自主行走拖拉機道路識別與路徑導航
——基于激光掃描測距
2018-08-10 10:58:18陳玉樓
農機化研究 2018年9期
陳玉樓
(洛陽職業技術學院,河南 洛陽 471003)
0 引言
實現拖拉機導航的方案有很多:如用于軌道、壟溝行走的方案,這種方案要求道路具有特定的構型;磁條/色帶引導行走的方案,這種方案則要求道路上設有引導帶,如果將這些方案使用在自主導航拖拉機設備上,均存在一定局限性,難以引導拖拉機進行靈活的自主移動。相比之下,用于無明顯引導標志的普通路面的導航方案具有突出的環境適應性強的特點,受到了許多學者的關注。通常該類方案的核心算法分為兩部分:一部分為道路邊緣提取;另一部分為導航方向控制指令生成。道路邊緣的提取本次采用了激光測距掃描的方法,而航向采用了Sobel算子方向角比對的方法,最后通過控制左右輪的速度,實現航向的控制。
1 自主行走拖拉機總體設計
基于路徑識別的拖拉機自主行走驅動方法較多,常用的是中心線算法,但這種算法具有一定的局限性。在實際作業時,田間不可能劃分太多的中心線,如果設計一種方案可以直接將道路和農作物區分開,在行走時有效避開農作物,可以大大提高自主行走的能力和導航的效率。利用激光測距掃描的方法,可以實時地對路面和前方障礙物情況進行掃描,當遇到障礙物時,激光掃描得到的波形會劇烈變化,利用這一原理,可以實現路徑識別和導航,如果將其使用在自主導航拖拉機設備上,可以有效提高導航效率。其基本框架如圖1所示。

圖1 基于激光測距的拖拉機導航設計框架
將激光測距掃描儀安裝在拖拉機自主導航設備上,可以有效區分道路邊緣和作物的邊緣,利用Sobel算子可以標定圖像的方向角,為方向導航提供準確的信息,其導航的基本流程如圖2所示。拖拉機路徑識別主要利用激光掃描測距的方法,通過激光掃描波形的反饋,可以區分道路和農作物,然后對掃描圖像進行比對,利用Sobel算子,得到基本的航向角,最后完成路徑識別和導航。
2 基于激光測距的道路識別與路徑導航算法
基于激光測距在進行道路識別時,由于道路兩旁有農作物,在掃描到道路和作物時,會呈現出不同的特點,這是由于道路的地勢較為平坦,因此掃描得到的波形波動性會較小。當掃描到農作物時,由于農作物形狀并不平坦,得到的波形波動會比較大,拖拉機可以根據激光測距掃描反饋回來的波形,識別道路,并進行自主導航。為了使拖拉機通過激光測距掃描得到更加精確的道路識別信息,利用圖像處理的方法,對圖像背景進行去除,保留關鍵信息。假設通過掃描得到數據為A,去除的掃描背景為B,去除后的數據為C,則有
C=A-B
(1)
其中,A表示拖拉機在理想的水平面上掃描得到的數據。因為在農田環境下,很難找到理想的水平面環境,于是將拖拉機放置在理想的實驗環境下,激光掃描得到的激光序列如圖3所示。
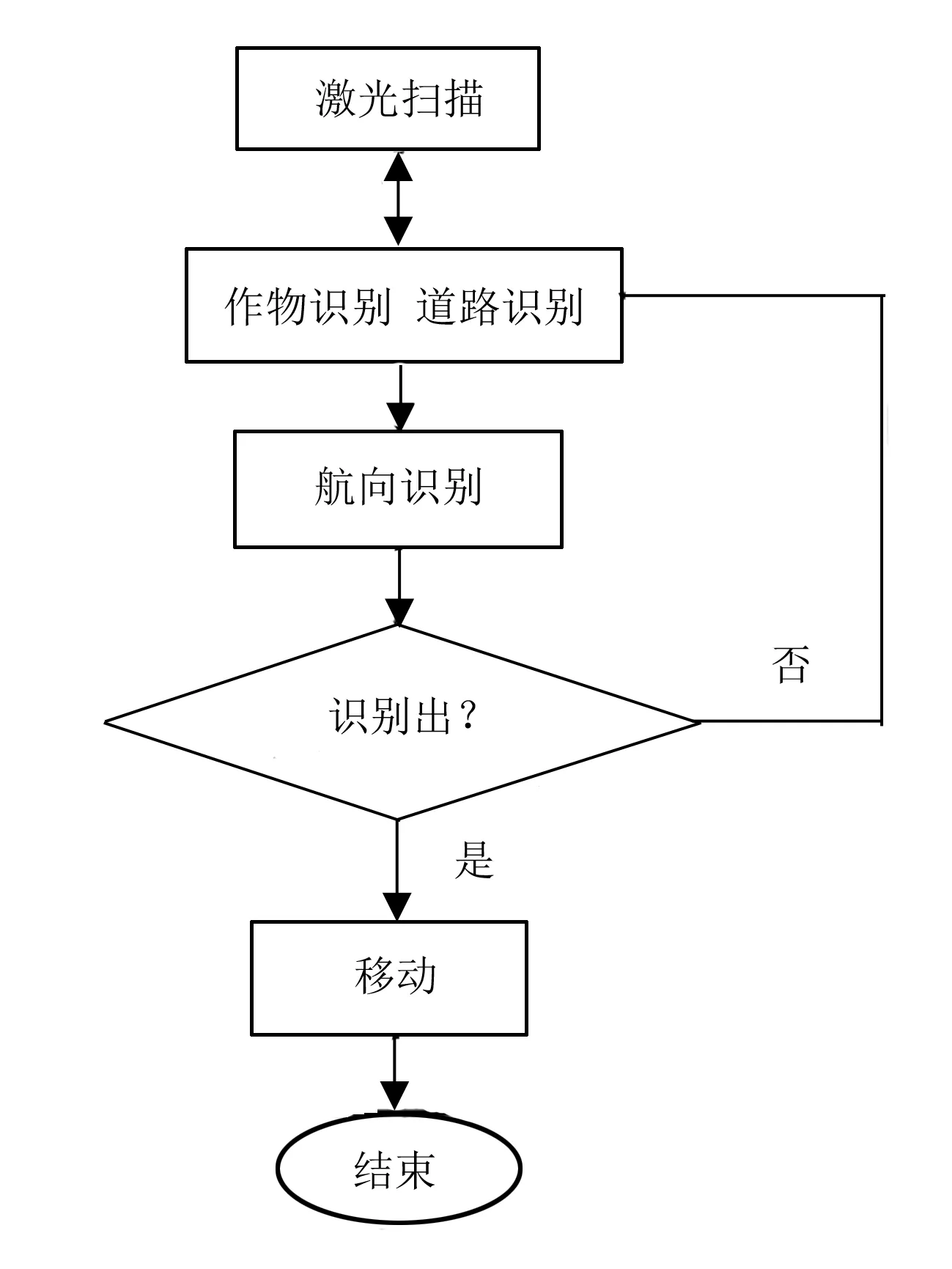
圖2 拖拉機路徑識別和導航基本流程

圖3 激光掃描序列
由圖3可以看出:在掃描到道路時,其波形比較平坦,變化較為緩慢,而當掃描到農作物時,波形會出現劇烈的波動,從而可以有效地區分道路和農作物。
采用二值化處理可以增強圖像的關鍵信息,使得到的結果更加準確。在進行二值化時,可以將前景值點灰度值設置為255,背景點灰度值為0,在r×r鄰域內,二值化計算公式為
T(x,y)=m(x,y)+k·s(x,y)
(2)
其中,T(x,y)表示像素點的閾值;m(x,y)表示像素點的均值;s(x,y)表示像素點的標準差;k表示修正系數。假設像素點(i,j)處的灰度值為f(i,j),則
(3)
(4)

(5)
導航方向采用計算比對的方法,計算比對算子有很多,本次主要使用的是Sobel算子,Sobel算子在許多圖像處理軟件中都有所集成,在進行亮度比對方向角度時,其誤差較小。水平和垂直方向的Sobel表如圖4所示。
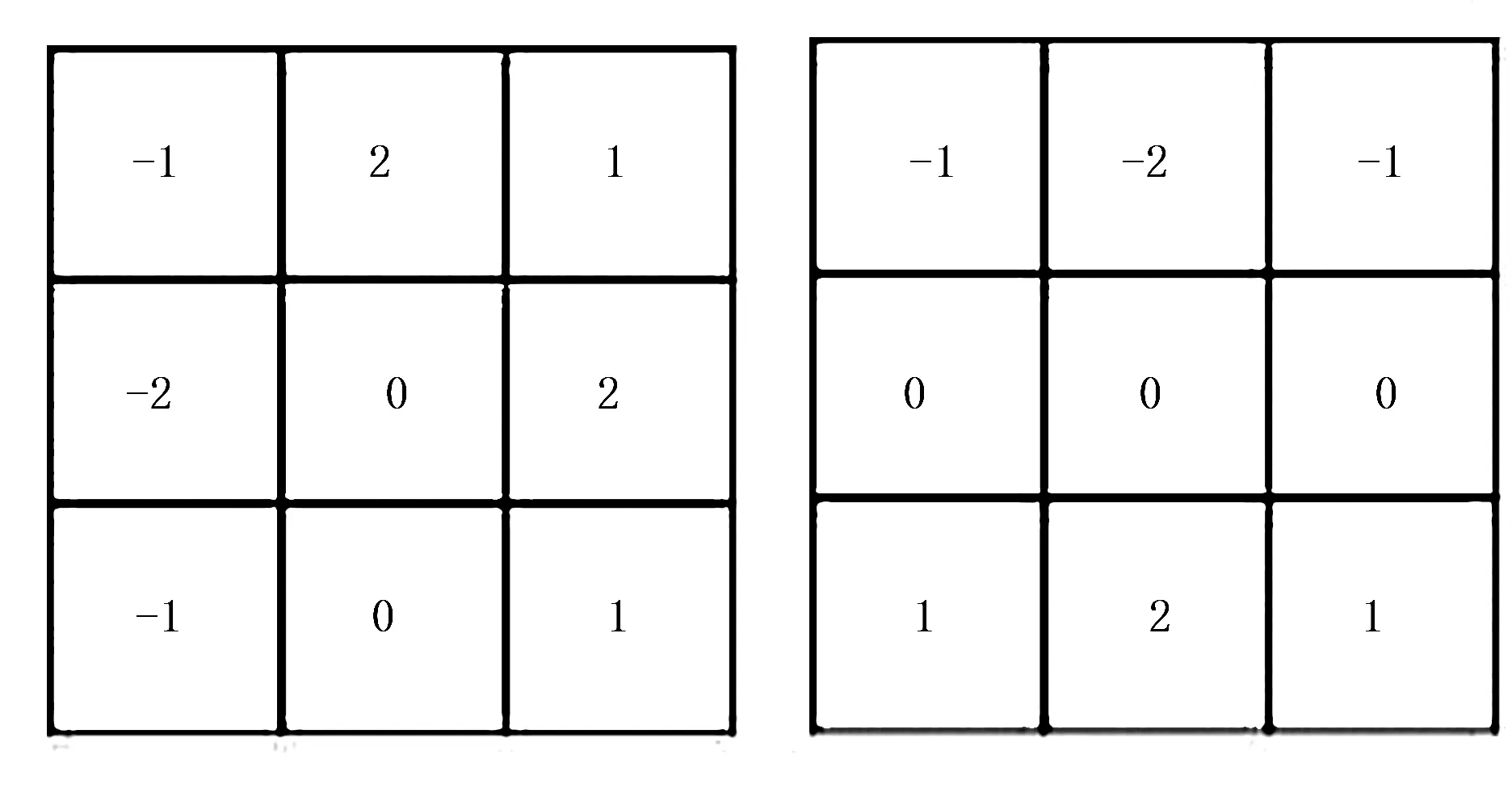
圖4 水平和垂直方向的Sobel表
利用像素點旁邊的8個像素進行驗算,然后求出導航方向角度,其符號用cxy表示,是θxy量化Δθ后,根據符號數N比對的符號,其表達式為
(6)


圖5 方向符號化量化幅度選值表
由圖5中選擇對比值之后,利用Sobel算法確定基本的航向,確定好航向后,轉換為拖拉機的左輪和右輪不同的速度之差,從而控制拖拉機沿著正確的方向行走。
3 拖拉機道路識別和路徑導航實驗
為了驗證激光測距在拖拉機道路識別和路徑導航上使用的可行性,在實驗室環境中,創設了拖拉機田間仿真環境,并在拖拉機模型上安裝了激光測距儀,進行了道路識別和路徑導航實驗,如圖6所示。
為了仿真理想的農田作業環境,使掃描的壟間較為平坦,采用了理想的實驗環境、在農機模型上安裝了激光掃描設備,農機模型如圖7所示。
在模型上安裝了激光掃描儀,然后利用航向符號比對進一步提高導航的準確性。通過實驗測試,得到了如圖8所示的結果。
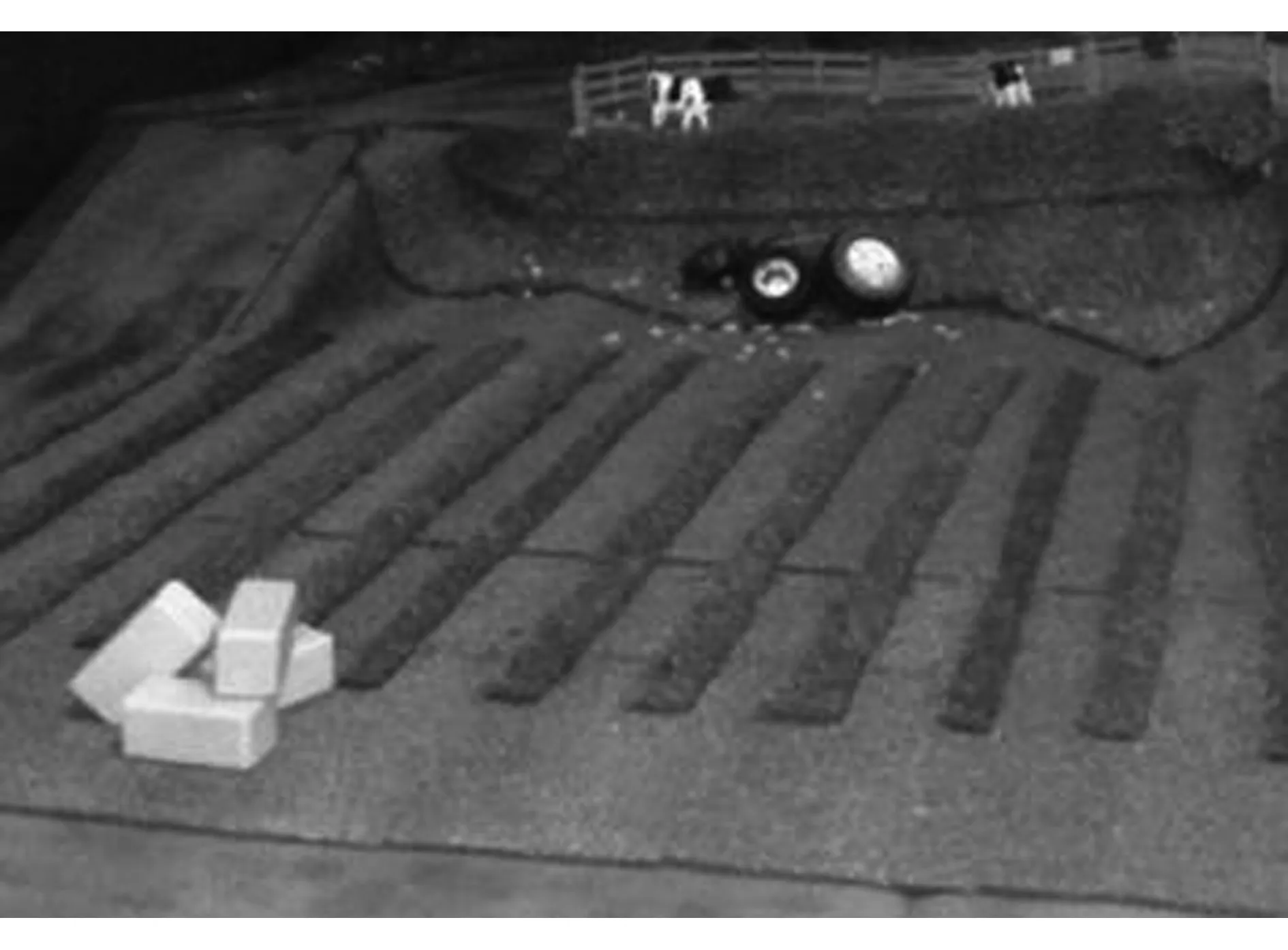
圖6 拖拉機模型道路識別和路徑導航實驗

圖7 實驗導航拖拉機模型

圖8 拖拉機導航測試結果
首先對簡單的單壟間行走進行了測試,結果表明:拖拉機可以準確按照圖中叉號所表達的位置完成自主導航。為了進一步研究其導航的可靠性,利用復雜的多壟間行走對拖拉機進一步地進行了測試,得到了如圖9所示的結果。
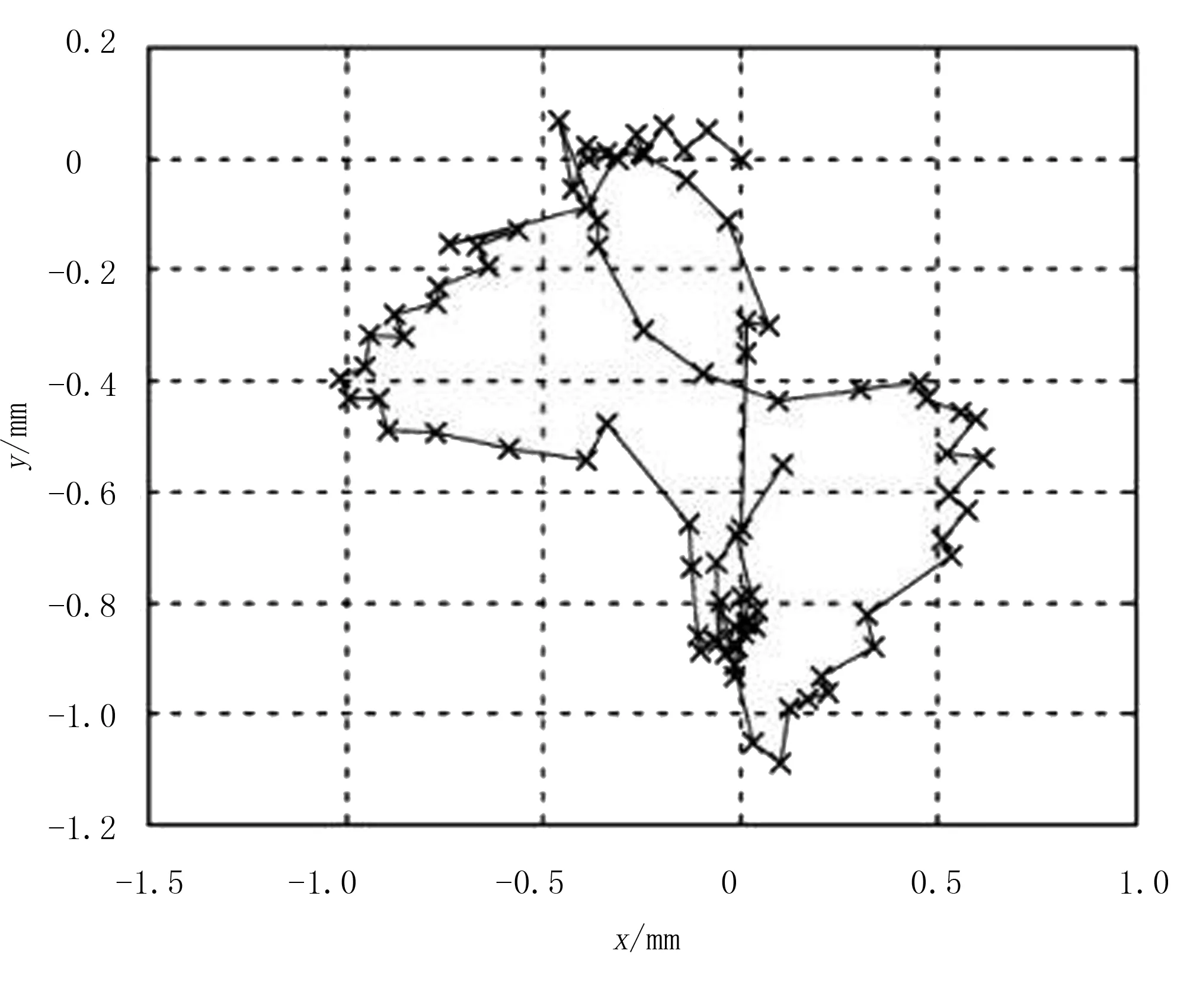
圖9 復雜作業環境的導航實驗
為了增加導航的難度,采用跨壟間導航實驗,對拖拉機導航的準確性進行驗證,結果表明:利用激光掃描技術,拖拉機可以準確地完成復雜的多壟間行走自主導航。
為了進一步驗證基于激光掃描的拖拉機自主導航算法的優越性,對傳統方法和激光測距導航算法得到的道路識別與路徑導航誤差進行了對比,如表1所示。由對比結果表明:采用激光掃描測距導航算法得到的路徑識別的誤差更小,導航更加準確。

表1 道路識別與路徑導航誤差統計
4 結論
為了提高拖拉機的導航效率,基于激光掃描測距和Sobel算子,設計了一款準確性較高的拖拉機自主路徑識別和導航的方案,并對該方案進行了驗證。通過激光掃描,可以有效地區分開道路和農作物,得到了準確的道路邊緣,道路邊緣的提取確定了拖拉機的移動方向,確保了拖拉機一直沿著道路行走,不偏離道路區域而碾壓農作物。利用機器視覺確定航向,進一步提高了導航的準確性,相比傳統算法,其導航的誤差降低了一倍以上,具有較高的導航精度,因此將基于激光掃描測距和機器視覺兩種方法應用在拖拉機自主導航方案上,對于提高導航準確性和導航效率具有重要的作用。
