基于STAR-CCM+的水動力翼 對雙體船阻力影響研究*
2018-08-29 10:36:12姚國全趙應江
武漢理工大學學報(交通科學與工程版) 2018年4期
關鍵詞:模型
姚國全 劉 穎 趙應江 邱 鵬
(武漢理工大學交通學院1) 武漢 430063) (國家知識產權局專利局專利審查協作湖北中心2) 武漢 430205)
0 引 言
我國頒布的《“十二五”節能減排綜合性工作方案》對于船舶節能減排提供了指導性方向,IMO、船級社、交通運輸部對于船舶EEDI和EEOI標準指標的強制執行,為船舶節能減排提供了具體技術指標[1-3].在嚴格控制排放量的同時,也要開發更加高效、環保的高性能船舶.高速雙體船在阻力、操縱、穩性以及使用性能方面具有明顯的優勢,而近年來復合型雙體船受到了越來越多的關注,它不僅結合了多種優良船舶的優點,也為新型船舶的設計提供了更多思路,將水翼應用于雙體船便是一種創新設計,國內外對水翼雙體船的研究已經取得了一定成果,并將部分成果應用于實船,獲得了不錯的成績.
Souto等[4]通過拖曳水池模型試驗對片體間距調節來研究間距大小對雙體船阻力性能的影響.Broglia等[5]則結合數值仿真和試驗的方法進行了雙體船興波干擾影響的研究,其研究結果表明片體間距越短,干擾效應越強,通過數值仿真進行深入分析,得到壓力場和速度場更加細致的數據,數值仿真與模型試驗的誤差小與2.2%,仿真結果有很高的可信度.Kandasamy等[6]研究了一種低興波高速水翼雙體船的優化,其中對水翼的安裝位置,角度以及片體間距對遠域興波的影響進行了研究.Bruzzone等[7]通過在艏部片體之間安裝中央水動力球體研究其對雙體船耐波性的影響.國內關于雙體船阻力性能以及片體間的興波干擾也有一定的研究,李紹波等[8-9]對雙體船興波阻力數值計算和興波干擾進行了研究.李國安等[10]對近水面水翼影響的船舶興波進行了時域計算研究.汪禮[11]對近水面水翼對雙體船水動力性能進行了初步研究.陳慶任等[12-13]對近自由面三維水翼的水動力進行了數值模擬和試驗研究.
本文將采用STAR-CCM+軟件進行高速雙體船的數值模擬,通過分析數值模擬和模型試驗結果,驗證STAR-CCM+應用于雙體船水動力性能模擬的可行性,并在此基礎上嘗試探索水動力翼在雙體船減阻方面的應用,最后進行模型試驗進行驗證,得到水動力翼的安裝位置和角度對雙體船阻力的影響.
1 基于STAR-CCM+的雙體船數值仿真
1.1 控制方程及湍流模型
假定流體為不可壓縮流體,其連續性方程及動量守恒方程表達式為
連續方程:
(1)
式中:ρ為密度;t為時間;μi為速度矢量u在xi方向的分量.
動量方程(Navier-Stokes 方程):
(2)
式中:μj為速度矢量u在j方向的速度分量;p為流體微元體上的壓力;Si為質量力;μ為黏度.
此次模擬使用VOF兩相流模型,對同一連續體內的兩種流體(空氣和水)進行建模,并采用基于平均雷諾數方程(Reynolds-Averaged Navier-Stokes)求解瞬態的粘性繞流場的數值方法,計算時采用k-ε湍流模型,利用有限體積法對計算區域進行離散,使用隱式不定常進行求解,時間步長為0.02 s,每個時間步長迭代八次[14-15].
1.2 計算模型和仿真過程
本文的計算模型采用一高速雙體船模型,縮尺比為8.75,模型主尺度見表1.為建立高精度的船體三維模型,采用CATIA進行建模,建模過程中運用宏命令快速導入型線,并對球鼻艏添加了多條輔助型線,在保證曲面光滑過度的情況下,也盡量提高了模型精度,完成的三維模型圖見圖1,模型表面光順,精度較高,符合計算需求.
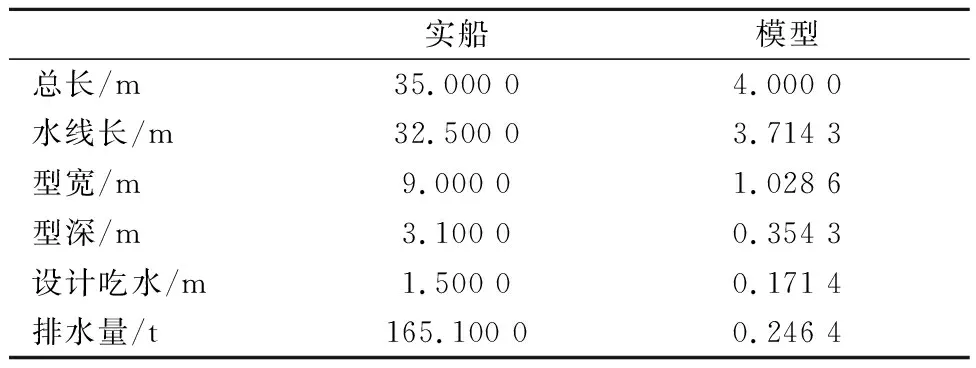
表1 高速雙體船主尺度

圖1 高速雙體船模型
計算域為36 m×18 m×27 m, 網格劃分在STAR-CCM+中進行,劃分技巧主要是對流動復雜區域如自由液面處,艏艉以及片體間區域進行適當網格加密,并保證網格間過度均勻.本次仿真采用切割體網格進行網格劃分,使用VOF兩相流進行仿真,采用6DFHI模擬模型的縱搖和升沉運動,并監測摩擦阻力,興波阻力,總阻力等多個物理量,對自由液面和船體中部興波也進行監測.邊界條件設置見圖2.

圖2 邊界條件設置
經過多次數值仿真,發現網格密度對結果存在較大影響,網格數較過大不僅會占用過多的計算資源,增加計算成本,還會使計算周期加長,而網格密度過小會使計算結果精度較差,劃分合適數量的網格對整個仿真十分重要.本文以設計航速V=2.695 7 m/s為例,對五種不同網格密度進行計算,找到最優的網格劃分方式.具體網格和計算的阻力值見表2,由表2可知,在邊界層網格為8層,網格數為3×106左右時計算結果趨于穩定.

表2 不同網格數量下的阻力性能比較
1.3 數值仿真與模型試驗結果分析
為驗證仿真結果的準確性,分別對實船速度V=6,8,10,12,14,15.5和17 kn,對應模型速度分別為V=1.044,1.391,1.739,2.087 0,2.435,2.696和2.957 m/s等七個速度進行了數值仿真,并對相應速度進行了船體模型試驗.仿真值和實驗值結果見表3.

表3 各速度點仿真值和試驗值對比
由表3可知,仿真值與試驗結果的變化規律基本一致,二者數值的峰值差距約為3.5%,同時,根據實驗現象可以看到船體周圍興波情況也相當一致,片體間的首尾興波位置也基本相同,航速尾部興波非常一致,見圖3~4.所以使用Star-CCM+對高速雙體船進行數值仿真是可行的.
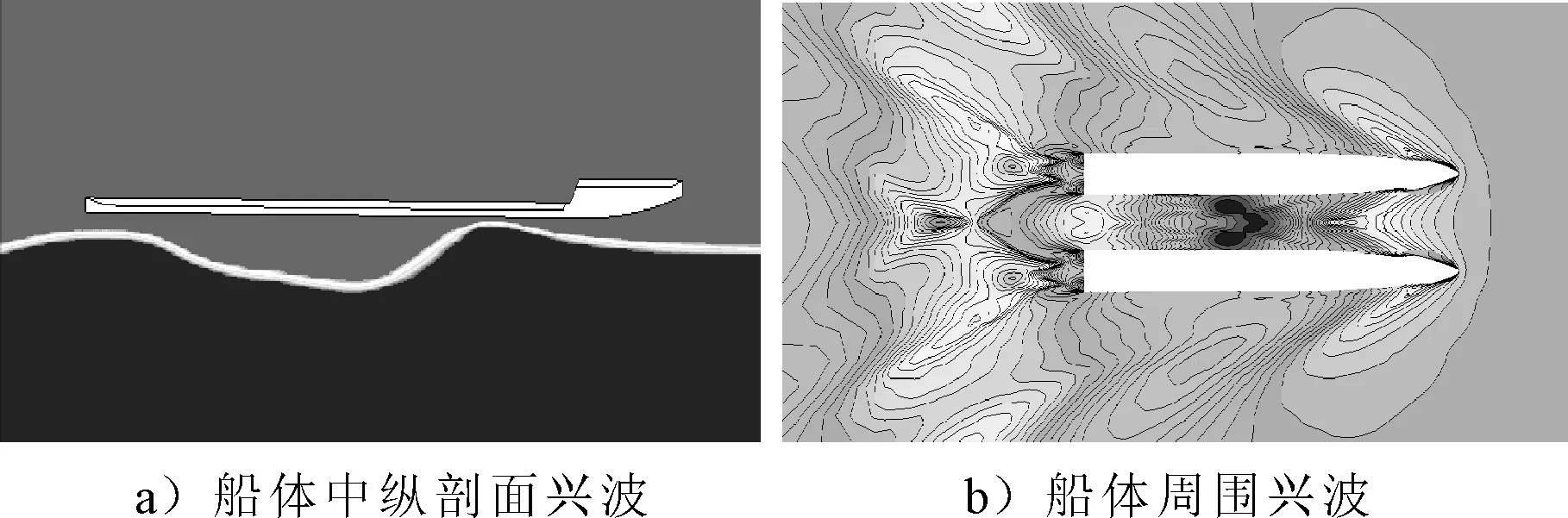
圖3 數值仿真圖

圖4 設計航速數值仿真與模型實驗船艉興波對比
2 帶翼型雙體船數值仿真
2.1 單水翼數值仿真及結果分析
通過分析未裝水翼的雙體船進行模型試驗和數值仿真結果,可以看出,在設計航速,數值仿真中片體間興波位置與船模試驗非常接近,艏艉興波位置分別位于FR09和FR50處稍后.為使水翼得到較大升力,本文將水翼安裝在波浪上升段,水翼位置安裝于FR09與FR50處,水翼高度距基線100 mm.考慮到加工方便,本文采用對稱型NACA0015,翼型寬度均為100 mm,翼型長度為200 mm.首先分別進行艏艉單翼型的數值仿真,再進行雙翼型的仿真,水翼攻角分別為0°,2.5°,5°,7.5°和10°,數值仿真結果見圖5.
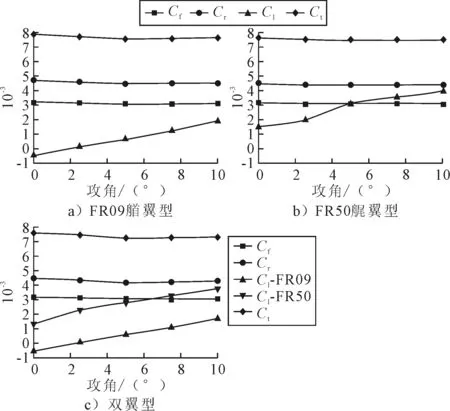
Cf-摩擦阻力系數;Cr -剩余阻力系數; Cl-升力系數;Ct-總阻力系數圖5 設計航速不同攻角升阻力系數對比圖
2.2 數值仿真結果分析
通過對數值仿真結果分析可見,仿真結果比較符合預期,有一定的規律性可尋:①翼型攻角變化對摩擦阻力影響較小;②三種翼型安裝方式都在攻角5°左右時,剩余阻力較小,總阻力也較小,呈現最佳的阻力性能;③和未裝翼型的數值仿真結果進行對比,設計航速首翼型最大減阻率為3.148%,尾翼型最大減阻率為4.612%,雙翼型最大減阻率為6.657%,尾翼型較艏翼型減阻效果好,雙翼型的減阻效果最佳;④翼型升力隨攻角的增加而增大,同角度下尾翼型升力比艏翼型大.
3 雙體船水動力翼模型試驗
3.1 模型試驗方案及試驗結果
由于本次數值模擬只進行了設計航速處的仿真,為了探究水翼對高速雙體船阻力在更多速度段的影響,同時也為了驗證數值仿真的準確性,進行五組試驗,選擇0°,2.5°,5°,7.5°和10°五種攻角,在FR09和FR50處分別進行單翼型阻力試驗,最后進行雙翼型試驗,試驗速度點為V=1.043,1.391,1.739,2.087,2.435,2.696和2.957 m/s,試驗結果見圖6.

圖6 不同攻角與無翼型阻力系數對比圖
3.2 試驗與數值仿真結果分析
根據模型試驗結果可以看出,各工況下高速雙體船總阻力在不同速度上呈現不同的變化,總要歸納為以下幾點:①艏翼型狀態下,低速段阻力增加較為明顯,高速段翼型攻角為5°時有減阻效果,在V=2.957 m/s最大減阻率為0.939%,經實驗過程觀察發現,該種水翼安裝方法對導致船體縱傾角過大,從而導致阻力的增加,沒有達到數值仿真的減阻效果;②艉翼型狀態下,低速度段阻力增加較為明顯,在設計航速及以上航速狀態下,模型總阻力出現下降的情況;在V=2.957 m/s時最大減阻率為2.141%;③對于首尾均安裝水動力翼的情況,在低速段阻力有增大趨勢,在高速段有減小趨勢,在雙水翼攻角均為5°時有較好阻力性能,速度V=2.957 m/s時最大減阻率為1.587%.
4 結 論
1) 通過對高速雙體船三維建模,找到了一種快速高精度建立船體模型的方法,通過對型線圖進行必要處理,并靈活使用CATIA中的宏命令,對復雜曲面添加輔助線對方式可以快速建立船體的3維模型.
2) 通過使用STAR-CCM+對高速雙體船進行數值仿真,得到了比較理想的仿真結果,在設計航速狀態時,誤差為2.285%,在多個速度的仿真,最大誤差僅為3.5%,同時該軟件計算速度較快,相比于Fluent軟件能夠節約較多計算時間.
3) 通過對安裝水動力翼的高速雙體船進行數值仿真,初步了解了安裝水動力翼對高速雙體船的阻力性能和流場變化影響,發現翼型角度為5°時模型有較好的阻力性能,為模型試驗起到了指導作用.
4) 通過進行高速雙體船的無水翼模型阻力試驗和安裝水翼的多種工況下模型試驗,得到了安裝水動力翼后模型的阻力性能變化,發現在低速度段水翼的安裝會增加船舶的形狀阻力,從而引起總阻力增加,在高速段剩余阻力減小明顯,從而使船舶總阻力減小,艉翼型安裝方式下阻力減小較為明顯,為最佳翼型安裝方式.
5) 通過對比數值仿真和模型試驗結果發現,阻力性能變化基本一致,艉翼型數值仿真與模型試驗結果比較接近,艏翼型誤差較大,雙翼型結果誤差在這兩種情況之間,后續還需要進一步研究.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
