基于GAPSO的艦艇磁性參數求解方法
2018-08-28 02:02:50白玉棟朱興樂
艦船電子對抗 2018年3期
白玉棟,朱興樂
(解放軍91404部隊,河北 秦皇島 066001)
0 引 言
海洋三分量地磁場作為重要的地球物理信息,在地磁匹配導航、艦艇磁防護等領域有著重要的應用[1]。目前海洋環境下三分量地磁場測量常采用船載式測量方法[2-4],通常將三分量磁傳感器安裝于艦艇桅桿處,以實時監測地磁場變化。由于艦艇大都由鋼鐵材料建造,在地磁場作用下會產生艦艇磁性磁場,這對地磁測量會產生較強的干擾,因此需要將艦艇磁場有效補償。由于艦艇磁場可通過磁性參數表示,這樣艦艇磁場補償問題就轉化為艦艇磁性參數的求解問題。
國內外學者針對艦艇磁性參數的求解進行了相關研究。20世紀80年代日本采用船載三分量磁測儀(STCM)進行了大規模的船載地磁測量[5],根據艦艇航向360°變化下的測量值求解出了艦艇的磁性參數,將艦艇磁場補償后其地磁測量精度達到了50±25 nT。文獻[4]對水下航行器的路徑進行了優化,采用差分進化(DE)算法獲得了較高精度的磁性參數,可將磁測量誤差降到數十納特。文獻[5]根據艦艇特定姿態下的磁測量表達式推算出了艦艇的磁性參數,但實際航行中艦艇姿態一般難以保持在穩定值。由于艦艇受風浪、涌流及重力的影響不可避免會發生晃動,通過使艦艇在搖晃狀態下繞圈行駛可以使磁測量數據在三維空間上均勻分布,從而便于磁性參數的精確求解,在此基礎上提出一種新的艦艇磁性參數解算方法。本文對艦艇搖晃狀態下繞圈行駛的磁測量值進行模擬,采用GAPSO算法可求解得出艦艇的磁性參數,同時分析了姿態角測量精度對磁性參數解算的影響并對其結果進行了仿真驗證,從而證明了該方法的正確性。
1 船載地磁測量模型
船載地磁測量中磁傳感器測量值中包含地磁場、艦艇磁場與渦流磁場。地磁場Be隨時間變化緩慢,可認為是定值,艦艇磁場分為感應磁場與固定磁場,其中艦艇感應磁場Bi與地磁場成比例變化,固定磁場Bp不隨時間變化,由于艦艇航行過程中產生的渦流磁場一般很小,故可以忽略,則地磁測量表達式Bm可簡化為:
Bm=Be+Bi+Bp
(1)
艦艇感應磁場Bi與固定磁場Bp具體可表達為:
(2)
Bp=[Bpx,Bpy,Bpz]T
(3)
式中:K為艦艇的感應磁化矩陣;kij為感應磁場i分量與地磁場j分量之間的比值,kij與Bpi均為定值,因此欲將艦艇磁場有效補償需要求解出K與Bp中12個參數。
當艦艇在航行中受風浪及重力的影響會發生搖擺晃動,導致艦艇坐標系與地磁坐標系在三維姿態空間上分別產生橫搖角γ、縱傾角θ、航向角φ,這3個角度統稱為艦艇姿態角,則地磁三分量在艦艇坐標系下的投影因此改變,從而引起艦艇感應磁場Bi發生變化:
Bi=KABe
(4)
(5)
實際航行中,艦艇姿態角可由導航設備獲得,在不考慮船體發生扭轉彎曲的情況下,認為三分量磁通門傳感器的姿態與艦艇姿態一致,則由式(1)、(2)、(4)可得實際磁測量值為:
Bm=ABe+Bi+Bp=(I+K)ABe+Bp
(6)
式中:I為單位矩陣。
由式(6)可得海洋三分量地磁場的解算表達式:
Be=A-1(I+K)-1(Bm-Bp)
(7)
在推算艦艇磁性參數前其三分量地磁場是預先測量的[3,5],將式(7)中解算的地磁場數值與預先測量值比較,即可判定艦艇磁性參數是否準確,本文就是根據這個思想求解艦艇的磁性參數。由式(7)可知姿態角及磁測量值Bm的精度直接影響艦艇磁性參數的解算,為此假定姿態角由高精度導航設備獲得,且認為三分量磁通門傳感器沒有正交、標度、零偏等固有誤差,以保證測量的精確性。
2 求解方法
艦艇的航行姿態決定著磁測量數據在空間上的分布,文獻[6]表明均勻對稱分布的測量數據有利于求解出較準確的結果。由于艦艇搖晃時其橫滾角與縱傾角不斷變化,當艦艇繞圈行駛可使其姿態在三維空間上均勻變化且磁測量值包含著更多的艦艇磁場信息,從而有利于磁性參數的精確求解,為此本文根據艦艇繞圈行駛下的測量值采用遺傳-粒子群優化(GAPSO)算法求解艦艇磁性參數。
由于PSO收斂速度快但易陷入局部最優,GA全局收斂能力較強但搜索速度慢,為此以PSO為主線,將GA中的交叉變異步驟融入到PSO中,以充分利用各自的優點,形成快速收斂到全局最優解的混合算法[7]。定義GAPSO中個體為12維的求解向量,代表著需求解的艦艇磁化參數,將其代入式(7)可得出三分量地磁場的計算值Bc,當求解參數準確時Bc應與地磁預先測量值Be一致,由此定義求解的目標函數F為:
(8)
式中:q為磁測量數據個數,當目標函數F趨于零時可得出準確的艦艇磁化參數。
GAPSO算法流程圖及主要步驟如下:
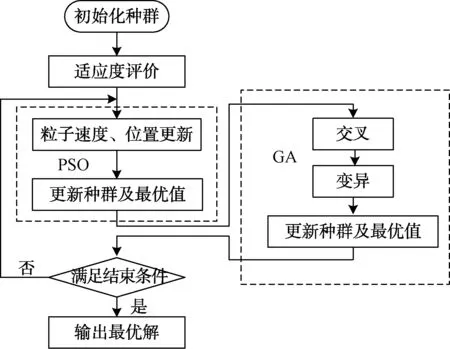
圖1 GAPSO算法結構示意圖
(1) 種群初始化。定義種群中粒子數為n,每個粒子含有12維,第i個粒子Xi=(x1,x2,…,x12),其中前9個參數代表K矩陣中元素,后3個代表Bp中元素,根據粒子的搜索范圍對種群進行初始化。
(2) 適應度評估。根據目標函數F求出各粒子的適應度值,得出粒子個體歷史最優值Pbest及群體最優值Gbest。
(3) 粒子位置速度更新。粒子根據Pbest及Gbest更新速度與位置,在第d維表達式為:
vi,d(k+1)=ω·vi,d(k)+c1·r1·(pbest-xi,d)+
c2·r2·(gbest-xi,d)
(9)
xi,d(k+1)=xi,d(k)+vi,d(k+1)
(10)
式中:k為迭代次數;c1與c2為加速因子;r1與r2為[0,1]內的隨機數;ω為慣性權重系數,取較大值時有利于全局搜索,較小值有利于局部搜索。
搜索過程中ω的變化公式為:
ω(k)=ωstart-(ωstart-ωend)·(k/T)
(11)
式中:T為最大迭代次數;ωstart與ωend分別為ω取值范圍的邊界值。
(4) 遺傳操作步驟。對種群進行交叉變異操作,按交叉概率pc從群體中選擇2個個體Xi與Xj,并在第d個元素上按下式進行交叉[8]:
xidk+1=(1-r)xidk+rxjdk
(12)
xjdk+1=rxidk+(1-r)xjdk
(13)
根據變異概率pm選擇個體并對其指定位置進行離散變異。
(5) 更新種群。將新產生的個體與父代比較,若適應度變大則更新種群,同時更新種群中個體歷史最優值Pbest及群體最優值Gbest。
(6) 結束條件。當搜索達到最大迭代次數T則輸出最優解,否則返回步驟(3)繼續搜索。
3 計算結果與分析
3.1 測量值模擬
首先根據式(6)對磁測量值進行模擬計算,設定測量海域三分量地磁場Be=[36 000,19 000,28 000](nT),磁傳感器所在位置處的艦艇感應磁化矩陣K=[0.12,0.015,0.01;0.02,0.08,0.025;0.009,0.012,0.15],固定磁性分量Bp=[500,-300,700](nT)。對艦艇的搖晃狀態進行模擬,設定其橫搖角及縱傾角成正余弦規律變化,橫搖角γ=3sin(2πt/20)°,縱傾角θ=3cos(2πt/15)°,當艦艇繞圈行駛時其航向角變化為φ=6t°,測量時每秒采集1次,共測60組數據,則由式(6)得出磁傳感器的測量值Bm1,為模擬磁通門傳感器的測量誤差對Bm1加入了幅值5 nT的高斯白噪聲。若艦艇無磁性則磁測量值Bm2=ABe,定義ΔB=Bm1-Bm2,ΔB在三分量上的分布如圖2所示。

圖2 ΔB變化曲線
由圖2可知,艦艇磁場導致的磁干擾在三分量上達到了數千納特,因艦艇在垂向上擺動較小,故ΔB在Z分量上相對較小,其磁干擾強度說明船載測磁中有必要對艦艇磁場進行補償。通過使艦艇在海面上繞圈航行,基本上使磁測量值在三維空間分布區域達到最大化,使之有利于求解出準確的艦艇磁性參數。
3.2 求解結果及驗證
采用GAPSO混合算法對磁測量值求解磁性參數,算法初始條件設定如下:
(1) 種群中粒子個數n=50,每個粒子含有12個參數,前9個參數的求解范圍為[-0.5,0.5],后3個參數求解范圍為[-1 000,1 000],最大迭代次數T=10 000。
(2) PSO算法中參數:c1=c2=1.494 45,r1與r2為[0,1]區間中隨機數,慣性權重系數ωstart=0.9,ωend=0.4,粒子速度范圍為[-0.5,0.5]。
(3) GA算法中參數:交叉概率pc=0.6,變異概率pm=0.01。
船載測磁時艦艇姿態角由導航設備獲得,但測量值并不能保證完全準確,其精確度對求解結果影響較大,因此本文對姿態角精度的影響進行了分析。令姿態角測量精度分別為0°、0.01°、0.03°、0.05°,則此4種測量條件下的求解結果如表1所示。

表1 艦艇磁性參數求解結果對比
由上述結果可知,姿態測量精度對艦艇磁性參數的解算有較大影響,當姿態角測量完全準確時,艦艇磁性參數解算值與設定值基本一致,Bp在三分量上的誤差在5 nT左右。隨著姿態角測量誤差的增大,其解算精度不斷變小,當姿態角精度為0.01°、0.03°和0.05°時,其Bp三分量解算誤差最大幅度分別達到了10 nT、25 nT、70 nT,說明姿態角測量精度越高,解算的地磁場越接近地磁真值,因此需采用高精度的導航設備獲得準確的艦艇姿態角,以將艦艇磁場有效補償。由于導航設備精度越高價格越昂貴,綜合考慮解算誤差與價格因素,選定在姿態測量精度為0.03°條件下進行船載測磁驗證。設定艦艇繞圈行駛的姿態角測量值γ=(2cos(2πt/30)+0.03r)°,θ=(2sin(2πt/25) +0.03r)°,φ=(2t+0.03r)°,r為[0,1]區間變化的隨機量,每秒采集1次磁場數據,共測量100組,則由式(7)可計算得出地磁場解算值,定義ΔBe為解算值與真實值之差,則ΔBe在三分量上的結果如圖3和表2所示。

圖3 ΔBe變化曲線

最大值最小值平均值方差ΔBex24.45-22.52-2.679.62ΔBey32.94-34.12-1.6115.17ΔBez28.77-24.074.4512.12
由表2可知,將姿態精度0.03°下求解的艦艇磁性參數直接用于船載地磁測量,可有效補償艦艇磁場的干擾,計算的地磁場與真實值間的誤差在三分量上不超過40nT,其精度基本滿足船載地磁測量的標準,說明上述艦艇磁性參數的求解結果是正確的,從而也驗證了本文對艦艇磁性參數求解方法的正確性。
4 結束語
艦艇磁場是船載地磁測量中的重要干擾源,欲將艦艇磁場有效補償需獲得準確的艦艇磁性參數。本文提出了一種獲得艦艇磁性參數的求解方法,使艦艇在搖晃狀態下繞圈行駛,可將磁測量數據在姿態空間上均勻分布,采用GAPSO混合算法得出艦艇的磁性參數。分析了姿態測量精度對解算結果的影響,指出在姿態測量誤差不超過0.03°的條件下,將船磁補償后計算得出的地磁場在三分量上誤差不超過40nT。該方法符合艦艇實際航行狀態,易于操作,對實際船載地磁測量具有重要的指導意義。
猜你喜歡
環球時報(2022-12-30)2022-12-30 15:15:00
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2016年1期)2016-01-11 16:53:24
