基于區(qū)域CORS的多系統(tǒng)組合PPP定位研究
2018-08-30 00:43:56李江衛(wèi)孫偉范清彪白潔
城市勘測 2018年4期
關(guān)鍵詞:系統(tǒng)
李江衛(wèi),孫偉,范清彪,白潔
(武漢市測繪研究院,湖北 武漢 430022)
1 引 言
通常CORS系統(tǒng)提供的定位服務(wù)局限于系統(tǒng)基準(zhǔn)站點間基線所形成的封閉區(qū)域之內(nèi),對于用戶跨網(wǎng)元連續(xù)作業(yè)以及超出覆蓋區(qū)域的定位精度則難以保障。而基于區(qū)域CORS系統(tǒng)多星座觀測條件下,采用增強(qiáng)的實時精密單點定位技術(shù)(PPP),由于可用觀測信息更多,衛(wèi)星幾何圖形更強(qiáng),能夠較大地改善定位精度和收斂速度[1,2,3],并能在一定程度上提高定位精度和可靠性[1,3,4]。
傳統(tǒng)非差PPP模型通常使用無電離層組合的偽距和相位觀測值進(jìn)行參數(shù)估計[4,5],其中偽距觀測值的主要作用在于分離接收機(jī)鐘差與載波相位模糊度參數(shù)[6,8,10]。在多系統(tǒng)PPP數(shù)據(jù)處理中,為平衡不同系統(tǒng)、不同類型的觀測值對參數(shù)估計的貢獻(xiàn),需要對觀測值進(jìn)行合理定權(quán)[7]。如何克服不準(zhǔn)確的偽距隨機(jī)模型帶來的不利影響是多系統(tǒng)組合PPP數(shù)據(jù)處理的關(guān)鍵[9]。本文采用區(qū)域CORS系統(tǒng)所生成的增強(qiáng)信息,基于星間單差模型進(jìn)行PPP試驗研究。該模型消除了接收機(jī)鐘差參數(shù),無須使用偽距觀測值分離接收機(jī)鐘差與模糊度參數(shù),也就無須考慮對偽距觀測值建立準(zhǔn)確隨機(jī)模型,從而提高了基于區(qū)域CORS的PPP可用性。
2 精密單點定位參數(shù)估計
精密單點定位參數(shù)估計方法主要有最小二乘法和卡爾曼濾波估計[9]。卡爾曼濾波估計采用遞推算法,根據(jù)參數(shù)的驗前估值和新的觀測數(shù)據(jù)進(jìn)行狀態(tài)參數(shù)的更新,一般只需存儲驗前一個歷元的狀態(tài)參數(shù)估值,即可遞推得到當(dāng)前歷元的狀態(tài)參數(shù)估值,具有較高的計算效率,也易于程序?qū)崿F(xiàn)。卡爾曼濾波估計的狀態(tài)方程和觀測方程可表示為[9]:
(1)
式中,Xk是t(k)時刻的狀態(tài)向量;Φk,k-1為從t(k-1)時刻至t(k)時刻系統(tǒng)狀態(tài)的一步轉(zhuǎn)移矩陣;Γk-1為系統(tǒng)噪聲驅(qū)動陣;Wk-1為系統(tǒng)激勵噪聲;Lk為t(k)時刻觀測向量,Hk為觀測方程的系數(shù)陣,Vk為觀測噪聲。
精密單點定位通常采用雙頻無電離層組合模型消除電離層延遲,衛(wèi)星軌道誤差、衛(wèi)星鐘差則采用精密星歷與精密衛(wèi)星鐘差來消除或削弱其影響。其余誤差如天線相位中心偏差、相對論效應(yīng)、固體潮、海洋潮等誤差采用現(xiàn)有模型對其進(jìn)行精確改正。因此,精密單點定位狀態(tài)向量X,通常包括接收機(jī)位置、速度、接收機(jī)鐘差、天頂對流層濕延遲以及所有GNSS衛(wèi)星的模糊度[5]等待估參數(shù):

(2)

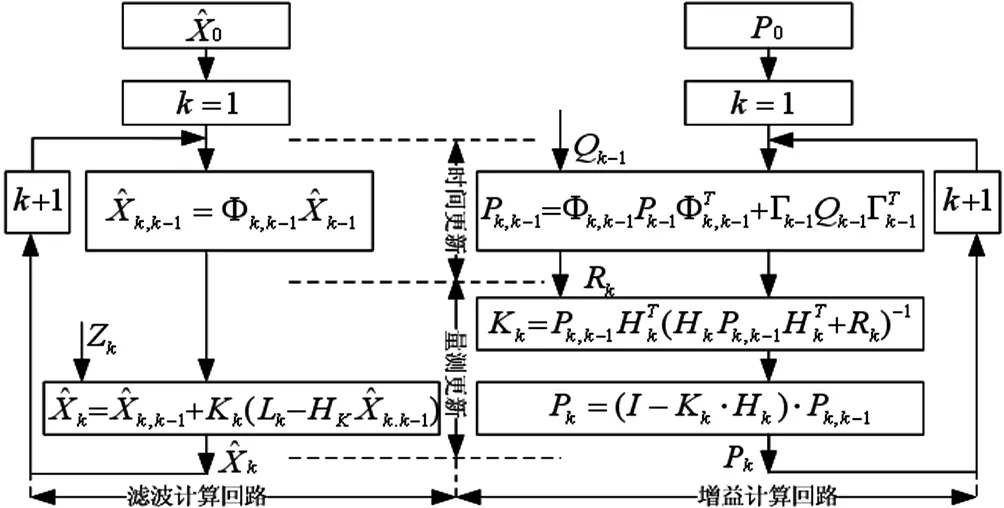
圖1 卡爾曼濾波的兩個計算回路和兩個更新過程
3 多系統(tǒng)觀測數(shù)據(jù)融合的星間單差PPP模型
在非差PPP模型中偽距觀測值的主要貢獻(xiàn)是用于分離接收機(jī)鐘差與模糊度參數(shù)。本文對非差無電離層組合載波相位觀測值進(jìn)行星間作差,消除了GNSS接收機(jī)鐘差參數(shù)。在該模型中,單系統(tǒng)PPP無須估計接收機(jī)鐘差,而在多系統(tǒng)PPP模型中,對GLONASS觀測值只需估計GPS-GLONASS系統(tǒng)時間差,對BDS觀測值只需估計GPS-BDS系統(tǒng)時間差。因此,不必利用偽距觀測值分離接收機(jī)鐘差與模糊度參數(shù),也就無須對偽距觀測值嚴(yán)格建模,從而削弱了偽距隨機(jī)模型對最終定位結(jié)果的影響。
單系統(tǒng)PPP以高度角最高的健康衛(wèi)星作為參考星,而在多系統(tǒng)PPP數(shù)據(jù)處理中,則以高度角較高且狀態(tài)良好的GPS衛(wèi)星作為參考星。假設(shè)接收機(jī)r同時觀測到m顆衛(wèi)星,則所有衛(wèi)星的無電離層組合載波相位觀測值可組成如下線性方程組[4,5]:

(3)
對上式利用非差-單差轉(zhuǎn)換矩陣可以得到單差方程:

(4)
本文通過對無電離層組合星間單差載波相位觀測值進(jìn)行Kalman濾波處理,實現(xiàn)了GPS/GLONASS/BDS單系統(tǒng)/組合PPP定位。濾波狀態(tài)包括位置參數(shù)、系統(tǒng)時間差、天頂對流層濕延遲和非差浮點模糊度參數(shù)。單差狀態(tài)參量通過非差狀態(tài)參量采用單-非差轉(zhuǎn)換矩陣而得到[3]:
(5)

(6)
(7)

4 GPS、BDS單系統(tǒng)精密單點定位算法
(1)具體參數(shù)估計及誤差處理策略
實驗具體的參數(shù)估計和誤差策略如表1所示。值得注意的是,目前IGS只提供了粗略的BDS衛(wèi)星端PCO改正,尚無機(jī)構(gòu)或組織提供BDS衛(wèi)星端PCV以及接收機(jī)端的PCO與PCV信息,因此無法精確地改正天線相位中心偏差及其變化。

估計參數(shù)及其估計策略 表1
(2)實驗驗證
選取WHCORS系統(tǒng)10個測站2016年DOY264~270共7天的BDS/GPS雙系統(tǒng)GNSS觀測數(shù)據(jù),進(jìn)行靜態(tài)和動態(tài)PPP實驗。測站信息如表2所示。實驗將每個測站 24 h觀測數(shù)據(jù)切割為8個子時段,按每子時段為 3 h,一共有448個子時段。

測站相關(guān)信息 表2
為評價GPS和BDS單系統(tǒng)PPP的定位性能,實驗先采用靜態(tài)PPP技術(shù)對武漢市CORS系統(tǒng)進(jìn)行解算,從觀測數(shù)據(jù)中分離區(qū)域增強(qiáng)信息,其中包括衛(wèi)星鐘差、對流層延遲誤差和衛(wèi)星UPD[2],具體過程如下:
①基于IGU軌道產(chǎn)品和區(qū)域CORS數(shù)據(jù)對衛(wèi)星鐘差進(jìn)行實時估計。采用星間差分偽距觀測值,實時估計低采樣率的衛(wèi)星鐘差;通過星間-歷元間雙差觀測值,實時估計衛(wèi)星鐘差的歷元間變化,并累加至低采樣率衛(wèi)星鐘差,實現(xiàn)高采樣率衛(wèi)星鐘差的實時估計。
②區(qū)域CORS實時反演基準(zhǔn)站天頂對流層濕延遲。
③基于區(qū)域CORS觀測值,采用“寬巷-無電離層-窄巷”的三步法[11,12]分離穩(wěn)定的衛(wèi)星UPD。
④采用以上基于區(qū)域CORS的增強(qiáng)信息,實現(xiàn)各基準(zhǔn)站各子時段寬巷、窄巷的模糊度實時固定,進(jìn)而得到無電離層模糊度并實現(xiàn)PPP固定解。
⑤將各子時段PPP解算結(jié)果與參考真值做差,獲得E、N、U三個方向上的坐標(biāo)偏差以分析BDS和GPS單系統(tǒng)PPP的收斂時間和定位精度。

圖2 BDS(左)、GPS(右)靜態(tài)PPP收斂時間分布
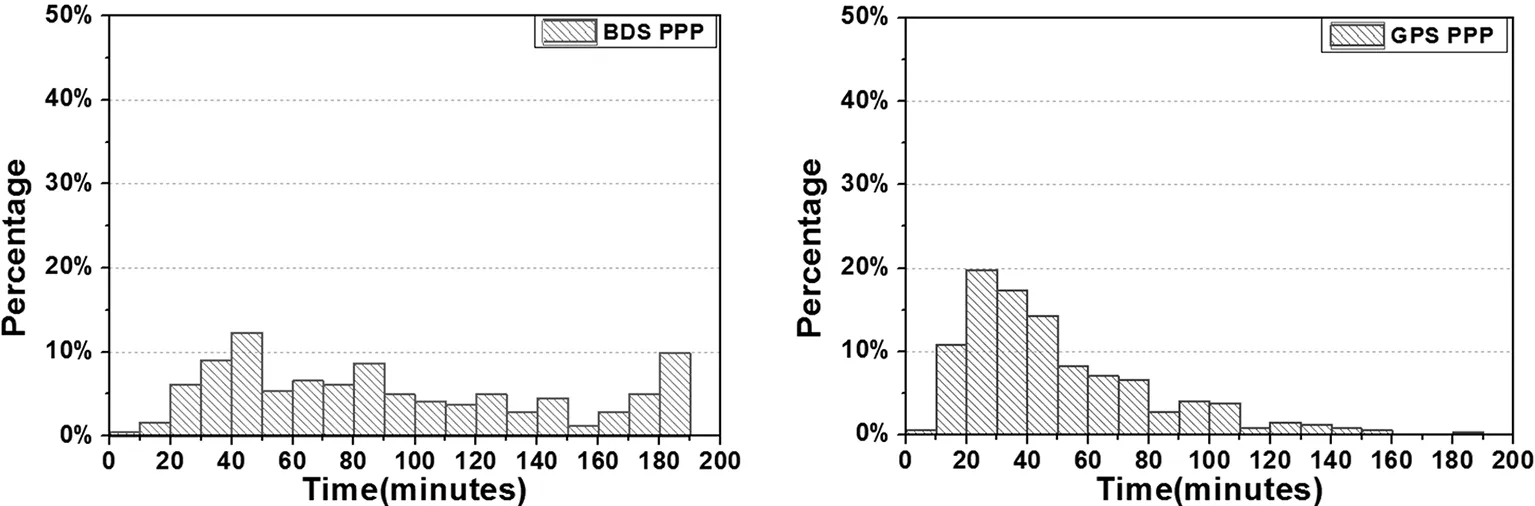
圖3 BDS(左)、GPS(右)動態(tài)PPP收斂時間分布
圖2、圖3分別給出了7天所有數(shù)據(jù)靜態(tài)、動態(tài)PPP的收斂時間分布統(tǒng)計。所有數(shù)據(jù)的收斂時間統(tǒng)計如下:BDS靜態(tài)PPP的平均收斂時間為 77.4 min,動態(tài)PPP為 98.3 min;GPS靜態(tài)、動態(tài)PPP的平均收斂時間分別為 27.6 min和 49.6 min。不管是靜態(tài)PPP還是動態(tài)PPP,BDS的收斂時間均比GPS長約 50 min左右。
眾所周知,PPP的解受衛(wèi)星軌道和鐘差產(chǎn)品精度、星座幾何強(qiáng)度的影響較為明顯。目前BDS的精密衛(wèi)星產(chǎn)品精度較GPS差,且無法精確改正PCO和PCV誤差。而且,測試時BDS的可用衛(wèi)星數(shù)只有14顆,而GPS有31顆,其幾何強(qiáng)度遠(yuǎn)比BDS要好。因此,BDS PPP的收斂時間明顯長于GPS PPP。

BDS PPP和GPS PPP三小時解的東北高分量上的平均RMS 表3
對所有分時段數(shù)據(jù)計算平均定位RMS偏差,如表3所示。可以看出,對于 3 h的觀測數(shù)據(jù),BDS靜態(tài)PPP定位精度優(yōu)于 5 cm;動態(tài)PPP水平方向定位精度優(yōu)于 8 cm,高程方向約 12 cm。GPS靜態(tài)PPP定位精度優(yōu)于 2 cm,動態(tài)PPP水平方向優(yōu)于 3 cm,高程方向約 4 cm。BDS PPP收斂后的定位結(jié)果要差于GPS,靜態(tài)相差約 2 cm左右,動態(tài)相差約 4 cm~8 cm。這主要是由于當(dāng)前BDS的MEO衛(wèi)星數(shù)較少,衛(wèi)星分布及幾何圖形比GPS差一些,且軌道和鐘差產(chǎn)品精度相對較低等因素造成的。
以上3 h時段GPS和BDS單系統(tǒng)PPP實驗的結(jié)果表明,GPS PPP動態(tài)定位精度在水平方向優(yōu)于 3 cm,高程方向約為 4 cm,符合要求,BDS PPP動態(tài)定位精度水平方向約為 6 cm~8 cm,高程方向超過 1 dm。這主要是由于當(dāng)前BDS的MEO衛(wèi)星數(shù)較少,衛(wèi)星分布及幾何圖形比GPS差,且軌道和鐘差產(chǎn)品精度相對較低等因素造成的。
5 GPS/BDS,GPS/GLONASS雙系統(tǒng)PPP算法
單系統(tǒng)PPP為獲得較高的定位精度通常需要較長的收斂時間,其定位精度及可靠性受外界觀測環(huán)境的影響較大。而基于星間單差的PPP模型,能融合處理多系統(tǒng)GNSS觀測數(shù)據(jù),實驗驗證如下。
同樣利用10個基準(zhǔn)站2016年9月21日~27日(年積日264-270)觀測數(shù)據(jù)進(jìn)行3h PPP解算,將解算結(jié)果分別與參考真值進(jìn)行比較,以評估雙系統(tǒng)PPP的精度和可靠性。

圖4 各站7天雙系統(tǒng)靜態(tài)PPP平均收斂時間

圖5 各站7天雙系統(tǒng)動態(tài)PPP平均收斂時間
各測站雙系統(tǒng)靜態(tài)PPP解7天的平均收斂時間如圖4所示。對大多數(shù)測站,GPS+GLO PPP靜態(tài)解平均收斂時間約為 15 min~20 min;GPS+BDS PPP平均收斂時間約為 20 min~25 min。大多數(shù)情況下,GPS+GLO靜態(tài)PPP收斂時間要短于GPS+BDS靜態(tài)PPP。各測站雙系統(tǒng)動態(tài)PPP解7天的平均收斂時間如圖5所示。對大多數(shù)測站,GPS+GLO PPP靜態(tài)解平均收斂時間在 25 min左右;GPS+BDS平均收斂時間約為 30 min~40 min。所有測站GPS+GLO動態(tài)PPP收斂時間要短于GPS+BDS動態(tài)PPP。

GPS/BDS PPP和GPS/GLONASS PPP三小時解的東北高分量上的平均RMS 表4
對各測站7天的雙系統(tǒng)PPP定位偏差取平均值,其結(jié)果如表4所示。GPS/BDS組合PPP和GPS/GLONASS組合PPP靜態(tài)解都可以取得水平和高程方向優(yōu)于 2 cm的定位精度。基于雙系統(tǒng)組合的動態(tài)PPP解均能取得水平方向 1 cm~2 cm,高程方向 3 cm~4 cm的定位精度,且GPS+GLO組合PPP定位精度要略優(yōu)于GPS+BDS組合PPP。
以上雙系統(tǒng)PPP的定位結(jié)果表明,無論是GPS/BDS組合PPP,還是GPS/GLONASS組合PPP都能取得水平方向優(yōu)于 3 cm,高程方向優(yōu)于 5 cm的定位精度,且GPS/GLONASS組合PPP的定位精度更優(yōu)。
6 結(jié) 語
為了合理融合多系統(tǒng)GNSS觀測數(shù)據(jù),本文基于區(qū)域CORS系統(tǒng)的增強(qiáng)信息,采用能靈活處理單/多系統(tǒng)GNSS觀測數(shù)據(jù)的星間單差PPP模型,克服了多系統(tǒng)偽距觀測值難以合理定權(quán)的問題。利用該模型實現(xiàn)了BDS單系統(tǒng)和GNSS多系統(tǒng)PPP算法。對單/多系統(tǒng)PPP的定位性能進(jìn)行了細(xì)致地分析。數(shù)據(jù)處理結(jié)果表明:
(1)利用3 h時長的GNSS觀測數(shù)據(jù),BDS單系統(tǒng)動態(tài)PPP絕對定位精度(RMS)水平方向約為 6 cm~8 cm,高程方向超過1dm;
(2)GPS單系統(tǒng)動態(tài)PPP定位精度水平方向約為 3 cm,高程方向約為 4 cm;GPS/BDS組合動態(tài)PPP定位精度水平方向 2 cm左右,高程方向 3 cm~4 cm,可以滿足常規(guī)動態(tài)應(yīng)用的需要。
相比傳統(tǒng)PPP,通過使用區(qū)域CORS系統(tǒng)的增強(qiáng)信息,采用多系統(tǒng)觀測數(shù)據(jù)融合的星間單差PPP模型,實現(xiàn)了PPP快速解算,使定位結(jié)果收斂到優(yōu)于 8 cm的時間縮短了約35%,為PPP的工程應(yīng)用和拓展區(qū)域CORS服務(wù)范圍提供了一種可行的解決方案。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32