基于農(nóng)業(yè)采摘的機(jī)械臂結(jié)構(gòu)設(shè)計(jì)研究
2018-08-10 11:00:32蒲筠果王志剛
農(nóng)機(jī)化研究 2018年9期
蒲筠果,王志剛 ,朱 良
(邢臺職業(yè)技術(shù)學(xué)院,河北 邢臺 054035)
0 引言
農(nóng)業(yè)采摘的機(jī)械臂是一個(gè)各構(gòu)件聯(lián)系緊密的運(yùn)動執(zhí)行部件,其采摘性能的高低決定農(nóng)業(yè)采摘的效率,因其可替代人工采摘,促進(jìn)采摘智能化發(fā)展。隨著機(jī)械采摘作業(yè)向精準(zhǔn)、高效發(fā)展,農(nóng)業(yè)采摘機(jī)械手中不斷地滲入先進(jìn)的控制技術(shù),對農(nóng)業(yè)采摘機(jī)械臂的動作水平要求也日益嚴(yán)格。為此,在先進(jìn)電機(jī)伺服控制、準(zhǔn)確反饋調(diào)節(jié)運(yùn)動軌跡的前提下,為達(dá)到較為滿意的自動避障及快速采摘目標(biāo),筆者從改善機(jī)械臂的本身結(jié)構(gòu)參數(shù)、結(jié)構(gòu)組合角度入手,對機(jī)械臂結(jié)構(gòu)的模塊化設(shè)計(jì)、增減自由度情況下的運(yùn)動進(jìn)行分析,并采用可適應(yīng)性的試驗(yàn)環(huán)境進(jìn)行驗(yàn)證性仿真模擬,以期望達(dá)到機(jī)械手臂良好的自動作業(yè)效果。
1 理論模型
農(nóng)業(yè)采摘的機(jī)械手理論模型建立在機(jī)械構(gòu)件自由度選取及構(gòu)成理論基礎(chǔ)上,可從機(jī)械動力學(xué)機(jī)構(gòu)設(shè)計(jì)的角度進(jìn)行結(jié)構(gòu)優(yōu)化。其機(jī)械臂運(yùn)動簡圖如圖1所示。其中,一套完整的機(jī)械臂組成應(yīng)當(dāng)包括腰部、肩部、大小臂、肘部、腕部等關(guān)節(jié);末端抓手配置反映靈敏的識別、傳輸、轉(zhuǎn)換、動作及輸出等控制裝置。機(jī)械臂在進(jìn)行采摘作業(yè)運(yùn)動的過程中,著重考慮保證位姿的準(zhǔn)確定位及位置補(bǔ)償?shù)淖钚』`差,并對各關(guān)節(jié)進(jìn)行零點(diǎn)設(shè)置。從機(jī)械動力學(xué)原理出發(fā),其理論模型可建立為

(1)
式中M(q)—機(jī)械臂運(yùn)動慣性矩陣;


G(q)—機(jī)械臂的重力向量;
T—機(jī)械臂承受驅(qū)動扭矩。

圖1 農(nóng)業(yè)采摘機(jī)械臂簡圖
建立位姿空間坐標(biāo)并得出機(jī)械臂運(yùn)動方位相對于運(yùn)動角度的矩陣方程,即
進(jìn)一步針對運(yùn)動矩陣R建立機(jī)械臂的末端執(zhí)行矩陣,即
機(jī)械臂節(jié)點(diǎn)運(yùn)動前后示意圖如圖2所示;其控制系統(tǒng)結(jié)構(gòu)如圖3所示。
機(jī)械臂在空間、位姿等運(yùn)動模型控制之下,形成其硬件與軟件控制系統(tǒng)結(jié)構(gòu)(見圖3),機(jī)械臂硬件結(jié)構(gòu)及軟件系統(tǒng)需相互配合。其中,裝置的優(yōu)化包括信號處理與反饋環(huán)節(jié),精確及時(shí)地感應(yīng)與機(jī)械臂各個(gè)關(guān)節(jié)的動作指令可實(shí)現(xiàn)預(yù)定采摘作業(yè)。

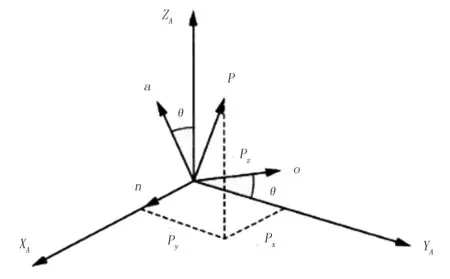
圖2 機(jī)械臂節(jié)點(diǎn)運(yùn)動前后示意圖

圖3 農(nóng)業(yè)采摘機(jī)械臂控制結(jié)構(gòu)系統(tǒng)圖
2 結(jié)構(gòu)設(shè)計(jì)
2.1 關(guān)鍵參數(shù)設(shè)定
進(jìn)行機(jī)械臂的結(jié)構(gòu)參數(shù)設(shè)定,主要是建立各個(gè)關(guān)節(jié)間的自由度聯(lián)系,確定旋轉(zhuǎn)角度和變化范圍,根據(jù)圖4所示的角度算法流程,進(jìn)行運(yùn)動跟蹤及軌跡監(jiān)測,自由度的多少可以適當(dāng)增減進(jìn)行參數(shù)化設(shè)計(jì),可選取在自由度5~7之間。
首先確定機(jī)械臂的類型及自由度,給出各個(gè)關(guān)節(jié)的形狀與尺寸,并通過對機(jī)械臂各項(xiàng)性能指標(biāo)參數(shù)進(jìn)行對比選取、關(guān)鍵數(shù)據(jù)信息采集與處理和關(guān)鍵構(gòu)件成分組成分析,確立是否進(jìn)行參數(shù)修改,最終得出最佳機(jī)械臂各關(guān)節(jié)滿足采摘性能的關(guān)鍵參數(shù),進(jìn)行結(jié)構(gòu)優(yōu)化設(shè)計(jì)。
設(shè)定機(jī)械臂的運(yùn)動條件數(shù)x1,機(jī)械臂各關(guān)節(jié)進(jìn)行采摘動作的運(yùn)動可操作性評價(jià)值x2,方向可操作性評價(jià)值x3,各關(guān)節(jié)協(xié)調(diào)性動作評價(jià)值x4,其它影響度小的綜合評價(jià)參數(shù)量x5,將此5個(gè)參數(shù)通過標(biāo)準(zhǔn)化轉(zhuǎn)換、因子載荷測試,進(jìn)而綜合評定,得出最佳化參數(shù)組合F,即

圖4 機(jī)械臂各關(guān)節(jié)運(yùn)動角度流程簡圖
2.2 誤差補(bǔ)償選取
農(nóng)業(yè)采摘機(jī)械手的機(jī)械臂在自動采摘作業(yè)時(shí)的采摘精度需要一定的誤差補(bǔ)償,主要是為了補(bǔ)償機(jī)械臂構(gòu)造組裝過程中的固有誤差和工作過程中速度傳遞、執(zhí)行定位誤差。因此,針對各關(guān)節(jié)在參數(shù)設(shè)定的基礎(chǔ)上建立相適應(yīng)的結(jié)構(gòu)參數(shù)誤差補(bǔ)償模型,主要體現(xiàn)在機(jī)械臂的末端抓手上,并使硬件補(bǔ)償與軟件補(bǔ)償相互配合。
降低機(jī)械臂的采摘作業(yè)誤差包括各關(guān)節(jié)的位姿轉(zhuǎn)換矩陣、變換及微分計(jì)算等,為保證運(yùn)動的穩(wěn)定與快速,參照實(shí)施一種機(jī)械臂各關(guān)節(jié)綜合誤差模型補(bǔ)償原則,將實(shí)際位姿與旋轉(zhuǎn)運(yùn)動矩陣合并為綜合末端抓手的誤差,通過系數(shù)修正來達(dá)到機(jī)械臂末端誤差補(bǔ)償,從而提高運(yùn)動采摘精度和可靠性。因篇幅有限,只給出補(bǔ)償前后的對比算法,即

2.3 差動轉(zhuǎn)向技術(shù)加入
在機(jī)械臂采摘作物或完成后進(jìn)行返回路徑過程中,加入機(jī)械臂關(guān)節(jié)的差動轉(zhuǎn)向技術(shù),可更好地對機(jī)械臂運(yùn)動軌跡實(shí)時(shí)監(jiān)視和反饋精確化控制。這其中需注重各關(guān)節(jié)驅(qū)動轉(zhuǎn)矩的分配設(shè)置比例和相關(guān)回轉(zhuǎn)、轉(zhuǎn)向定位慣性等因素的影響。機(jī)械臂的差動轉(zhuǎn)向控制簡圖如圖5所示。針對各關(guān)節(jié),可以采用多冗余的自由度關(guān)節(jié)控制,使機(jī)械臂采摘動作具有更高的柔韌度與可控可調(diào)節(jié)度。轉(zhuǎn)向的靈活性表現(xiàn)在軟件技術(shù)上,如內(nèi)部構(gòu)件差動連接進(jìn)行運(yùn)動控制,更依賴于關(guān)節(jié)本身的結(jié)構(gòu)選取。
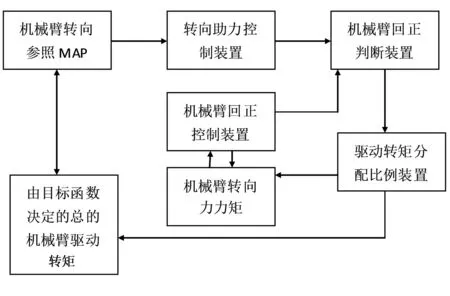
圖5 農(nóng)業(yè)采摘機(jī)械臂差動轉(zhuǎn)向控制
3 建模仿真分析
進(jìn)行三維機(jī)械臂建模,如圖6所示。同時(shí),對仿真試驗(yàn)預(yù)先設(shè)定:①一定的農(nóng)作物環(huán)境;②農(nóng)作物采摘對象;③確定一定的機(jī)械臂工作空間;④試驗(yàn)約束條件設(shè)置等。
此次機(jī)械臂設(shè)計(jì)優(yōu)化可最大限度減小機(jī)械臂的自重,同時(shí)進(jìn)行模擬受力分析,對于機(jī)械臂結(jié)構(gòu)材質(zhì)的選取進(jìn)行綜合考慮,對于材料的疲勞強(qiáng)度—彎曲極限強(qiáng)度等參數(shù)進(jìn)行不同程度的施加載荷試驗(yàn),針對構(gòu)件1~10,有側(cè)重點(diǎn)進(jìn)行應(yīng)力分析,如圖6所示。

1.基座 2、4、6、8、10.安裝電機(jī)部位 3、5、7、9.機(jī)構(gòu)連接部位
從圖6中可看出:對機(jī)械臂整體的采摘作業(yè)效率快慢影響的主要有構(gòu)件5與構(gòu)件7。基于通用的模擬人體手臂采摘的運(yùn)動機(jī)理及各關(guān)節(jié)部位出現(xiàn)的相對極值位置點(diǎn),通過專業(yè)ANSYS分析軟件對設(shè)計(jì)優(yōu)化后的機(jī)械臂進(jìn)行整體模型的有限元化分析,并對試驗(yàn)仿真過程中機(jī)械臂各關(guān)節(jié)進(jìn)行參數(shù)調(diào)整及優(yōu)化,得出機(jī)械臂采摘時(shí)的最佳運(yùn)動軌跡和相應(yīng)的模態(tài)狀況,截取部分構(gòu)件的分析圖,如圖7所示。
通過對機(jī)械臂各個(gè)結(jié)構(gòu)參數(shù)進(jìn)行合理匹配、精細(xì)優(yōu)化,具體節(jié)點(diǎn)運(yùn)動角度及運(yùn)動參數(shù)如表1所示。選取試驗(yàn)時(shí)間均為6s,記錄機(jī)械臂的初始位置與終止位置,其間的運(yùn)動速度與加速度有效值。由表1可知:在預(yù)定的結(jié)構(gòu)優(yōu)化參數(shù)下,整體機(jī)械臂進(jìn)行仿真,各個(gè)關(guān)節(jié)的協(xié)調(diào)性可達(dá)90%以上,能夠較好地執(zhí)行采摘動作,上下動作銜接良好,保證了機(jī)械臂構(gòu)造緊湊、動作靈活。
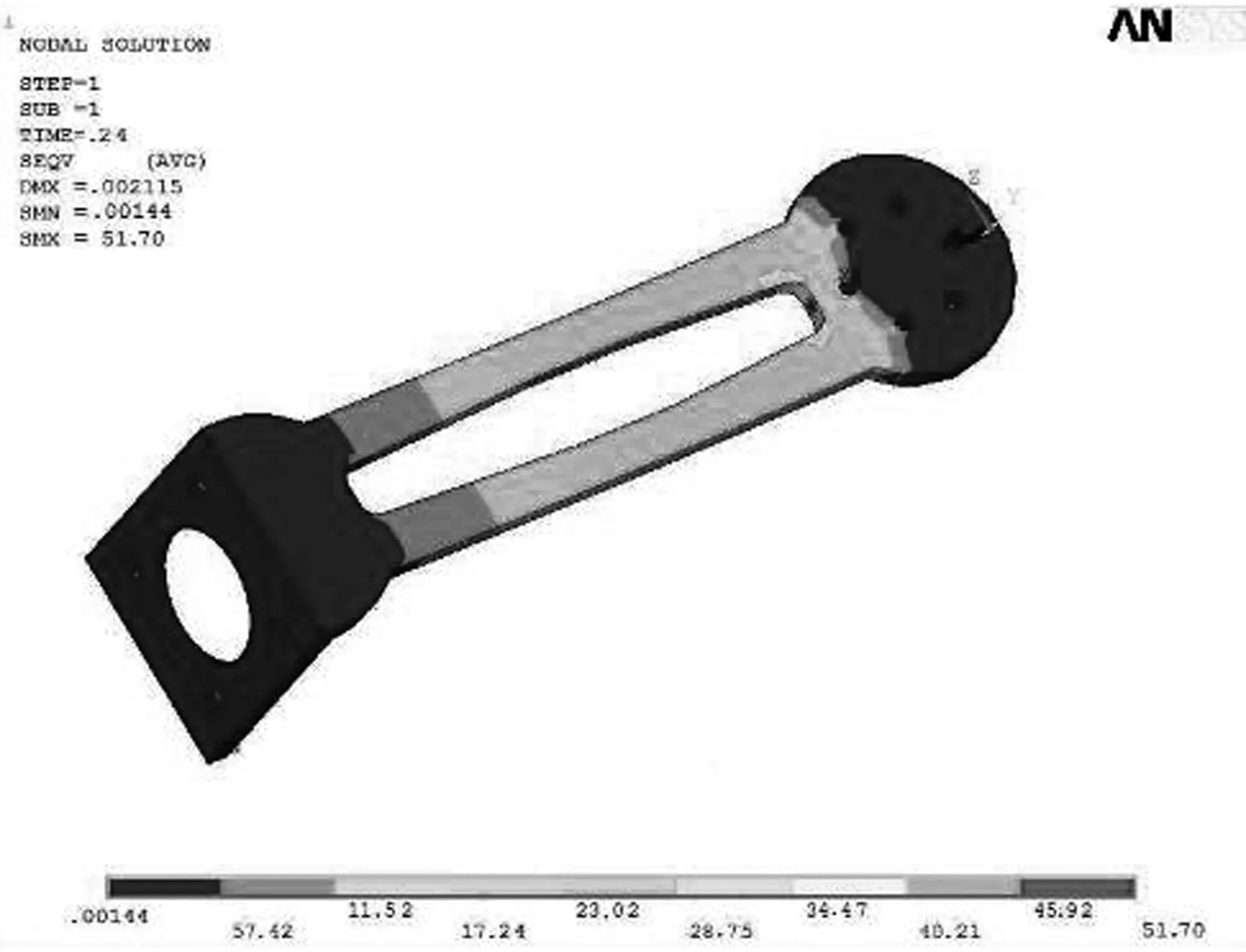

圖7 農(nóng)業(yè)采摘機(jī)械臂關(guān)鍵構(gòu)件應(yīng)力分布云圖
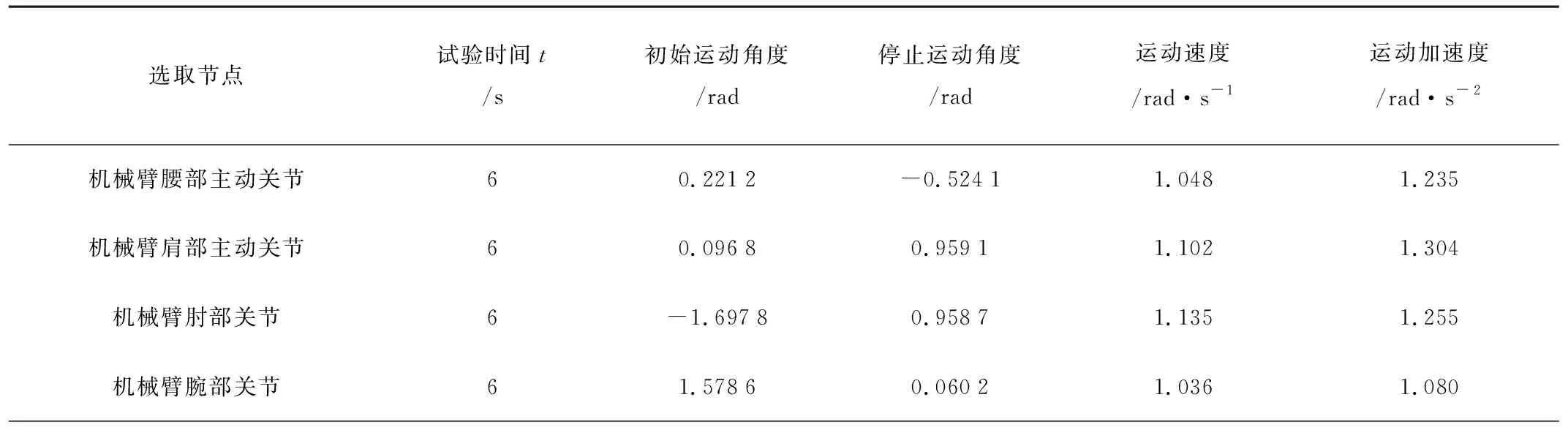
選取節(jié)點(diǎn)試驗(yàn)時(shí)間t/s初始運(yùn)動角度/rad停止運(yùn)動角度/rad運(yùn)動速度/rad·s-1運(yùn)動加速度/rad·s-2機(jī)械臂腰部主動關(guān)節(jié)60.2212-0.52411.0481.235機(jī)械臂肩部主動關(guān)節(jié)60.09680.95911.1021.304機(jī)械臂肘部關(guān)節(jié)6-1.69780.95871.1351.255機(jī)械臂腕部關(guān)節(jié)61.57860.06021.0361.080
4 結(jié)論
對農(nóng)業(yè)采摘機(jī)械臂的結(jié)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì),從分析其關(guān)節(jié)組成出發(fā),在深入了解機(jī)械臂采摘動作控制系統(tǒng)的前提下,通過對各關(guān)節(jié)進(jìn)行參數(shù)對比、選擇,形成綜合性評定函數(shù);之后進(jìn)行動作的誤差補(bǔ)償,以減小機(jī)械臂的誤差指數(shù);同時(shí),加入差動轉(zhuǎn)向控制技術(shù),從而達(dá)到更為精準(zhǔn)快速控制機(jī)械臂回轉(zhuǎn)、改變路徑的目的。在理論的模型指導(dǎo)下,模擬建立了農(nóng)業(yè)采摘機(jī)械臂三維實(shí)體運(yùn)動模型,獲取了結(jié)構(gòu)參數(shù)優(yōu)化后的應(yīng)力分布,并得出各關(guān)節(jié)相互協(xié)調(diào)動作的一致性率。實(shí)驗(yàn)證明了其結(jié)構(gòu)設(shè)計(jì)的可操作性。同時(shí),此研究思路可為其他農(nóng)業(yè)采摘機(jī)具的改進(jìn)提供相對的方向維度,并對于農(nóng)業(yè)采摘的各類機(jī)械臂結(jié)構(gòu)優(yōu)化有一定的參考價(jià)值,可更好地促進(jìn)機(jī)械臂采摘作業(yè)技術(shù)的提高。
猜你喜歡
今日農(nóng)業(yè)(2022年1期)2022-11-16 21:20:05
今日農(nóng)業(yè)(2022年3期)2022-11-16 13:13:50
今日農(nóng)業(yè)(2022年2期)2022-11-16 12:29:47
今日農(nóng)業(yè)(2021年14期)2021-11-25 23:57:29
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文評點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
科技知識動漫(2016年8期)2016-07-29 20:40:09

- 農(nóng)機(jī)化研究的其它文章
- 營養(yǎng)液循環(huán)灌溉紫外線消毒機(jī)設(shè)計(jì)研究
- 農(nóng)業(yè)機(jī)械化對農(nóng)業(yè)產(chǎn)業(yè)集聚的支撐研究
- 基于CFD技術(shù)的離心泵出口流態(tài)模擬及分析
- 基于包容性檢驗(yàn)的新疆兵團(tuán)農(nóng)機(jī)總動力組合預(yù)測
- 基于農(nóng)機(jī)農(nóng)藝融合的大蔥機(jī)械化移栽關(guān)鍵技術(shù)研究
- 拖拉機(jī)設(shè)計(jì)應(yīng)用服務(wù)提供商模式網(wǎng)絡(luò)化設(shè)計(jì)安全研究