基于終端速度約束的助推-滑翔飛行器滑翔彈道設計方法
2018-08-16 06:57:42卜奎晨趙長見許澤宇
導彈與航天運載技術 2018年4期
關鍵詞:設計
卜奎晨,趙長見,趙 洪,高 峰,許澤宇
(中國運載火箭技術研究院,北京,100076)
0 引 言
助推-滑翔飛行器采用火箭助推,利用滑翔體良好的氣動外形,在大氣層內超高速飛行,可實現全球快速打擊。由于其滑翔飛行彈道位于臨近空間,具有較強的機動能力和突防能力,是近年來世界主要軍事大國的研究熱點。但其助推-滑翔飛行器飛行彈道低、速度快,飛行環境惡劣,導致彈道、控制設計難度較大。
中國在助推-滑翔飛行器領域研究取得了較多的研究成果。在彈道設計方面,雍恩米等[1]針對助推-滑翔式導彈自由飛行段、稠密大氣和稀薄大氣之間彈道、滑翔彈道的射程近似解開展研究,為射程和峰值熱流等特征參數估算提供了依據;楊錚等[2]采用序列二次規劃法(Sequential Quadratic Programming,SQP)完成助推-滑翔導彈助推段彈道優化,為獲得滑翔段起始點最大動能和實現彈道順利銜接提供了解決方案;徐申達等[3]針對再入大氣層后帶動力的跳躍式飛行彈道進行了研究,針對發動機點火次數、點火高度及推力大小的影響開展了分析,得到有益的結果;李瑜等[4]針對SANGER再入-跳躍式彈道[5]、助推-滑翔-彈跳式彈道進行了對比分析,表明再入-跳躍式彈道對提高射程能力更為有利,但會極大提高駐點熱流峰值,對熱防護不利,而助推-滑翔-彈跳式彈道射程較優,且駐點熱流峰值滿足約束要求。
目前,中國學者針對助推-滑翔式導彈彈道模式及彈道優化設計方面進行了廣泛而深入的研究,但在彈道設計上多是采用優化方法(如SQP等)給出尋優結果,缺乏對魯棒性較好的滑翔段彈道設計方法進行研究。在實際工程應用中,由于飛行器本身質量特性、發動機性能及氣動參數等存在偏差,以及飛行過程中大氣干擾的存在,在一定程度上造成滑翔起始點存在位置、速度偏差。此外,實際飛行彈道偏離理想彈道將會導致落地速度存在偏差,需要開展落地速度控制方法研究,從而滿足對目標的打擊需要。
目前對于無動力滑翔式飛行器的終端位置控制具有較為成熟的方法,而對于速度控制的方法較少。滑翔彈道一般有平衡滑翔和跳躍滑翔兩種方式,為研究問題方便,本文針對平衡滑翔彈道,即錢學森式[6]助推滑翔彈道(見圖 1)進行研究,給出基于終端速度約束的滑翔彈道設計方法,該方法具有一定魯棒性,為實現偏差情況下的滑翔彈道和終端速度控制聯合設計提供了工具。
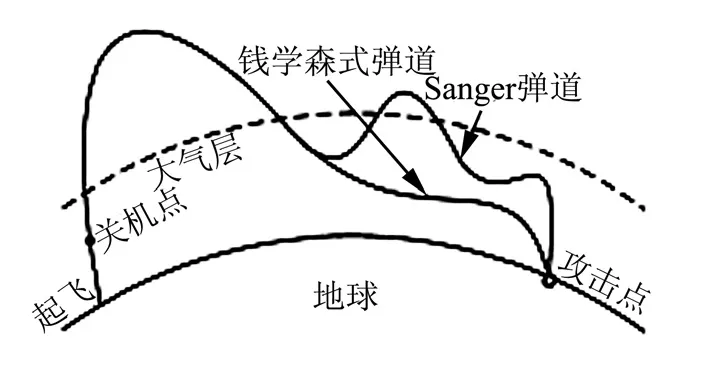
圖1 “錢學森式”助推滑翔彈道Fig.1 TSIEN H.S.-trajectory for Boost-glide Vehicle
1 滑翔射程及滑翔終端速度計算
對于在大氣層內飛行的滑翔式飛行器而言,滑翔飛行彈道影響滑翔終端速度,由于不同滑翔高度的氣動阻力不同,在滑翔距離一定的情況下不同滑翔高度對應的滑翔終端速度也不同,二者是緊密耦合的關系。為了實現滿足滑翔終端速度約束的滑翔彈道設計,需要解決滑翔射程和滑翔終端速度的快速工程計算問題。
1.1 平衡滑翔射程計算
為了開展平衡滑翔射程快速計算,進行如下簡化假設[2]:
a)不考慮地球旋轉,即eω=0;
c)滑翔式飛行器無側滑,即β=0。
在滑翔式飛行器的滑翔軌跡平面內建立發射坐標系 O-xyz和速度坐標系見圖2。
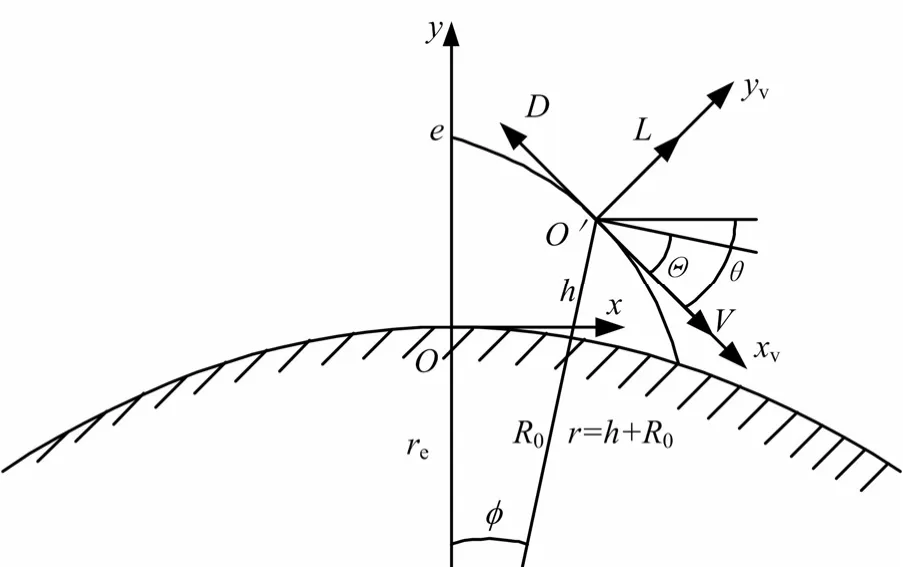
圖2 滑翔飛行角度關系示意Fig.2 Angles Relationship of Gliding Flight
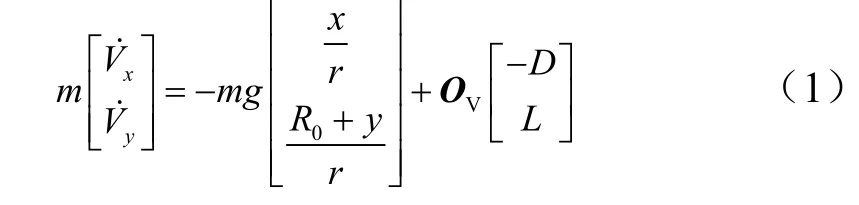
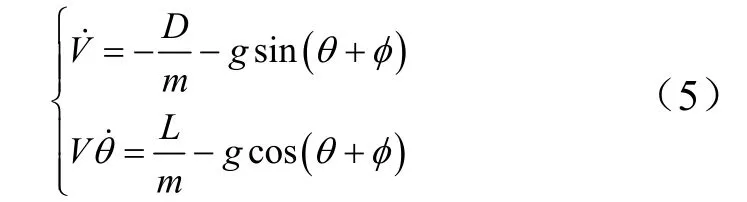
在發射坐標系-Oxyz建立運動方程:

由圖2,有:
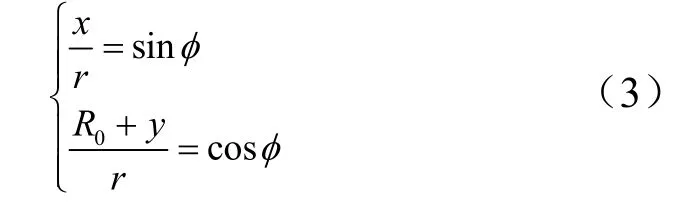
式中φ為er與r之間的夾角,稱為射程角,其中,er為滑翔起點距地心的矢徑。
將式(2)、式(3)代入式(1)可得:

進一步轉換到速度坐標系,將式(4)兩邊同乘以矩陣VO的轉置矩陣OV,整理得:
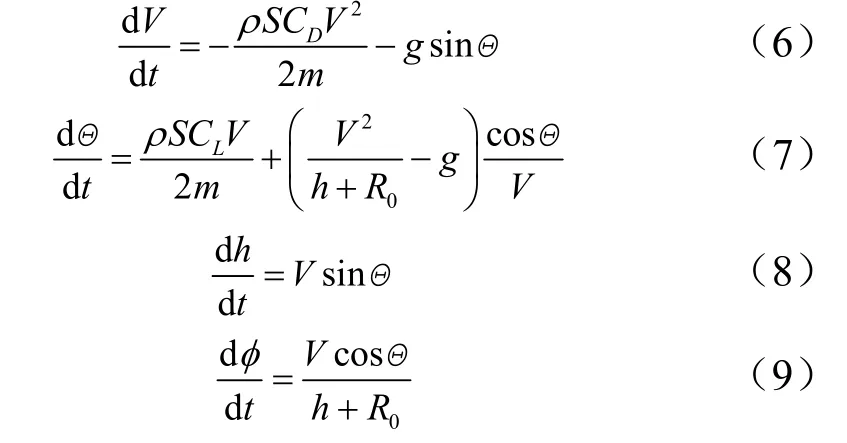
高超聲速滑翔式飛行器滑翔距離一般在 1000 km以上,而滑翔段彈道高度變化范圍基本在30 km以內,對于錢學森式彈道模式而言,當地彈道傾角及其變化率均很小,可認為0=Θ,0=˙Θ,則由式(9)除以式(6),可得射程角對速度的偏導數:


代入式(10),整理可得:

近似認為滑翔彈頭在飛行時升阻比K和滑翔高度h保持不變,設0V和0h分別為滑翔起始點的速度和高度,由0=˙Θ知0hh= ,經積分,得到平衡滑翔狀態下射程角φ的解析計算公式:

從而可以得到平衡滑翔距離公式為

以 HTV-2[7]為例進行平衡滑翔距離公式驗證,彈道仿真結果與采用式(15)進行工程計算結果的對比情況如表1所示。
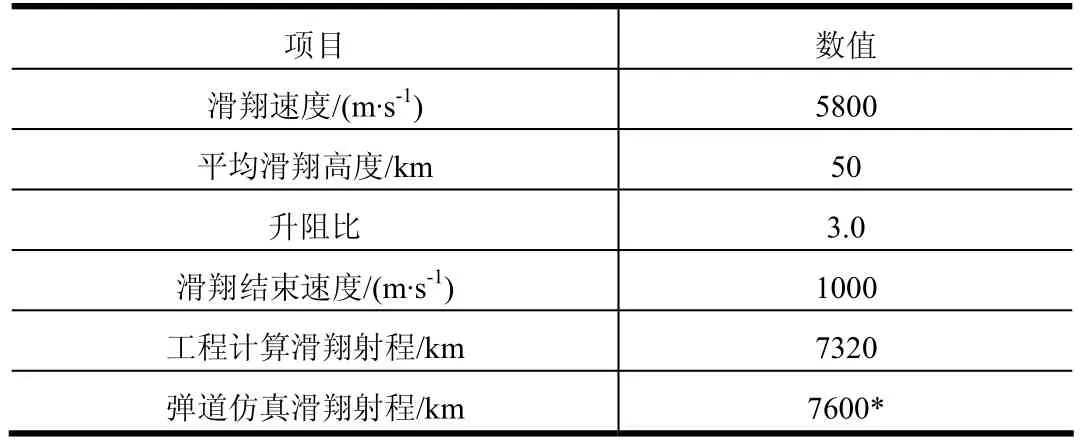
表1 平衡滑翔距離公式驗證Tab.1 Validation of Equilibrium Glide’s Range Formula
從表1可以看出,平衡滑翔距離公式具有較好的計算精度,對于射程1000 km以上導彈的滑翔距離計算誤差小于5%。
1.2 終端速度計算公式
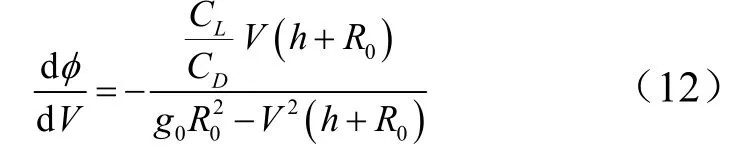
將式(15)進一步轉化,則有:

式(16)建立了滑翔終端速度與滑翔距離、滑翔高度的計算關系,已知滑翔飛行器當前高度、速度,即可計算出滑翔SL后的滑翔終端速度。
2 平衡滑翔彈道設計

由于大氣密度ρ、重力加速度g是高度h的函數,速度V是馬赫數Ma和高度h的函數,升力系數CL是馬赫數Ma和攻角的函數,則由當前馬赫數Ma和攻角即可解算出平衡機動高度指令,從而實現機動彈道設計。
平衡機動高度指令與馬赫數和攻角的變化示意如圖3所示。
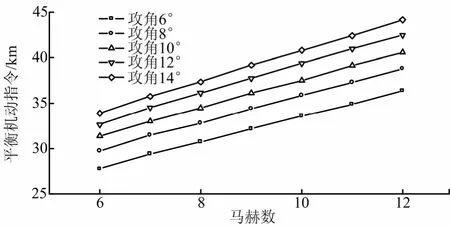
圖3 平衡機動高度指令示意Fig.3 Sketch Map of Equilibrium Glide’s Height Instruction
由圖3可知,平衡滑翔彈道每一時刻升力和重力保持平衡,但由于不同飛行攻角對應的平衡滑翔彈道高度不同,滑翔同樣射程后的速度損失也不同,利用這一特點可以開展終端速度控制與滑翔彈道聯合設計。
3 基于終端速度約束的滑翔彈道設計
3.1 設計思路
利用不同滑翔高度氣動阻力不同,滑翔距離一定情況下其滑翔終端速度也不同的特點,開展滑翔彈道和滑翔終端速度控制聯合設計。利用彈上導航裝置測量得到當前飛行速度,采用工程計算方法可以估計出一定滑翔距離后的滑翔終端速度,根據滑翔終端速度與標稱速度之間的差異,進行當前彈道飛行高度的調節,通過增加或者降低氣動阻力,實現對滑翔終端速度的調節。
3.2 設計方法
動態規劃原理表明,過程中每一個節點達到最優即可實現全程的最優。借鑒該原理,在整個滑翔過程中實時進行滑翔終端速度控制。如圖4所示,根據滑翔過程中當前速度、高度和飛行攻角,利用式(16)估算出滑翔終點速度,通過實時調節滑翔高度,實現對滑翔終端速度的控制。
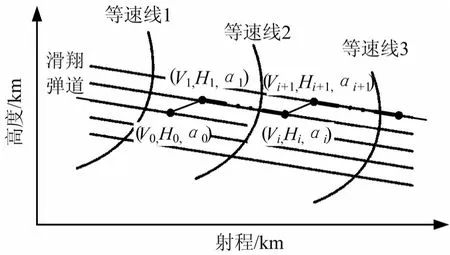
圖4 滑翔速度調節示意Fig.4 Sketch Map of Equilibrium Glide’s Velocity Adjustment
滑翔式飛行器在滑翔段根據高度指令形成過載指令進行導引飛行,其制導律為

式中cyN為過載指令;pK,dK為制導參數;h為導彈實時高度;ch為高度指令;h˙,ch˙為導彈實時高度和高度指令的時間導數。
速度調節最終需要落實到飛行高度的調節上,高度調節策略如下:
a)根據當前高度h0計算出平衡攻角αp和升阻比結合當前速度 V0和剩余滑翔射程 SL,根據式(16)計算出滑翔終端速度V,并與理想速度 VC對比,如果速度偏差滿足要求(比如ΔV≤10 m/s),則不進行速度調節,反之則需要進行速度調節。
b)當速度偏差為正時需要進行減速調節。當平衡攻角pα小于最大升阻比攻角optα時,需要壓低彈道;當平衡攻角pα大于最大升阻比攻角optα時,需要抬高彈道。給出高度變化量hΔ,使得在新的平衡高度和升阻比K1條件下的滑翔終端速度偏差ΔV滿足要求,從而得到用于減速調節的平衡滑翔高度指令
c)當速度偏差為負時需要進行增速調節。當平衡攻角pα小于最大升阻比攻角optα時,需要抬高彈道;當平衡攻角pα大于最大升阻比攻角optα時,需要壓低彈道。給出高度變化量hΔ,使得在新的平衡高度和升阻比K1條件下的滑翔終端速度偏差ΔV滿足要求,從而得到用于增速調節的平衡滑翔高度指令
4 仿真算例
以滑翔射程2700 km、滑翔終端速度1500 m/s為約束,分別針對滑翔初始高度±1 km、滑翔初始速度±100 m/s、氣動升力+20%、氣動阻力-20%等拉偏情況,取終端速度控制偏差VΔ≤10 m/s,進行滑翔彈道和滑翔終端速度控制聯合設計方法仿真驗證,仿真結果如圖5所示。
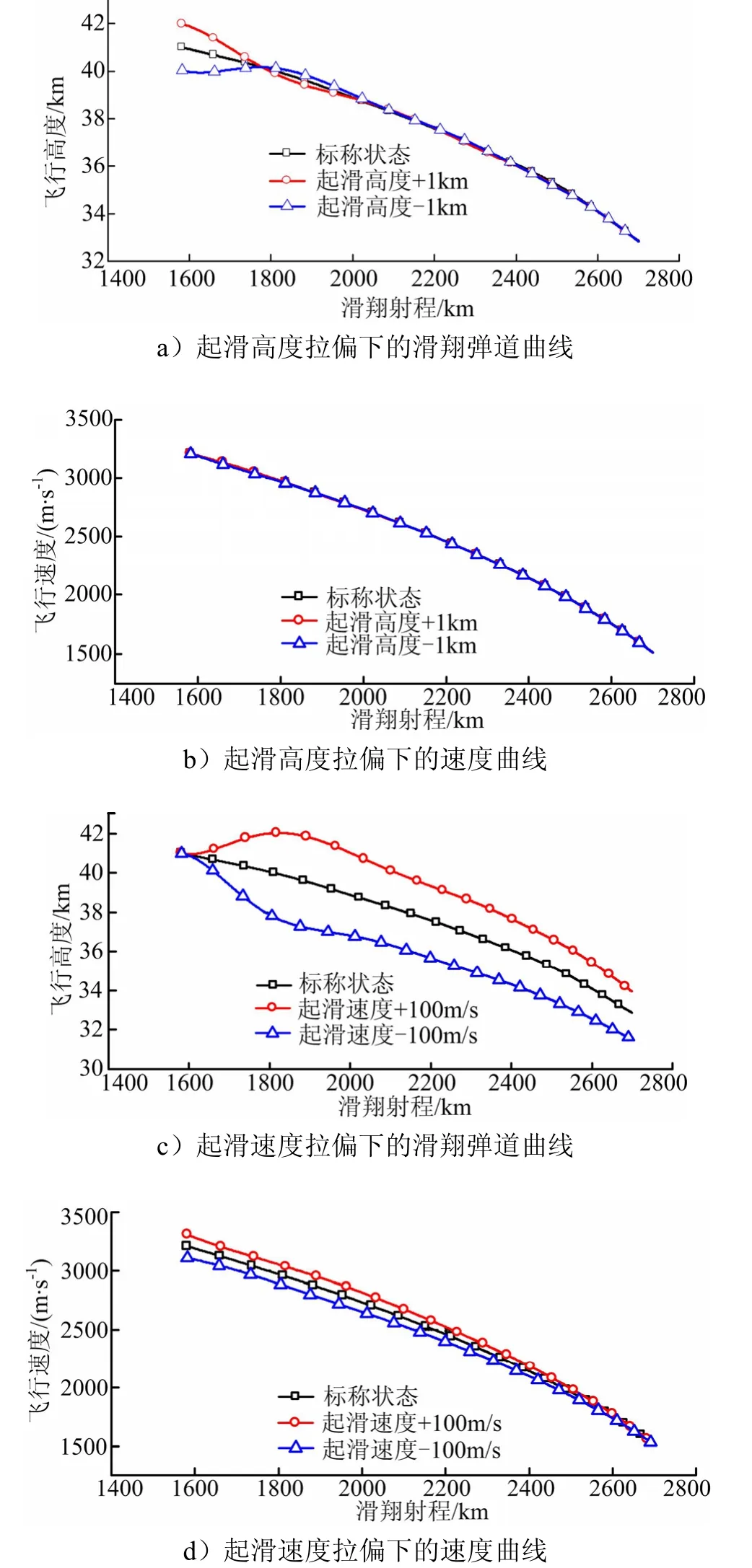
圖5 偏差情況下滑翔彈道設計及終端速度控制曲線Fig.5 Gliding Trajectory Design and Terminal Velocity Control Effect when Errors Exist
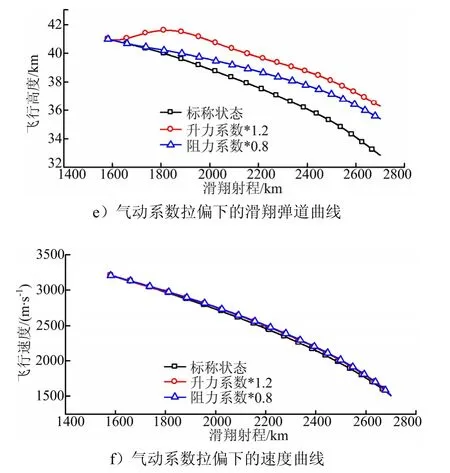
續圖5
從圖5可看出,采用本文的聯合設計方法,各種拉偏情況下終端速度控制情況良好,速度偏差在1 m/s范圍之內。對于不同初始偏差,實時規劃彈道存在不同的規律。起滑高度拉偏情況下,實時規劃彈道初期采用小幅波動實現對終端速度的控制,最終基本與標稱彈道吻合;起滑速度和氣動系數拉偏情況下,為了抵消初始速度偏差及全程氣動系數偏差帶來的額外能量影響,需要全程抬高或壓低彈道實現對終端速度的控制,拉偏彈道相比標稱彈道存在小量的偏離(不大于4 km)。
可見,本文終端速度控制與滑翔彈道聯合設計方法具有較好的應用效果,所設計的滑翔彈道平穩且具有良好的終端速度控制能力,對初始位置、速度偏差及氣動偏差等具有較好的適應性,魯棒性較強,具有較強的工程應用價值。
5 結束語
本文通過理論建模和推導,給出滑翔射程和滑翔終端速度計算公式,具有較高的計算精度。提出一種易于實現的滑翔終端速度控制方法,該控制方法采用高度指令調節策略,為實現滑翔彈道與滑翔終端速度控制聯合設計提供了基礎。仿真驗證表明該方法可行、有效,魯棒性較好,具有較強的工程應用價值。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
