含多類型分布式電源的源網荷協調優化控制策略分析
2018-07-31 11:10:28歐陽曾愷
電力工程技術 2018年4期
高 輝, 徐 晴, 歐陽曾愷,宋 樂
( 1. 南京郵電大學自動化學院、人工智能學院,江蘇 南京 210023;2. 國網江蘇省電力有限公司電力科學研究院,江蘇 南京 211103)
0 引言
近年,我國能源生產量和消費量均已居世界前列,但在能源供給和利用方式上存在系列問題,如能源結構不合理、能源利用效率不高、可再生能源開發利用比例低、能源安全利用水平有待進一步提高等。能源已經成為制約國民經濟可持續發展的主要瓶頸,能源利用方式需從傳統粗放型向精細化、集約化、可持續轉變,加快能源生產和利用方式變革,強化節能優先戰略,全面提高能源開發轉化和利用效率,合理控制能源消費總量,構建安全、穩定、經濟、清潔的現代能源產業體系[1]。
在面臨能源短缺困難及節能減排的壓力下,建設清潔、可靠、互動、高效的智能電網成為推動時代經濟轉型、發展低碳經濟的重要手段。含分布式電源的智能配電網建設尤為關鍵,其并網標準、能效互動機制和協調控制等研究工作及工程建設得到了國內外的廣泛關注。文獻[2—3]梳理了國內外分布式電源和微電網并網標準現狀,并指明國內外相關標準主要差異;文獻[4—5]對新能源并網電能質量問題進行分析并指出解決電能質量問題的潛在優勢;文獻[6]研究了多時間尺度下基于主動配電網的分布式電源協調控制策略,提出了基于最優潮流的主動配電網全局優化算法和基于功率控制誤差的主動配電網區域自治控制算法,保證了其用于主動配電網實時調度的有效性;文獻[7]通過研究中國分布式電源發展對各相關主體的影響,提出了針對我國分布式電源產業的包含接網費用、輔助服務費用、設備補貼、發電量補貼等多維度的綜合補償體系,保障了分布式電源業主、電網公司、發電企業等相關主體的合理利益,并提出促進分布式電源產業健康有序、快速、可持續發展的政策建議;文獻[8]基于配電網源網荷不對稱現象,建立了配電網常規元件及分布式電源的穩/暫態模型,開發了智能配電網運行仿真平臺,并驗證了所提方法及研制系統的合理性、有效性;文獻[9]針對分布式電源輸出功率的隨機性問題,提出基于點估計法的含分布式電源的配電網可靠性評估模型,可有效實現分布式電源輸出功率和配電網負荷水平不確定性的模擬;文獻[10]從分布式電源高密度接入、交直流混聯等特點分析入手,介紹了未來配電網故障分析亟待探索的關鍵問題;另外,文獻[11—14]從合作博弈論以及潮流特征方面研究了分布式電源對配電網運行的影響及對應策略。
國外研究主要集中在分布式電源并網協調控制方面,文獻[13]研究了不同微點電網場景下分布式電源接入的分布式控制策略,可提高電網電壓和頻率調節性能;文獻[14]提出一種基于電壓控制器和快速電流控制器組合的分散控制策略,能夠實現電網快速跟蹤、穩健性和快速瞬態恢復功能。上述研究成果對推動分布式電源接入配電網具有很好的理論及工程意義,但是對于規模化分布式電源分層分區接入配電網相關研究較少。
針對規模化高密度分布式電源分層分區接入配電網發展趨勢,為了提高源網多元利用效率,文中介紹了含分布式電源的多級能源互動場景,并制定了符合多級互動場景的多時空尺度互動機制,空間尺度從下到上包括臺區、饋線、配網及主網等層次,時間尺度以天為優化單位包括準實時、超短期及短期等尺度,以多時空尺度為基準建立了含大型風電廠、燃氣輪機和集中式大容量儲能等分布式電源的源網多元互動協調優化控制模型,所研究策略為規模化高密度分布式電源接入電網提供優化控制依據。
1 多級能源互動場景及互動機制
1.1 互動控制場景
含分布式電源的源網多級能源互動控制場景如圖1所示,將區電網分為臺區級、饋線級、配網級及主網級。
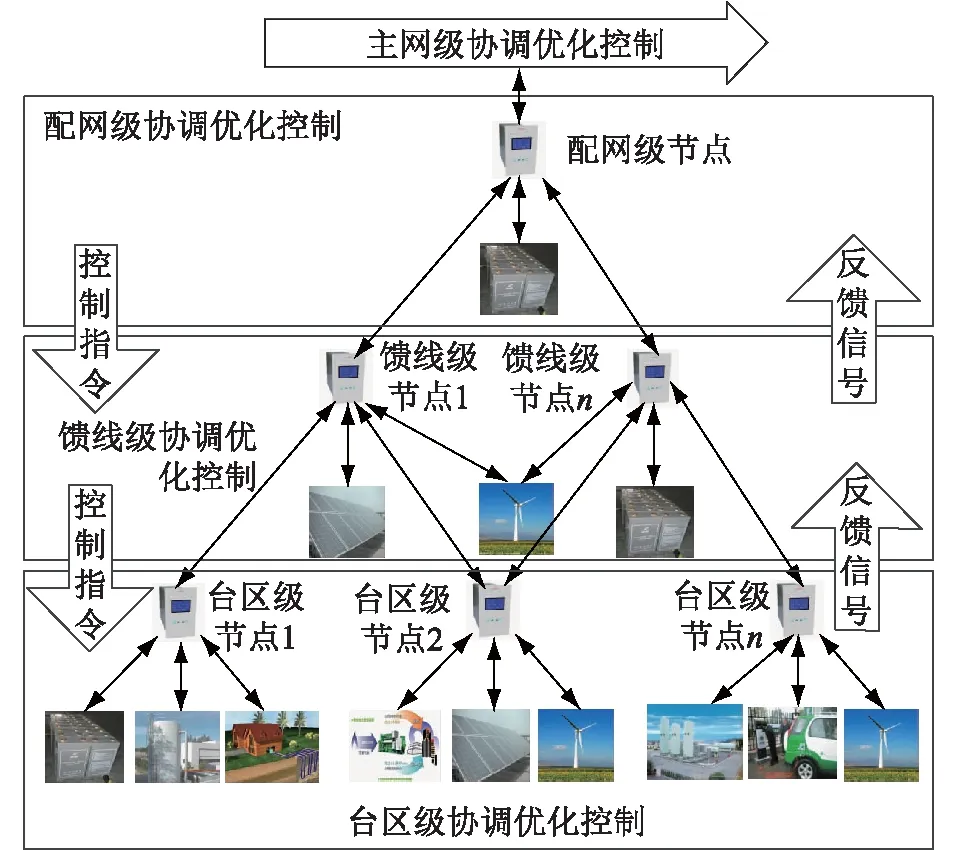
圖1 多級能源互動控制場景Fig.1 Multi-level energy interaction control scenario
臺區級協調對象包括微網系統、分布式儲能系統和自動需求響應系統提供的關口數據等;饋線級協調對象包括臺區級的綜合負荷和可調度容量信息以及中壓側的分布式電源、分布式儲能數據;配網級協調控制對象包括饋線級的綜合負荷和可調度容量信息以及高壓側的分布式電源、分布式儲能數據;主網級包含所有配網能量流、信息流、業務流。四級之間的協調控制策略為:上級向下級下發控制指令和目標曲線,下級向上級提交可調度容量、負荷信息以及反饋信號。
1.2 互動機制分析
從空間及時間尺度上進行互動機制分析,其中空間分層互動協調控制如圖2所示。
容量分析,自下而上進行容量上報:(1) 臺區級,小型分布式電源優先考慮區間內負荷供電,即就地消納,在滿足臺區內就地平衡基礎上響應目標曲線,多余容量逐級上傳;(2) 饋線和配網級,高密度分布式電源優先考慮配網內負荷轉供并就地消納,在滿足配網內就地平衡基礎上響應目標曲線,多余容量上傳至主網,統一分配;(3) 主網級,考慮規模化分布式電源的協調優化控制,滿足主網區域間互供及整體消納目標。
能量調度,自上而下計劃下發:(1) 主網級,調配中心通過主網調度容量分析,制定多級需求響應目標并逐級下發最優功率目標曲線;(2) 饋線和配網級,通過分析配網及其饋線內可調容量,并參考主網最優功率目標曲線,制定配網及饋線層優化目標并修正最優功率曲線;(3) 臺區級,通過臺區內可調容量分析,并參考配網及饋線層面最優功率目標曲線,制定臺區優化目標并修正最優功率曲線。最終,實現區域主網可調度容量優化分配。
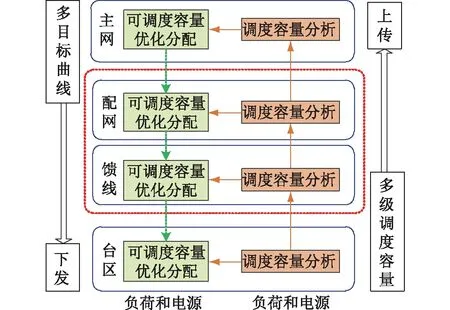
圖2 多空間尺度上互動分析架構Fig.2 Multi-spatial scale interactive analysis architecture
在時間尺度上,建立準實時、超短期和短期三種時間尺度的協調優化控制機制,實現配電網整體高效運行,如圖3所示。

圖3 多時間尺度上互動分析架構Fig.3 Multi-time scale interactive analysis architecture
(1) 短期(1 d)。短期協調優化控制時間周期為1 d,首先根據歷史負荷預測主網當天功率曲線,作為主網規模化分布式電源參與短期(1 d)互動的一個優化目標,該優化目標作為超短期優化控制的參考約束曲線,并在超短期優化過程中作為一個優化目標進行修正。
(2) 超短期(4 h)。超短期協調優化控制時間周期為4 h,參考主網功率曲線,修正該曲線,并根據小型分布式電源和高密度分布式電源不同特點,提出滿足超短期要求的其他相關優化目標和約束條件,保證高密度和小型分布式電源規模化參與互動情況下主網功率曲線最優。
(3) 準實時(15 min)。準實時協調優化控制時間周期為15 min,參考每個超短期內優化功率曲線,并修正該曲線,并根據小型分布式電源和高密度分布式電源不同特點,提出滿足準實時要求的其他相關優化目標和約束條件,目的同樣是保證高密度和小型分布式電源規模化參與互動情況下主網功率曲線最優。
2 含分布式電源的多元互動協調優化控制模型
2.1 目標函數
(1) 有功功率波動最小。
(1)
式中:PGn為接入的集中式大容量分布式電源的發電輸出有功功率;PDm為接入規模化可再生能源的發電輸出有功功率;Ploss是系統總網損。
(2) 系統網損最小。
(2)
式中:K是節點數;Gij是連接母線i和j的線路的電導;Ui和Uj是母線i和母線j的電壓;θij是母線i和母線j電壓的相角差。
(3) 經濟效益最大。
maxJ=Jr+Jf-Joc-Jof-Jp
(3)
式中:Jr為燃氣輪機售電收入;Jf為風電場售電收入;Joc為燃氣輪機運行費用;Jof為風電場運行費用;Jp為聯絡線交換功率偏差懲罰費用,計算如下[6,8]:
(4)
(5)
(6)
(7)
(8)
式中:ΔT為時間間隔,分為準實時、超短期和短期3類;t為控制時域內的時間序列;T為1 d,即24 h;λr為燃氣輪機售電價格;λf為風電廠售電價格;λA和λB分別為燃氣輪機固定運行費用和單位發電燃料費用;λC和λD分別為風機固定運行費用和單位發電成本;λp是出力偏差懲罰電價;Pg為燃氣輪機機組出力;Pf為風電廠出力;Pl為下發負荷原始風功率;Pd為電動汽車充電功率。
2.2 約束條件分析
(1) 節點潮流約束[12]。
(9)
式中:QGn為接入的集中式大容量分布式電源的發電輸出無功功率;QDm為接入規模化可再生能源的發電輸出無功功率,零值則表示該支路未接入分布式電源。
(2) 燃機輪機出力約束。
Pg_min≤Pg(t)≤Pg_max
(10)
式中:Pg_min,Pg_max分別為燃氣輪機機組出力下限和上限。
(3) 風電廠出力約束。
Pf_min≤Pf(t)≤Pf_max
(11)
式中:Pf_min,Pf_max分別為風機出力下限和上限。
(4) 燃機出力爬坡率約束。
Rg_min≤Pg(t+1)-Pg(t)≤Rg_max
(12)
式中:Rg_min,Rg_max分別為燃機機組出力爬坡率下限和上限。
(5) 風機出力爬坡率約束。
Rf_min≤Pf(t+1)-Pf(t)≤Rf_max
(13)
式中:Rf_min,Rf_max分別為風機出力爬坡率下限和上限。
(6) 負荷功率約束。
Pload_down≤Pl(t)+Pd(t)≤Pload_up
(14)
式中:Pload_down,Pload_up分別為可調負荷功率下限,可調負荷功率上限。
2.3 協調優化流程
互動協調優化過程如圖2、3所示,從空間尺度和時間尺度上針對輸電層開展協調優化控制。空間尺度上,以全網有功功率輸出平衡為目標曲線,通過多空間尺度下發至配網、饋線和臺區,在滿足就地新能源消納基礎上,實現臺區、饋線和配網多級多余能量的上送;時間尺度上,以日預測功率曲線為優化目標,通過4 h(超短期)和15 min(準實時)的優化控制,實現1 d(短期)協調優化目標。
3 算例分析
3.1 應用場景設計
應用場景如圖4所示。其中,DS為大型儲能設備;WT為大型風電場;MT為大型燃氣輪機,均接入配電網節點;DE為大型電動汽車充換電站,波峰階段作為儲能設備向電網饋電,波谷階段從電網充電,接入饋線級節點。可中斷負荷及單個電動汽車充電屬于臺區級控制。
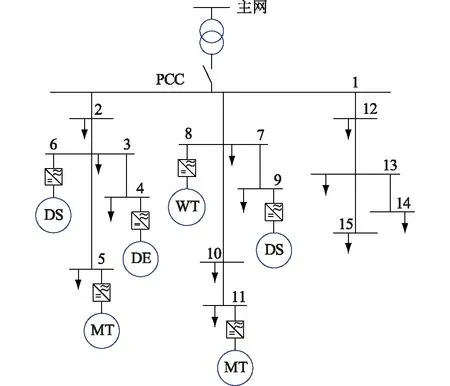
圖4 分布式電源接入主網簡圖Fig.4 The distributed power supply is connected to the main network schematic
(1) 負荷需求。總負荷最大值98 MW,其中10 kV及以下負荷最大值為84 MW,高壓負荷為14 MW。
(2) 峰谷時段劃分。峰時段(6:00—22:00)為:0.617元/(kW·h),谷時段(22:00—次日6:00)為:0.307元/(kW·h)。
(3) 輸電網層面各電源發電上網電價。風電:0.56元/(kW·h),燃機:0.35元/(kW·h)。
(4) 微電網層面的各單元成本。(1) 6×100 kW燃料電池。采用6塊燃料電池,燃料蓄電池儲能系統技術參數如下:容量為1500 kW·h,充放電功率為100 kW,放電成本為0.5元/(kW·h)。(2) 500×3.3 kW電動汽車。假定該微網內有500輛電動汽車,采用鋰電池放電成本為0.915元/(kW·h),EV電池容量為30 kW·h,充放電功率為3.3 kW。谷時段,電動汽車充電。(3) 可中斷負荷補償成本,為0.6元/(kW·h)。
仿真中優化協調控制周期根據多時空機制劃分為短期(1 d)、超短期(4 h)和準實時(15 min)3個方式,即1 d分為96個時段,每段時長為15 min,與準實時時間尺度吻合,采用MATLAB軟件編程實現。含高密度大功率分布式電源的配電網日功率預測曲線如圖5所示。

圖5 接入分布式電源的輸電網日功率預測Fig.5 Power transmission grid daily power forecast for distributed power supply
該日基礎負荷曲線中包含一個用電低谷和兩個用電高峰,可知該曲線服從三段式正態分布,經過擬合運算得出其概率密度函數為:
(15)
式中各變量具體取值如下:
(16)
該日功率預測曲線概率密度函數可為后續分布式電源參與電網互動的協調優化控制策略的執行提供參考。各分布式電源的相關參數見表1。
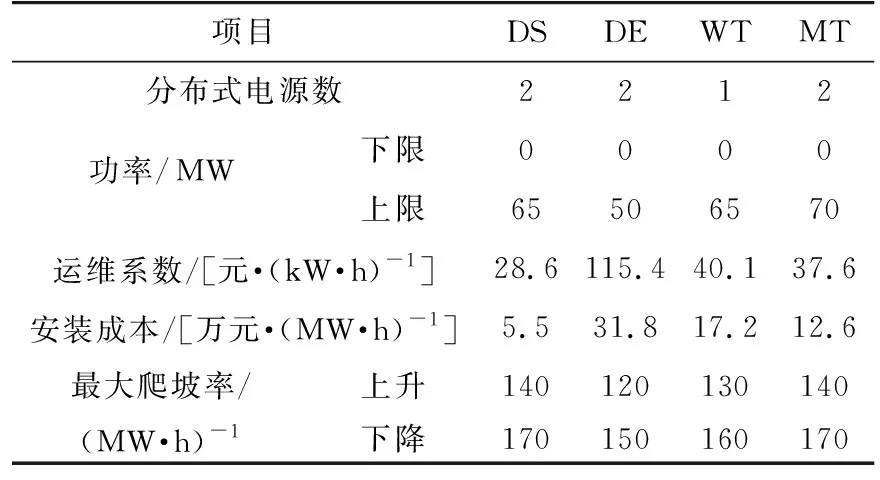
表1 分布式電源的相關參數Tab.1 Related parameters of distributed power supply
3.2 仿真結果分析
輸電層分布式電源參與互動的協調優化功率曲線對比如圖6所示。
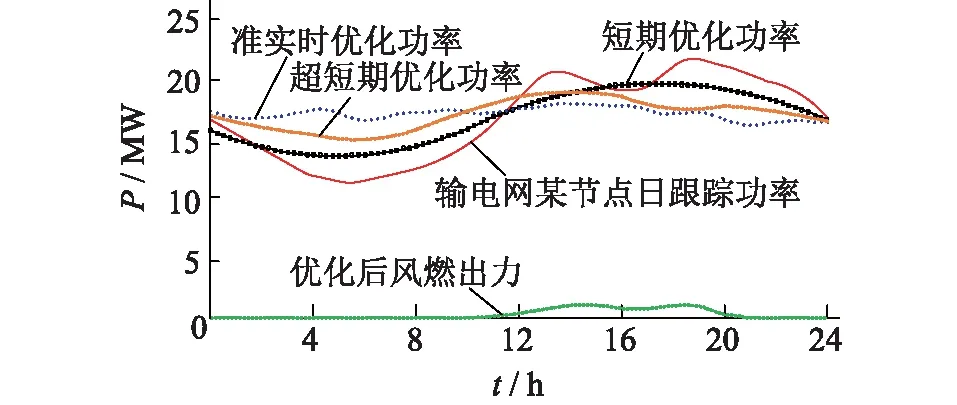
圖6 DG參與互動協調優化功率曲線對比Fig.6 DG participates in the interaction and coordination optimization power curve comparison
由圖可知,若僅執行短期(1 d)優化,相對于日預測功率曲線優化后的波峰功率有所減小、波谷功率有所增大,顯示了削峰填谷效果;但是超短期和準實時協調優化削峰填谷效果更為顯著,協調控制周期越短,削峰填谷效果越明顯。且協調優化后,大型風燃出力相對于圖5顯著下降,減少污染排放。
分布式電源參與電網互動后,系統網損與未接入分布式電源時的系統網損對比如圖7所示。

圖7 DG參與互動前后系統網損對比Fig.7 DG participated in the system network loss comparison before and after the interaction
由圖7可知,分布式電源接入主網后的每個節點網損比分布式電源未接入前的每個節點網損小,說明規模化分布式電源接入后網損降低。
通過公式(3)計算優化后的最大經濟效益為49.96萬元,相比優化前12.34萬元(崇明供電公司提供的分布式電源參與供電的經濟效益),增加了37.62萬元收益。
4 結語
文中主要研究了含分布式電源接入的電網源網多元智能協調優化控制策略,建立了以多時空尺度為基準的源網多元互動協調優化控制模型,以上海崇明島為例分析了不同分布式電源接入后整個輸電網層面優化功率曲線、風燃出力曲線以及最大經濟效益等目標,驗證了所提優化控制策略的有效性,可為規模化高密度分布式電源接入電網提供優化控制依據。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
電子制作(2016年23期)2016-05-17 03:54:05
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
電測與儀表(2015年13期)2015-04-09 11:57:38