STM32控制的智能輔助植物培育機器人*
2018-08-08 07:31:38,,,
單片機與嵌入式系統應用 2018年8期
,,,
(吉林大學 珠海學院,珠海 519041)
引 言
隨著人們對于觀賞性植物的需求日益增長,園林植物培育逐漸呈現蓬勃發展的姿態,并逐步向著專業化、自動化、智能化的方向發展[1]。傳統的培育方式依賴于人工作業,極易由于培育人員的經驗不足或人為疏忽造成植物培育不當,且由于人工費用的限制難以擴大生產[1-2]。目前,機器人行業飛速發展,將機器人技術應用至園林培育領域,可以避免上述弊端,達到園林培育的高標準化并提高產量,以促進現代園林培育行業的進一步發展。本文設計了一種基于STM32的智能輔助植物培育履帶式移動機器人,以常見的花卉植物培育研究為例,自動檢測植物培育關鍵參數并實時顯示,自動噴灑澆灌用水和營養液進行科學培育。該機器人系統實現了智能輔助植物培育功能,為機器人技術應用于園林培育行業提供了可行性技術方案。
1 系統組成及結構設計
1.1 系統組成
本系統由STM32控制器、多軸機械臂、履帶式移動底盤、多傳感器組及無線傳輸模塊等部分組成。系統總體結構如圖1所示。
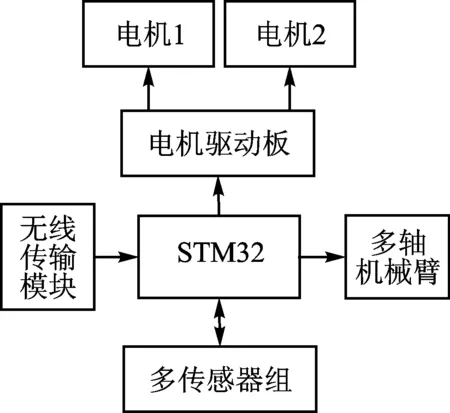
圖1 系統總體結構
本系統選擇以Cortex-M3為內核的STM32F1控制器作為主控制芯片,其具有外設資源多、浮點運算快、運算速度快、超快數據傳送、多定時器和通信接口等優點[3-4]。控制器根據既定模式及無線傳輸模塊所發出的指令,輸出PWM波以控制電機,實現移動底盤在任意方向上的自由移動。多傳感器組精確測量出目標植物的各項植物培育關鍵參數并顯示,再將檢測數據傳送至STM32控制器,控制器根據數據發送指令驅動機械臂作業,進行噴灑澆灌用水和營養液。
1.2 多軸機械臂設計
機械臂是系統的主要執行機構,通過對其舵機的控制實現機械臂的姿態及運動控制。本系統采用數字舵機MG995,相比傳統的模擬舵機,數字舵機內嵌MCU微控制器,反應速度更快、無反應區范圍小、定位精度高、抗干擾能力強[5]。機械臂末端載有土壤電導率傳感器和土壤濕度傳感器,通過驅動機械臂插入至土壤,以達到測量植物土壤相關數據的功能。此外,在機械臂上固定軟水管,用于噴灑澆灌用水和營養液。機器人進行培育作業時,首先移動機械臂至目標植物,檢測土壤數據,以土壤濕度為例,當檢測到植物土壤濕度低于設計最低閾值時,控制器控制繼電器和水泵,噴出澆灌用水提高土壤濕度。
1.3 多傳感器模塊設計
為輔助植物的科學生長,并隨時獲取植物的生長狀態,系統設計載有多傳感器組,包括土壤電導率傳感器、土壤濕度傳感器、光照傳感器、CO2傳感器、光電傳感器、空氣溫濕度傳感器、超聲波傳感器和紅外傳感器等。
以土壤電導率指標為例分析,其目的是獲取植物的含鹽量參數,是植物培育中的一項非常重要指標。土壤浸出液中各種鹽類一般以離子的形式存在,總鹽量也可以表示為土壤浸出液中各種陽離子的量和各種陰離子的量之和,故可以通過測量土壤的電導率反映出植物混合鹽的含量。在實際檢測中,電導率與鹽分大致呈線性關系,以溫度25 ℃為基準,其比例關系為:
Ec=K·Sa(1)
其中,Ec為電導率(μs/cm),Sa為鹽度(mg/l),K為比例系數(s·m2/kg),取值范圍為0.055~0.075。
在其它溫度下,則需加以校正,即溫度每變化1 ℃,其含鹽量大約變化1.5~2%。在溫度高于25 ℃時用負值,溫度低于25 ℃時用正值,求鹽度公式如下:
(2)
其中ξ為校正系數,ξ=k(25-T),k=1.5~2%。
據此可根據電導率估算鹽分。利用土壤電導率傳感器測量土壤電導率、溫度的換算關系如表1所列(電壓輸出范圍為0~2 V)。
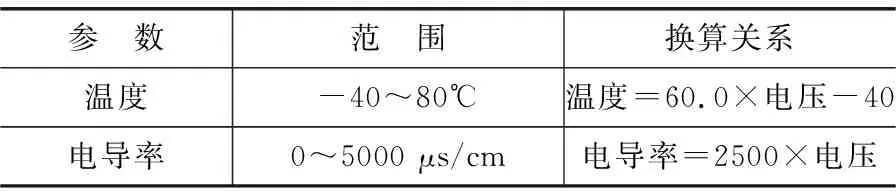
表1 土壤電導率、溫度的換算關系表
1.4 無線通信設計
本系統的無線通信鏈路如圖2所示,用于移動機器人手動模式作業下的遙控操作。采用PS2無線操作方式,其具有傳輸速度快、操作簡單的優點。通過操控PS2的控制鍵,發射指令到信號接收模塊,該接收模塊再與控制器相通信,以實現機器人的移動、澆灌和檢測等功能。

圖2 無線通信鏈路
1.5 噴灌及監測設計
噴灌裝置位于機器人底板上,在機械臂上固定軟水管,用于噴灑澆灌用水和營養液。通過控制舵機、繼電器和水泵實現噴灑功能。系統側位搭載了光電傳感器,在機器人移動過程中,可以檢測到花盆位置并自動停住進行作業。此外,機器人上載有攝像頭和WiFi模塊,可以通過Android手機端APP實時觀測植物[6]。
2 作業方式及運動控制設計
2.1 作業方式設計
本系統實現自動和手動兩種作業方式,系統工作流程如圖3所示。在自動模式下,機器人按照預定的工作循跡自動行駛,根據光電傳感器檢測的植物位置信息自動前進或停止,在工作點位置進行植物生長信息的自動檢測,并根據測量結果驅動電機和機械臂上的舵機,完成作業任務。當機器人在起始點位置時候,啟動自動模式,向著工作點1位置行駛。到達工作點1位置時,通過傳感器感應到花盆的位置,機器人自動停下,插入傳感器檢測并判斷是否需要噴灑水和營養液,完成任務后往工作點2位置行駛,進入下一個任務目標繼續工作,依次循環。在手動模式下,工作人員可以通過無線傳輸,將控制信號發送至機器人驅動電機和舵機,完成移動機器人的運動狀態、檢測顯示及噴灌培育等作業操作。

圖3 工作流程示意圖
2.2 運動控制設計
本系統采用履帶式移動底盤方式實現機器人的移動,通過STM32輸出PWM波控制電機和舵機[7-8],調節左右兩個電機的正反轉帶動履帶的轉動,以帶動底盤移動。在機械臂控制方面,通過對舵機的控制實現機械臂的姿態及運動控制。通常控制器直接輸出的電流較小,無法直接驅動電機和舵機,故采用電機驅動模塊L298N以放大電流,加強單片機驅動負載的能力,其優點在于有過電流保護功能,當出現電機卡死時,可以保護電路和電機。
3 數據采樣及通信設計
3.1 采樣算法設計
為提高數據獲取的準確性,本系統采用兩種數字濾波算法:溫濕度數據采用限幅濾波法(程序判斷濾波法)、土壤電導率A/D轉換采用中位值濾波法[9]。其中,溫濕度數據采用限幅濾波法的基本思路是:確定兩次采樣允許的最大偏差值(設error_AD),每次檢測到新值時進行判斷,如果本次值與上次值之差 value_new-value≤error_AD,則本次值有效,如果本次值與上次值之差value_new-value > error_AD,則本次值無效,放棄本次值,取上次值代替本次值。該算法的優點是能有效克服因偶然因素引起的脈沖干擾。
土壤電導率檢測的中位值濾波法的基本思路是:連續采樣N_AD次(N_AD取奇數),將N_AD次采樣值按大小排列,取中間值為本次有效值。該算法的優點是能有效克服因偶然因素引起的波動干擾,對溫度、液位等變化緩慢的被測參數有良好的濾波效果。相應程序設計如下:
#define N_AD 11
char filter(){
char value_buf[N_AD];
char count,i,j,temp;
for{count=0;count< N_AD;count++}
{value_buf[count]=get_ad();
delay();}
for(j=0;j for(i=0;i if(value_buf[i]>value_buf[i+1]){ temp=value_buf[i]; value_buf[i]=value_buf[i+1]; value_buf[i+1]=temp;}}} return value[(N_AD-1)/2]} 本系統的無線通信功能設計主要考慮通信控制端和STM32之間的通信鏈路[10],具體通信流程如圖4所示,STM32控制器和PS2控制端首先創建連接模式,然后控制器處于等待接收的狀態,即等待控制端發出連接請求,在其接收到控制端的連接請求后,STM32響應并與之連接,進入數據接收模式并判斷接收請求的狀態,之后進行控制端發送數據和STM32接收數據之間的交互,根據控制數據,由STM32執行相應的控制程序。 圖4 通信流程圖 根據上述設計,實現智能輔助植物培育履帶式移動機器人系統的實物如圖5所示,主要包括機械臂、控制器、履帶式底盤、無線模塊、攝像頭和多傳感器組等部分。 圖5 系統實物圖 實際作業情況如圖6所示。機器人移動過程中,如檢測到花盆會自動停下,圖6為機器人自動檢測到目標點1的花盆并停下檢測,機械臂帶動土壤濕度傳感器和土壤電導率傳感器插入土壤中以檢測相關數據,當實測值低于設定值時,通過水泵和導管進行噴灑用水或營養液。該目標點1的任務執行完畢后,機器人收回機械臂,繼續行駛至下一目標點2繼續作業,并以此方式逐一完成全部目標點作業。系統搭載攝像頭,通過Android手機端APP可以實時監測機械臂工作過程,通過PS2控制端可以遠距離人工控制機器人實施作業。通過系統實際測試及調整后,能夠完成上述園林培育作業任務要求。 圖6 實際作業情況圖3.2 無線通信設計

4 植物培育機器人系統實現


結 語
 猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23少年文藝·開心閱讀作文(2018年4期)2018-05-02 07:08:56科學大眾(中學)(2018年2期)2018-02-01 12:53:52紅領巾·萌芽(2017年5期)2017-06-23 10:35:59爆笑show(2016年7期)2017-02-09 09:36:13故事大王(2016年7期)2016-09-22 17:30:08少兒科學周刊·兒童版(2015年10期)2015-11-07 03:42:03少兒科學周刊·兒童版(2015年1期)2015-07-07 04:12:52中國火炬(2014年3期)2014-07-24 14:44:39兒童故事畫報(2013年3期)2013-06-24 05:40:30
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23少年文藝·開心閱讀作文(2018年4期)2018-05-02 07:08:56科學大眾(中學)(2018年2期)2018-02-01 12:53:52紅領巾·萌芽(2017年5期)2017-06-23 10:35:59爆笑show(2016年7期)2017-02-09 09:36:13故事大王(2016年7期)2016-09-22 17:30:08少兒科學周刊·兒童版(2015年10期)2015-11-07 03:42:03少兒科學周刊·兒童版(2015年1期)2015-07-07 04:12:52中國火炬(2014年3期)2014-07-24 14:44:39兒童故事畫報(2013年3期)2013-06-24 05:40:30
