4UMS-1800型木薯起薯收獲機提升裝置的設計
2018-08-10 10:58:10黃應強鄧干然呂以志崔振德李國杰蘇會榮李曉菲
農機化研究 2018年9期
關鍵詞:作業
李 玲,黃應強,鄧干然,呂以志,崔振德,李國杰,鄭 爽,蘇會榮,李曉菲
(1.中國熱帶農業科學院 農業機械研究所,廣東 湛江 524091;2.湛江市農業技術推廣中心,廣東 湛江 524038;3.農業部熱帶作物農業裝備重點實驗室,廣東 湛江 524091)
0 引言
木薯(Manibot esculenta Crantz.),灌木狀多年生作物,世界三大薯類作物(木薯、馬鈴薯、甘薯)之一,廣泛栽培于熱帶和亞熱帶地區,于19世紀初引入我國,目前在我國的廣東、廣西、海南、云南等地均有廣泛種植[1-2]。木薯可食用、飼用和提取淀粉,據統計,我國木薯種植面積達到40萬hm2以上,在我國的南亞熱帶地區,木薯是僅次于水稻、甘薯、甘蔗、玉米的第五大作物。在我國木薯主要種植區域,木薯的收獲主要采用人力、畜力挖掘的粗放作業方式及較少量的半機械化作業方式,而木薯的收獲過程勞動強度極大,目前的生產方式效率低下且作業成本較高,因此研究木薯收獲機械及其配套設備具有極其重要的意義[3-5]。
木薯塊根收獲機械的主要方式有挖掘松土加振動分離、挖掘式及挖掘松土加拔起分離3種方式[6],挖掘松土加振動分離的方式功耗過大,如4UM-160型木薯收獲機[7]、LW-60型木薯收獲機[8]屬于此類型。挖掘式半機械化木薯收獲機械是目前我國研究與應用最普遍的木薯收獲機,如廣西武鳴縣農機局研制的木薯收獲機[9]、中國熱帶農業科學院農業機械研究所的薛忠等人研制的4UMS-390型木薯收獲機[10]、張意松等人研制的4UMS-900型木薯收獲機[11]等均采用半機械化的方式收獲木薯。即拖拉機牽引挖掘鏟使得土壤下的木薯松動,再人工撿拾的收獲方法,雖在一定程度上提高了木薯收獲效率,但人工勞動強度依然很大。挖掘松土加拔起分離方式的木薯收獲機功耗較小,且能有效提升作業效率,但在木薯撿拾與夾持輸送上的難度較大,孫佑攀等人[12]設計了4UMS-1型木薯收獲機即采用了此種方式。該收獲機由木薯挖掘和夾持輸送兩部分組成,夾持輸送部分采用多楔帶的雙帶式夾持裝置,因田間作業的復雜性及多楔帶承受徑向力能力有限,作業過程中存在皮帶損壞或掉帶的現象。綜上所述,挖掘松土加拔起分離式的木薯收獲機具有明顯的優勢,因此突破木薯撿拾與夾持輸送的瓶頸,對應用于木薯起薯收獲機上的提升裝置的研究具有重要的意義。
4UMS-1800型木薯收獲機是中國熱帶農業科學院農業機械研究所研制的雙行挖掘式木薯收獲機,在借鑒前人木薯收獲機及根莖類作物收獲機結構的基礎上設計了配套于該機型的木薯提升裝置,以達到將松土后的木薯拔出地表的目的。
1 設計原理及機構
1.1 設計原理
針對當前木薯收獲過程中起薯難度大、人工刨土撿拾勞動強度大、工作效率低的問題,中國熱帶農業科學院農業機械研究所在已有4UMS-1800雙行挖掘式木薯收獲機基礎上研制了帶有彈性夾持機構的木薯提升裝置,將挖掘鏟掘松的木薯通過提升裝置提升出地表。木薯提升裝置工作狀態如圖1所示。

1.連接架 2.提升裝置 3木薯 4地面
木薯提升輸送裝置是將土壤與木薯分離,使得木薯升運到土壤表面的裝置,木薯提升輸送裝置以大功率拖拉機作為牽引動力,以已研發并推廣使用的4UMS-1800型木薯起薯收獲機為基礎,通過連接架與4UMS-1800型挖掘式木薯起薯收獲機焊接在一起,協同作業。
4UMS-1800型挖掘式木薯起薯收獲機通過三點懸掛機構后懸掛于拖拉機上。木薯提升裝置的工作狀態如圖2所示。其中,提升裝置與水平面呈20°夾角,其動力來自拖拉機后輸出軸。田間作業時,木薯留茬30cm左右,通過地輪對地面進行仿形以控制收獲機入土深度,由4UMS-1800型木薯起薯收獲機的起薯鏟先起松木薯周邊土壤,由木薯提升裝置夾持木薯桿帶動木薯提出地表。
該機具與66kW拖拉機配套使用,采用了彈性夾持機構的設計實現木薯莖稈的夾持,能顯著提高木薯收獲過程中的明薯率、降低作業能耗及人工作業強度。
1.2 總體設計
木薯提升裝置主要由機架、傳動系統、夾持機構幾個部分組成,如圖2所示。該提升裝置為雙行式,主要結構包括連接板、傳動鏈輪、傳動鏈條、夾持鏈條、壓縮彈簧、壓緊輪、張緊輪以及齒輪、減速裝置等。
作業時,木薯稈由提升裝置右端入口處進入,在夾持鏈條前端V形入口處逐漸收入兩條夾持鏈中間,在壓緊輪和夾持鏈條的共同作用下夾緊木薯稈向上提升,并向提升裝置尾部傳輸,最終將起松的木薯拔出地表。
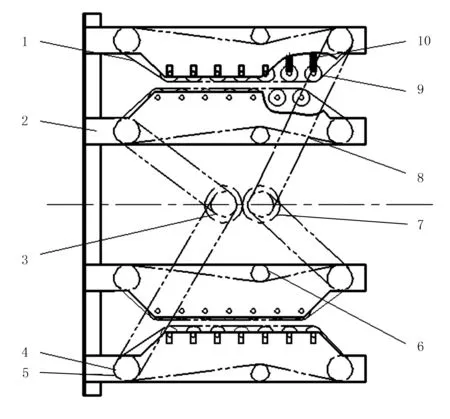
1.傳動鏈條(單排) 2.連接板 3.傳動鏈輪(假雙排) 4.傳動鏈輪(雙排) 5.傳動鏈輪(單排) 6.壓緊輪 7.齒輪 8.張緊輪(雙排) 9.夾持鏈條(雙排帶、節節帶彎折板) 10.壓縮彈簧
其主要技術參數如下:
外形尺寸/mm:1 057×1 434×257
工作幅寬/mm:雙行(1 800)
提升高度/cm:17(理論)
配套動力/kW:66
提升速度/m·s-1:1.817 (理論)
2 關鍵部件的設計
2.1 傳動系統設計
木薯提升裝置動力來源于拖拉機后輸出軸,其傳動系統主要包括萬向節聯軸器、錐齒輪減速器、齒輪、鏈輪及鏈條等,如圖3所示。

1.萬向聯軸器 2.雙排鏈輪 3.夾持鏈條 4.鏈輪 5.鏈條 6.齒輪 7.減速器
工作時,拖拉機后輸出軸輸出的動力經過萬向聯軸器傳遞給錐齒輪減速器,經錐齒輪減速器減速并變向90°后傳遞給齒輪(齒輪為兩個齒數模數相同的齒輪,兩齒輪轉速相等、轉向相反),動力經齒輪的軸傳遞給鏈輪,經過單排鏈輪、鏈條、雙排鏈輪和帶動夾持鏈條運動。
綜合考慮傳遞力矩、垂直方向受力及使用壽命等因素,選取傳動鏈節距15.875,傳動鏈輪齒數19。
木薯收獲機工作時的行進速度Vm為3.6 ~4.8km/h,為了保證木薯的順利夾持與提升,提升裝置夾持鏈傳輸速度Vl的水平分量應大于木薯收獲機前進速度Vm,即
Vl·cosα>Vm
Vl>Vm/ cosα=1.417m/s
式中Vl—提升裝置夾持鏈條傳輸速度;
Vm—4UMS-1800雙行挖掘式木薯收獲機工作狀態下行進速度;
α—提升裝置傾斜角度。
該裝置擬采用66kW拖拉機帶動,拖拉機后輸出軸轉速為720r/min,采用減速比1∶2的錐齒輪減速后根據計算分析,夾持鏈的傳輸速度為1.817m/s,其水平分量為1.707m/s,大于收獲機行進速度,能夠與4UMS-1800型挖掘式雙行木薯收獲機配合使用。
2.2 柔性夾持裝置設計
2.2.1 壓緊輪的設計
木薯莖稈分為表皮和芯部兩部分,表皮組織較硬、纖維沿軸向分布,芯部較軟,是一層海綿狀的組織。
木薯莖稈承受徑向壓力與木薯稈的粗細呈線性關系,木薯莖稈下部較粗,徑向抗壓強度較大。薛忠等人[13-14]測得收獲期華南205木薯品種(樣品采自湛江市麻章區)莖稈下部徑向壓縮平均抗壓強度為0.82MPa。
根據木薯莖稈結構及其受力特點,該木薯提升裝置采用了節節帶彎折板的雙排鏈條作為夾持鏈的夾持機構。相對于普通皮帶、多楔帶等,雙排鏈條具有較好的承受徑向壓力的能力,不易斷裂。同時,彎折板為直接夾持木薯莖稈的部件,每節鏈條上安裝的彎折板分為上下兩片,兩條夾持鏈構成兩對彎折板對木薯桿進行夾持的狀態,增大了與木薯莖稈受力面積。
夾持裝置如圖4所示。工作時,以雙排鏈輪作壓緊輪,起到壓緊和承托鏈條的作用,兩側壓緊輪大小相等,轉向相反,采用交錯安裝的形式,一側壓緊輪固定,另一側壓緊輪通過彈簧調整位置構成彈性夾持,夾持鏈間距25mm,在提高木薯桿通過性的同時有效降低了機構的復雜程度。
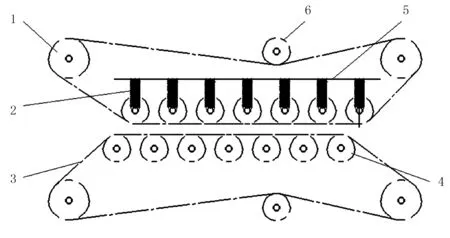
1.雙排鏈輪 2.彈簧 3.夾持鏈條 4.壓緊輪 5.擋板 6.張緊輪
彈性夾持結構示意圖如圖5所示。根據設計要求,工作狀態下,夾持鏈間距在25~45mm范圍內可調,可夾持30~45mm范圍的木薯莖稈,即彈簧的壓縮量L在5~20mm范圍內有效夾持木薯莖稈,可保證木薯莖稈較好的夾持性與通過性。
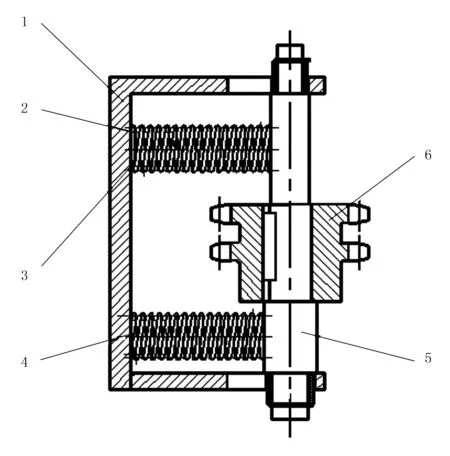
1.擋板 2.芯軸 3.彈簧(上) 4.彈簧(下) 5.壓緊輪軸 6.壓緊輪
根據壓縮彈簧系數為
k=G·d4/(8D3·Nc)
式中G—為線材的剛性模數;
d—線徑;
D—中徑;
Nc—有效圈數。
夾持力為
F=2k·L
式中L—彈簧壓縮長度。
夾持裝置對木薯桿的提升力為
f=u·F=2u·G·d4/(8D3·Nc)·L
式中u—彎折板對木薯桿的摩擦因數。
綜合考慮彎折板對木薯摩擦力、木薯莖稈承力能力與木薯質量等因素,選取彈簧線徑2.5mm,中徑20mm,線圈圈數6.5(有效圈數4.5)。
2.2.2 夾持鏈有效夾持長度的確定
木薯塊根在地下分布的深度一般為20cm左右,木薯收獲機的挖掘鏟在松動木薯周邊土壤的過程中同時在一定程度上抬升木薯,木薯提升裝置的提升高度在15~20cm之間比較合適。夾持鏈有效夾持長度是兩側壓緊輪能同時對木薯稈進行夾持的長度區域,設計夾持鏈有效夾持長度為495mm,夾持鏈傾斜角度為20°,使得木薯提升高度為17cm。
3 田間試驗與結果
初步田間性能試驗于2016年年底,在位于湛江市麻章區湖秀路3號的木薯試驗地進行。試驗地基本條件如下:
土壤類型為我國熱帶、亞熱帶地區典型的紅壤土;木薯品種為南植199;木薯種植方式為機械化平種;種植行距為900mm;種植株距為600mm;留茬高度為300mm。
試驗結果表明:整機能夠在留茬木薯地進行收獲作業,相較以往的4UMS-1800型雙行挖掘式木薯收獲機,顯著提高了明薯率,明薯率達到70%以上,減輕了人工撿拾的勞動強度,降低了漏收率;夾持裝置能夠通過夾持木薯莖稈提升木薯,其夾持性能滿足木薯莖稈的夾持要求。
經過試驗發現,木薯提升裝置在作業過程中主要存在以下幾個方面的問題:
1)對倒伏木薯莖稈的夾持能力較差,倒伏木薯莖稈無法進入提升裝置入口。
2)對行精確性要求較高,當行不直、行距不一致、機手對行不準等情況時,莖稈無法進入夾持鏈中。
3)黏性土壤、雜草較多環境下,提升裝置入口處易形成堵塞。
4 結論與討論
創新性地設計了木薯提升裝置彈性夾持機構,可配合4UMS-1800型雙行挖掘式木薯收獲機進行木薯收獲,顯著提高了明薯率,降低了人工撿拾勞動強度,提高了工作效率。同時,相對于振動分離式的木薯挖掘收獲機動力消耗小,配置上提升裝置的4UMS-1800雙行挖掘式木薯收獲機可配套66kW拖拉機使用。
針對當前存在的問題,后續需在木薯種植農藝和提升裝置結構上進行優化與改進。
1)在木薯種植農藝方面:采用機械化種植,保證種植行距、株距的一致性;加強木薯田間管理,及時除草,避免雜草太多導致的機具堵塞,為木薯機械化收獲創造良好的田間條件。
2)在木薯提升裝置方面:增加自動對行裝置,提高對行的準確性,減輕拖拉機手人工對行的難度;改進4UMS-1800雙行挖掘式木薯收獲機的限深裝置或安裝深度自動控制裝置,控制機具的挖掘深度,避免挖掘過深造成的機具堵塞和挖掘過淺造成的木薯斷裂。
針對倒伏木薯莖稈夾持能力差的問題,在木薯提升裝置入口處增加扶正機構,提高木薯莖稈的通過率。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
