基于細節增強分析的硬件木馬紅外圖像檢測方法
2018-08-20 03:42:52王和明唐永康
計算機工程與應用 2018年16期
成 釗,王和明,唐永康,張 穎
CHENG Zhao1,2,WANG Heming1,TANG Yongkang2,ZHANG Ying1
1.空軍工程大學 防空反導學院,西安 710051
2.國防科技大學 計算機學院,長沙 410073
1.Air Defense and Antimissile Institute,Air Force Engineering University,Xi’an 710051,China
2.School of Computer,National University of Defense Technology,Changsha 410073,China
1 引言
在針對集成電路的非傳統安全威脅中,硬件木馬是一種熱門的攻擊方式,它植入方式靈活,攻擊手段多樣,隱蔽性普遍較高,由此帶來了集成電路安全領域的“攻防失衡”問題,業界急需應對硬件木馬威脅的可靠防御手段。根據集成電路設計制造全球化的發展趨勢,第三方代工廠在生產階段植入的硬件木馬是目前和未來的重點防御對象[1]。
如今業內針對硬件木馬的檢測方法可分為破壞性方法和非破壞性方法。破壞性方法主要指的是反向解剖驗證,其效果較好但成本非常高昂。非破壞性方法包含功能測試和旁路分析。在功能測試領域中,Banga和Hsiao等于2009年提出利用基于測試模式生成方法激活木馬,并提高了在輸出結果中觀測到木馬的作用效果的概率[2]。Zhang等人于2015年提出基于翻轉率篩選的硬件木馬檢測方法[3],通過仿真篩選出翻轉率較低的部分,再對可疑點進行排除和對比,找出藏有木馬的部分。在旁路分析領域中,Liu等人在2013年提出了一種利用功耗信息的旁路檢測技術來檢測信息泄露型木馬[4]。2014年Soll等人提出基于電磁輻射的硬件木馬監測方法[5]。2008年Jin和Makris提出一種基于路徑延遲特征識別方法[6],即一種基于木馬電路引起的路徑延遲而形成的木馬檢測技術。2014年,Intel公司、AMD公司和Rice大學等機構聯合署名發表文章,提出了一種基于芯片工作紅外圖像的硬件木馬檢測方法[7]。國防科技大學唐永康等人于2016年提出了基于自我監控的有限狀態機的硬件木馬防御方法[8],并于2017年提出了基于紅外光譜分析的硬件木馬檢測方法[9]。國防科技大學沈高等人于2017年提出了基于二級差分的硬件木馬檢測方法[10]。
相較于其他思路,基于芯片工作時的紅外圖像對硬件木馬檢測是一種檢測力更強的方法,其主要優勢在于:第一,采集的紅外圖像信息是直觀的二維信息,可獲取芯片內部微小電路工作的信息;第二,此方法通過工作散熱區分了靜態功耗和動態功耗,有助于判別硬件木馬的植入;第三,時間成本和經濟成本都比較低廉。但目前業內還未形成標準檢測流程和統一檢測方案。
本文立足于將硬件木馬顯化的目標,設計了一種利用RO環(Ring Oscillator,環形振蕩器)充當可信任安全設計的方法并提取紅外圖像,在此基礎上提出了一種融合了時間維和空間維的細節增強方法,即首先在時間維對700張連續紅外圖像使用自適應濾波進行初步降噪處理;進而在空間維對其使用基于引導濾波的增強細節方法進行細節優化;最終選擇信噪比較高的紅外圖像作為判定依據,并利用FPGA進行了實驗驗證。
2 理論分析
2.1 硬件結構分析
2.1.1 硬件木馬結構
硬件木馬的設計存在于整個集成電路設計和制造流程中,主要借助設計過程中電路內部冗余狀態或版圖中冗余面積對目標電路進行有目的的篡改,從而實現無條件或在預設的觸發條件下篡改電路功能、泄露機密信息或癱瘓系統的目的。
從結構角度分類,硬件木馬主要包括兩類,如圖1所示:第一類是擁有觸發邏輯與功能邏輯的硬件木馬,其觸發邏輯處于長期偵聽正常工作邏輯中特定信號的工作狀態;功能邏輯在觸發信號到達前長期處于靜止狀態,一旦觸發信號到達,便立刻執行其預設的惡意功能。第二類是只擁有功能邏輯的硬件木馬,沒有觸發邏輯,功能邏輯時刻保持威脅電路和信息安全的工作狀態。
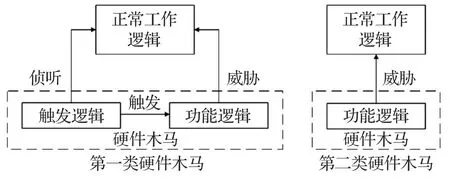
圖1 硬件木馬結構分類
不論是第一類硬件木馬還是第二類硬件木馬,都存在著芯片正常邏輯之外的額外邏輯保持工作狀態,這些額外邏輯都會侵占芯片的無邏輯區。
2.1.2 基于RO環的可信任安全設計
RO環是由非門搭建的奇數級環路,無需時鐘控制翻轉.環形振蕩器翻轉率與級數相關,最高可在90%以上,即功耗極高,發熱極大。打斷環形振蕩器,整個環路將停止工作。
考慮到硬件木馬植入是通過占領無邏輯區實現的,給出一種基于RO環的可信任安全設計。此設計利用多組RO環占領無邏輯區,并利用如圖2所示的多模工作狀態將熱模式和正常模式區分開。在熱模式中,如果硬件木馬植入則會打斷RO環,形成低溫區并導致其熱邊界的改變,通過觀測熱模式紅外圖像的低溫區和熱邊界,即可判斷是否有硬件木馬植入。

圖2 RO環熱模式與正常工作模式
參考文獻[7,10]均采用了提取芯片正常工作的紅外圖像,并與純凈母片相比對從而檢測硬件木馬有無的方案,但一般而言,純凈芯片母本是難以獲取的。與之相比,此設計法優點有:第一,無需母本;第二,在冷背景中檢測可信任安全設計是否完整,即利用多模工作狀態避開無需檢測的正常邏輯功能區,只檢測硬件木馬可能植入的區域;第三,將可信任安全設計對芯片原有正常功能的影響降到最低。
2.2 紅外圖像提取分析
2.2.1 發熱機理
一切硬件邏輯都以晶體管為基礎,其能量消耗實質上可以分為靜態能量消耗和動態能量消耗兩部分[11]。
靜態能量消耗Pstat,是元件中沒有任何翻轉活動時的能量消耗,用Ileak表示漏電流,則靜態能量消耗Pstat可如下式子計算:

由于在通常工藝下Ileak極小,靜態能量消耗極小,且硬件木馬的觸發邏輯翻轉率較高,相比于動態能量消耗而言,靜態能量消耗中發散的熱量可以忽略不計。
動態能量消耗Pdyn是邏輯電路產生翻轉時存在動態能量消耗,且占主導地位。動態能量消耗產生有兩個實際因素:
第一個因素是當元件輸出信號轉換時,會產生瞬時短路電流:

其中,時間T內短路電流所造成的平均能量消耗為Psc;Psc(t)表示邏輯元件瞬時短路能量消耗;Ipeak表示轉換活動引起的短路電流峰值;tsc表示短路電流持續時間。由于短路電路引起的動態功耗通常較小,短路功耗的散發的熱量可以忽略不計。
第二個因素是元件中負載電容充電,電源提供的能量可通過如下積分方程計算得到:
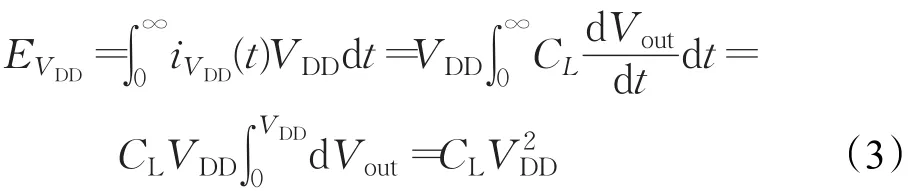
存儲在負載電容CL中的能量可通過如下積分得到:
動態能量轉換只與負載電容CL大小以及電源電壓VDD大小有關,根據能量守恒定律,由電源提供的能量、存儲在負載電容CL中的能量以及由電阻R轉化成熱能的能量滿足如下等式:

可以得到在這一過程中由源漏電阻R轉化成熱能的能量,即熱量Q的主要成分為:

RO環的翻轉率極高,其紅外信號主要來自于非門晶體管動態功耗逸散的熱量。
2.2.2 導熱機理
絕大部分的源漏電阻是由MOS管源漏擴散區的硅基電阻以及柵下導電溝道的硅基電阻組成,即由電能轉化成的紅外能絕大部分都存儲在MOS管下的硅襯底中。根據紅外學公式Q=CmΔT,變形得到其中ΔT表示硅襯底的溫度變化,單位為℃;Q表示硅襯底吸收的紅外能大小,單位為J;m表示硅襯底的質量,單位為kg;C表示硅襯底的比紅外容大小,單位為J/(kg?℃)。硅比紅外容CSi的大小為703 J/(kg?℃)。
2.2.3 紅外圖像提取過程
紅外成像實驗平臺主要由紅外熱成像儀、計算機和軟件等組成。如圖3所示,紅外熱成像儀的作用是提取芯片紅外信息并將其傳輸到計算機上,計算機和軟件的作用是處理紅外數據和顯示紅外圖像。其中,紅外熱成像儀是一個由許多微米量級像素元件組成的FPA,其分辨率的范圍是160×120~1024×1024。

圖3 紅外圖像提取實驗平臺
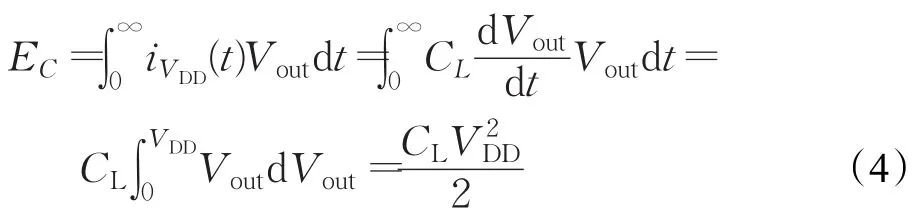
通常,檢測的芯片是BGA封裝的芯片,其結構如圖4所示。可知芯片的硅襯底面是朝向上方的,而銅互連層是朝向下方的并與電路相連。
圖4 芯片開蓋示意圖
由上文可知,芯片的絕大部分紅外能來源于晶體管的動態功耗,并由硅襯底傳導,把FPGA上蓋剖開,即可將芯片的硅片直接暴露在紅外成像儀器下,從而完成紅外圖像數據的提取。
2.3 降噪與細節增強方法分析
2.3.1 降低噪聲和增強細節的關系
面對一個不能區分有用信息和噪聲的圖像,在增強有用細節的同時,也會增強無用的噪聲;在降低無用噪聲的同時,也會減弱有用的細節。參考文獻[10]采用了樣品紅外圖像與純凈母本紅外圖像進行一次差分,再對紅外圖像剩余像素進行一次差分,最后使用卡爾曼濾波降噪的方案。此方案存在的問題是:第一,需要純凈母本;第二,對樣品和純凈母本提取圖像的過程是相互獨立的,不能保證差分的效果;第三,僅使用卡爾曼濾波降噪,未考慮對硬件木馬信號的增強。對應這些問題,本文方法不需要純凈母本,只需一次圖像提取過程,且在時間維完成降噪處理,在空間維完成增強處理,規避了一個維度上降噪和增強的矛盾。
2.3.2 自適應濾波
自適應濾波利用前一時刻已獲得的濾波器參數等結果,自動調節現時刻的濾波器參數,以適應信號和噪聲未知或隨時間變化的統計特性,從而實現最優濾波[12],如圖5所示。
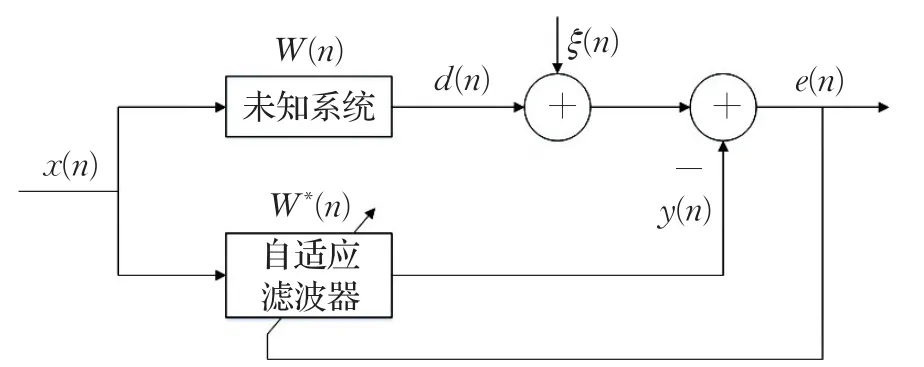
圖5 自適應濾波

式中,x(n)為n時刻參考輸入信號;W(n)為n時刻自適應濾波器權系數;W?(n)為n時刻未知系統權系數;d(n)為期望信號;e(n)為誤差信號;ξ(n)為輸入干擾信號;c(n)為跟蹤誤差信號;μ為步長因子,用來控制穩定性和收斂速度。
n階自適應濾波器權系數:


2.3.3 引導濾波
引導濾波[13]是本文所采用的細節增強方法的第一步,其模型默認復雜函數可以分解為多個局部線性函數的總和。同理,圖像是無法用解析式表示的二維函數,假設該函數輸出和輸入在一個二維窗口內滿足線性關系:

其中,q是輸出像素的值;I是輸入圖像的值;i和k是像素索引;a和b是當窗口中心位于k時該線性函數的系數;ωk是所有包含像素i的窗口;k是其中心位置。對兩邊取梯度可得:

即當輸入I有梯度,輸出q也有梯度。求出線性函數的系數,希望擬合函數的輸出值與真實值之間差距最小,即使下式最小:

參考輸入向量:
這里,p只能是待濾波圖像。同時,a之前的系數ε用于防止求得的a過大,也是調節濾波器濾波效果的重要參數。通過最小二乘法,可以得到:

其中,μk是I在窗口ωk中的平均值;是I在窗口ωk中的方差;|ω|是窗口ωk中像素的數量;是待濾波圖像p在窗口ωk中的均值。
在計算每個窗口的線性系數時,可得知一個像素會被多個窗口包含,即每個像素都由多個線性函數所描述。因此,要具體求某一點的輸出值時,只需將所有包含該點的線性函數值平均即可:

2.3.4 空間維細節增強方法
基于引導濾波的細節增強方法具體過程如圖6所示:首先,對原始圖像進行引導濾波,即保持區域邊界信息并使區域內信號平滑;第二,使用原始圖像減去引導濾波后的結果得到差值,此差值為可能包含噪聲的細節;第三,對此差值進行放大;最后,把放大后的差值加入經引導濾波的圖像達到細節增強效果。
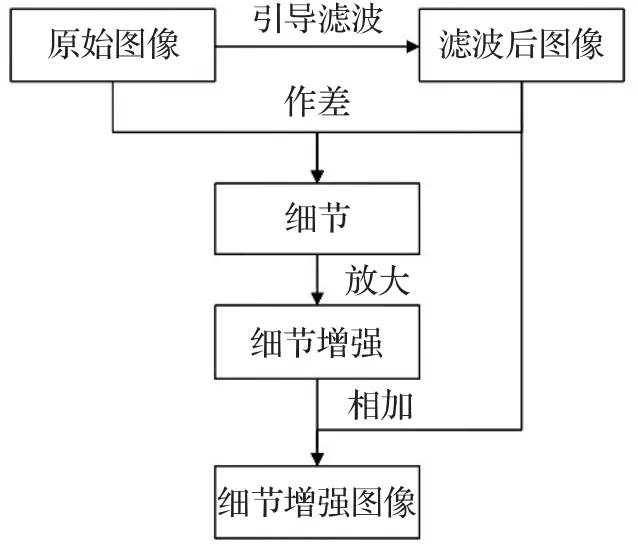
圖6 空間維細節增強方法
此方法的優勢在于引導濾波會保持圖像區域的邊界信息,因此在作差時區域邊界會保持在零值附近而不會有抖動,經放大細節后也不會有明顯的抖動。再加入經引導濾波的圖像后,細節會有較明顯的增強,并且邊界會非常清晰而不會模糊,在邊界劃分和提取方面有很大優勢。
3 實驗設計
3.1 基于RO環的可信任安全性設計
在FPGA中設計RO環模擬正常的熱工作模式,并在其中部靠右下區域留下無邏輯區,模擬由硬件木馬植入造成的RO環斷裂(下文稱為模擬單元)產生的低溫區。通過對信噪比數據的分析和對低溫區的邊界的觀察,判斷紅外圖像處理方法的效果。
3.2 時間維降噪-空間維細節增強方法
細節增強方法有可能會在增強紅外信號的同時增強噪聲,因此考慮在細節增強前先進行一次噪聲濾除。因為空間維降噪和細節增強是相互矛盾的,所以此方案采用時間維降噪。
芯片中單個像素點的溫度曲線特點是抖動上升,此抖動就是噪聲的影響結果。對溫度隨時間上升曲線的降噪只會優化曲線的平滑度而不會改變整體的趨勢和溫度上升速率,也不會改變溫度數據在空間維的真實分布情況。
此方法降噪具體過程為:首先將單次拍攝的全部700張紅外圖像按時間順序排列;第二,在所有紅外圖像中提取同一像素點的溫度數據,即可得到此像素點溫度隨時間上升曲線;第三,對每一個單像素點的溫度曲線使用自適應濾波方法,使溫度上升曲線盡可能光滑達到濾除噪聲目的;第四,將所有像素點的自適應濾波結果綜合得到700張濾波后的紅外圖像。
最后,在時間降噪的基礎上,使用基于引導濾波的細節增強方法,增強時間降噪后的紅外圖像細節,即可得到實驗結果。
4 實驗結果與分析
本實驗按時間順序提取了700張芯片工作的紅外圖像,時間間隔為8 ms。隨時間的推移芯片工作時熱擴散現象會越來越明顯,會遮蓋有用信號,因此抽取第10張紅外圖像作為實驗樣張。信噪比如下計算:計算局部方差,將其最大值作為信號方差,最小值作為噪聲方差,求出比值后轉成dB數。假設一幅M×N的灰度圖像,x(i,j)為模板中心的灰度值,那么在(2n+1)×(2m+1)的窗口內,其局部均值可以表示為:

其局部均方差可以表示為:

信噪比為:

4.1 原始圖片信息
由圖7可得,圖片中高溫區域顏色為紅色,中溫區域顏色為橙色,低溫區域顏色為黃色和藍色,圖片的對比度較差,右下角的模擬單元低溫區邊界模糊,不可識別。根據信噪比公式可得,原始圖片的信噪比為13.9683 dB。
4.2 空間維細節增強方法
由圖8可直觀看出,基于引導濾波的細節增強方法在增強有用信息時,連同噪聲也一并增強了。右下角模擬單元低溫區信號增強,但被噪聲影響不能識別。信噪比為16.5054 dB,相較原始圖片信噪比提高了2.5497 dB,細節增強效果比較明顯。

圖7 未經處理的原始紅外圖像

圖8 經空間維細節增強處理的紅外圖像
4.3 時間維降噪方法
時間維降噪方法通過對單個像素點溫度上升曲線使用自適應濾波降噪,從而完成對整幅圖片降噪。效果由平滑度指標評價:

式中,f(n)為原始信號,^f(n)為降噪后信號。降噪前方差和為0.3354,降噪后方差和為0.0266,其比值即平滑度r為0.0793。由圖9與圖10對比可知,降噪結果較好。

圖9 原始單點溫度上升曲線
由圖11可知,經時間維降噪后,由于受之后圖像的影響,信號相對加強,完成了噪聲濾除。右下角模擬單元低溫區與旁邊的高溫區對比強烈,但邊界仍不能顯化。信噪比為16.5148 dB,相較原始圖片信噪比提高了2.5371 dB,降噪效果比較明顯。

圖10 自適應濾波后單點溫度上升曲線

圖11 經時間維降噪處理的紅外圖像
4.4 時間維降噪-空間維細節增強方法
由圖12可知,經時間維降噪-空間維細節增強方法處理后,高溫區和低溫區對比度加大,右下角模擬單元低溫區明顯且出現邊界,說明經此方法處理后可以增強硬件木馬植入帶來的低溫區信號,并可以顯化其邊界。信噪比為20.1104 dB,相較原始圖片信噪比提高了6.1421 dB,降噪和細節增強效果明顯。
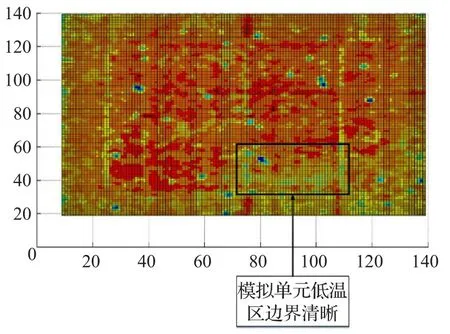
圖12 經時間維降噪-空間維細節增強處理的紅外圖像
4.5 數據分析
本文利用如圖13所示的盒圖進行700幅紅外圖像的信噪比數據整理和分析,主要包含中位數、上四分位數、下四分位數、最大觀測值和最小觀測值,并標明了大于最大觀測值的離群點。這些數據是判斷數據集的數據離散程度和偏向的依據,中位數越靠上說明信噪比越高,上下四分位數越靠近中位數說明越穩定,離群點越少說明數據越可靠。其中最大(最小)觀測值設置為與四分位數值間距離為1.5個IQR(中間四分位數極差)。

圖13 前700張紅外圖像信噪比數據統計盒圖
數據結果如表1所示,可以得出結論,相比單純降噪或單純增強方法,本文提出的先時間維降噪再空間維增強的方法可以明顯改善芯片工作紅外圖像的信噪比,所有數據都處在最佳水平。

表1 數據對比
5 結束語
本文設計了一種利用RO環充當可信任安全設計的硬件木馬檢測方法,并提出了一種面向紅外圖像的時間維降噪-空間維細節增強方法。該方法在時間維利用自適應濾波方法降低噪聲,避免了空間降噪對有用信息的干擾;在空間維利用基于引導濾波的細節增強方法優化細節,提高有用細節的對比度。實驗表明,經該方法處理后紅外圖像信噪比為20.1104 dB,相比原始圖片提高了6.1421 dB,相比單純降噪提高了3.5956 dB,相比單純細節增強提高了3.6050 dB,明顯提高了紅外圖像的信噪比,并顯化了預先設置的模擬單元邊界。但將低溫區邊界顯化只是硬件木馬檢測的第一步,在以后的研究中將逐步加入聚類劃分和識別的研究內容。
猜你喜歡
家庭影院技術(2020年10期)2020-12-14 07:53:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
小學生優秀作文(低年級)(2018年10期)2018-10-13 01:56:50
小學生優秀作文(低年級)(2018年6期)2018-05-19 01:54:35
Coco薇(2016年10期)2016-11-29 19:59:58
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:30
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
