qū)動(dòng)層到行為表示層的模型重用;其次,將改進(jìn)后的WOA應(yīng)用于該模型中,滅火性能得到顯著提升,從實(shí)驗(yàn)數(shù)據(jù)曲線圖看出,由于整體滅火效率的提高,滅火時(shí)間得到了有效縮短,得到了理想效果。另外,本文提出Cell-DEVS森林滅火資源調(diào)度模型采用了規(guī)則元胞形式,在實(shí)驗(yàn)、計(jì)算、評(píng)估應(yīng)用中簡(jiǎn)潔高效,但在某些林場(chǎng)中,無線傳感器部署位置可能并不規(guī)則,導(dǎo)致數(shù)據(jù)采集,林火模擬等不能完全采用格則元胞形式,因此,可以引入泰森多邊形(Voronoi Polygon)模型[17]或多元復(fù)合元胞模型[18],進(jìn)行數(shù)據(jù)插值處理與實(shí)驗(yàn)?zāi)M。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
江蘇安全生產(chǎn)(2023年1期)2023-02-08 05:58:38
吉林廣播電視大學(xué)學(xué)報(bào)(2021年4期)2022-01-14 02:35:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:26
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小天使·一年級(jí)語數(shù)英綜合(2018年11期)2018-11-23 09:47:26
資源再生(2017年3期)2017-06-01 12:20:59
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03