基于充電法判定基樁鋼筋籠長(zhǎng)度的理論與應(yīng)用技術(shù)試驗(yàn)研究
2018-08-31 11:16:10榮黎李俊余敏安徽省建設(shè)工程測(cè)試研究院有限責(zé)任公司安徽合肥230000
安徽建筑 2018年4期
榮黎 ,李俊 ,余敏 (安徽省建設(shè)工程測(cè)試研究院有限責(zé)任公司,安徽 合肥 230000)
地下隱蔽工程質(zhì)量檢測(cè)工作中,基樁鋼筋籠長(zhǎng)度的判定是其重要的工作之一。基樁鋼筋籠長(zhǎng)度的判定工作通常采用井中物探(井中磁法、電法或電磁法)方法。然而,井中物探需在樁中鉆孔或在樁邊成一PVC套管的鉆孔,應(yīng)用鋼筋籠的天然鐵磁性特征的井中磁法和井中測(cè)量的充電法,判測(cè)井需在目標(biāo)基樁中間或0.5m以內(nèi),一般一判測(cè)井只能判測(cè)一基樁,費(fèi)工費(fèi)時(shí)。為了能使基樁鋼筋籠長(zhǎng)度的判定工作做到快速,經(jīng)濟(jì),高效,我們從方法的基本理論著手,經(jīng)過(guò)反復(fù)比對(duì)試驗(yàn),首先以井中磁法為參照點(diǎn),采用類似于錨桿無(wú)損檢測(cè)的應(yīng)力波檢測(cè)方法進(jìn)行比對(duì),由于基樁配筋率遠(yuǎn)低于錨桿,鋼筋籠底部波阻抗相對(duì)樁砼來(lái)說(shuō)變化非常小,而鋼筋本身波速高且衰減快,相對(duì)于較短的基樁,采用應(yīng)力波檢測(cè)方法效果較差。進(jìn)而我們又進(jìn)行了判測(cè)井在目標(biāo)基樁0.5m以內(nèi)井中磁法和充電法進(jìn)行比對(duì),結(jié)果完全吻合。為了提高效率,我們又進(jìn)行了一判測(cè)井判測(cè)多根樁(充電樁籠)的充電法試驗(yàn),試驗(yàn)結(jié)果較復(fù)雜但具有一定的規(guī)律性,判測(cè)規(guī)律主要取決于判測(cè)井與判測(cè)樁的距離、位置及周邊樁籠的位置和距離,經(jīng)過(guò)從理論到實(shí)驗(yàn)的反復(fù)比對(duì)試驗(yàn),取得了較滿意的試驗(yàn)成果。為了擺脫耗工費(fèi)時(shí)的鉆井檢測(cè)方式,更好的提高基樁鋼筋籠長(zhǎng)度的判測(cè)工作效率,我們又開(kāi)發(fā)了基于充電法判定基樁鋼筋籠長(zhǎng)度的靜探測(cè)試系統(tǒng),該系統(tǒng)現(xiàn)已獲得國(guó)家頒布的實(shí)用新型發(fā)明專利。
1 充電鋼筋籠的電場(chǎng)
充電的鋼筋籠非常細(xì)長(zhǎng),可看做線型接地長(zhǎng)電極,由電極流入地下的電流強(qiáng)度為I,電極長(zhǎng)度為2l;P點(diǎn)至電極垂直距為b;至電極兩端的距離為r1和r2;與電極兩端的連線和電極間的夾角分別為θ1、θ2(圖1),P點(diǎn)的場(chǎng)勢(shì)為
a=(r1+r2)/2(等勢(shì)橢球面的半長(zhǎng)軸)
在yz平面上半焦距為l,半長(zhǎng)軸為a=(r1+r2)/2,半短軸為的橢圓繞z軸旋轉(zhuǎn)一周所形成的橢球面族即為其等勢(shì)旋轉(zhuǎn)橢球面。
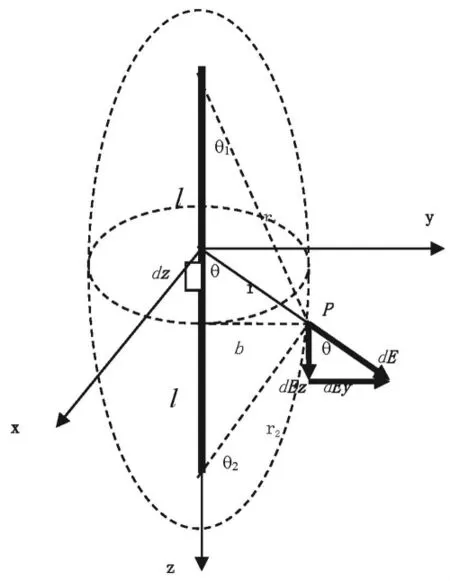
圖1 有限線源模型示意圖
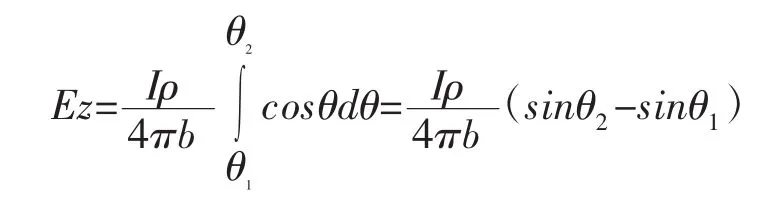
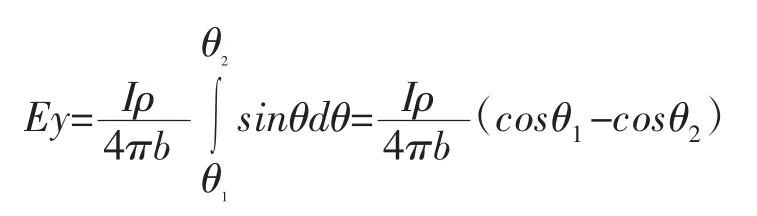
因?yàn)樵搱?chǎng)勢(shì)為旋轉(zhuǎn)對(duì)稱的橢球場(chǎng),水平方向全對(duì)稱,忽略x方向,取yoz坐標(biāo)平面進(jìn)行運(yùn)算:
2 充電樁籠周邊樁籠(穩(wěn)定電流場(chǎng)中的導(dǎo)體)感應(yīng)電場(chǎng)
充電法采用穩(wěn)定電流場(chǎng),而充電樁籠周邊的其它樁籠就是穩(wěn)定電流場(chǎng)中的導(dǎo)體。穩(wěn)定電流場(chǎng)和靜電場(chǎng)一樣都是勢(shì)場(chǎng)。由于電流場(chǎng)問(wèn)題可以利用靜電問(wèn)題來(lái)?yè)Q算(用靜電類比法),可以從研究靜電場(chǎng)問(wèn)題的解法入手。
金屬導(dǎo)體處于靜電場(chǎng)中,金屬的自由電子在外電場(chǎng)的作用下相對(duì)于晶格作定向運(yùn)動(dòng),并在導(dǎo)體的一個(gè)側(cè)面集結(jié),使該側(cè)面出現(xiàn)負(fù)電荷。而相對(duì)的另一側(cè)面則出現(xiàn)正電荷,這就是靜電感應(yīng)現(xiàn)象。由此產(chǎn)生的電荷稱為感應(yīng)電荷。相對(duì)側(cè)面上的感應(yīng)電荷電量相等而符號(hào)相反。感應(yīng)電荷在空間必然產(chǎn)生電場(chǎng),該電場(chǎng)與原來(lái)的電場(chǎng)疊加,改變了空間各處的電場(chǎng)分布。感應(yīng)電荷產(chǎn)生的電場(chǎng)稱為感應(yīng)電場(chǎng),用表示。空間任意一點(diǎn)的場(chǎng)強(qiáng)可表示為:

在金屬導(dǎo)體中,自由電子沒(méi)有定向運(yùn)動(dòng),其內(nèi)任一點(diǎn)的電場(chǎng)強(qiáng)度都等于零的狀態(tài)稱為靜電平衡狀態(tài)。
處于靜電平衡的金屬導(dǎo)體具有如下的性質(zhì):
①整個(gè)導(dǎo)體是等勢(shì)體,導(dǎo)體表面是等勢(shì)面。
②導(dǎo)體表面附近的場(chǎng)強(qiáng)處處與表面垂直。
靜電平衡的導(dǎo)體上的電荷分布具有以下規(guī)律:a.電荷只分布在導(dǎo)體的表面上;b.面電荷密度與電場(chǎng)強(qiáng)度的大小成正比;c.曲率越大的地方,面電荷密度也越大
3 充電法判定鋼筋籠長(zhǎng)度的解釋模型
充電法采用穩(wěn)定電流場(chǎng)即勢(shì)場(chǎng),勢(shì)場(chǎng)問(wèn)題的解即為解邊界問(wèn)題。可分為兩類,第一類問(wèn)題為已知帶電場(chǎng)源及相關(guān)的邊界條件,欲求其場(chǎng)的分布。第二類是感應(yīng)電場(chǎng)問(wèn)題,如導(dǎo)體置于外電場(chǎng)中,導(dǎo)體被極化,感應(yīng)電場(chǎng)與一次場(chǎng)相疊加即為滿足邊界條件的合電場(chǎng)。因此,充電勢(shì)場(chǎng)解釋的目的就是解決上述兩類問(wèn)題。
通常勢(shì)場(chǎng)的解釋模型分為兩類,一類是反演問(wèn)題,即已知場(chǎng)的分布去尋求場(chǎng)源,另一類是正演問(wèn)題,即是已知場(chǎng)源去尋求場(chǎng)的分布。通常物探方法對(duì)場(chǎng)源知之甚少,多為反演推斷問(wèn)題。然而,作為有限線源的鋼筋籠模型參數(shù)較明確(唯一要確定的就是長(zhǎng)度),因此,充電法判定鋼筋籠長(zhǎng)度的解釋模型可以完全以前面所討論的線型電場(chǎng)及感應(yīng)電場(chǎng)理論為依據(jù),采用正演擬合法進(jìn)行解釋(見(jiàn)圖2)。
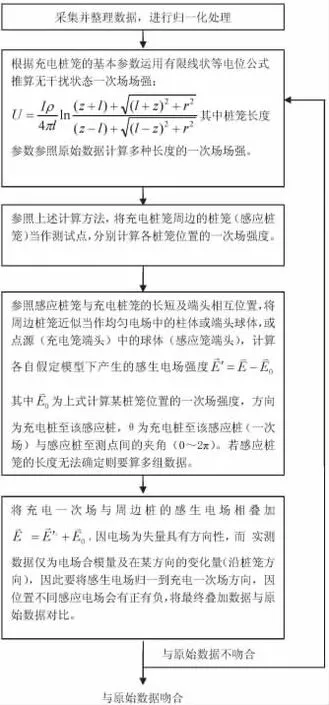
圖2 充電法判鋼筋籠長(zhǎng)度建模解釋流程圖
4 充電法判定鋼筋籠長(zhǎng)度的應(yīng)用實(shí)例及效果
實(shí)例為充電法在某棟樓群樁當(dāng)中較為典型的判別實(shí)例。
例中可看出在9m附近有較大峰值,可判為半籠的充電電位梯度曲線,由于受旁邊全籠的影響,在12m以下又迅速升起;而可判為全籠的充電電位梯度曲線由于受到旁邊半樁籠的影響,在9m附近有不同程度的小峰值;由此,可以看出樁籠之間的相互干擾,其相互影響的程度主要取決于充電目標(biāo)樁籠及周邊樁籠與檢測(cè)點(diǎn)的相對(duì)位置。
為了進(jìn)一部證實(shí)所作的推斷,對(duì)部分較典型的樁籠(2根)通過(guò)所建的解釋模型進(jìn)行了正演計(jì)算,所計(jì)算的理論曲線和實(shí)測(cè)曲線基本吻合,充分證實(shí)了該方法的有效性和合理性。
5 結(jié)論和認(rèn)識(shí)
①充電法作為一種人工穩(wěn)定等位線形場(chǎng)源,具有信號(hào)穩(wěn)定、抗干擾能力強(qiáng),操作靈活方便,解釋明晰簡(jiǎn)便等明顯的優(yōu)點(diǎn),定能在判定樁籠工作中發(fā)揮越來(lái)越大的作用。
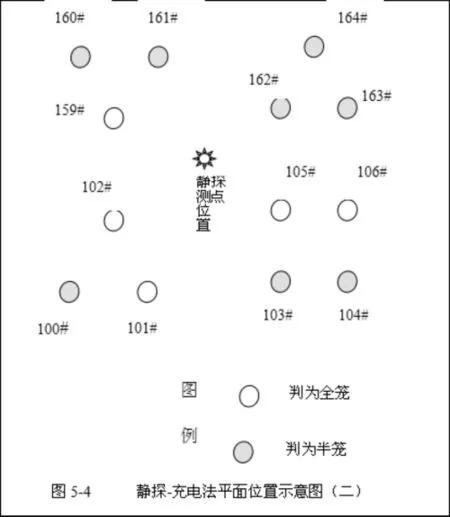
圖3 靜探-充電法平面位置示意圖(二)
充電法進(jìn)行群樁籠判定是一項(xiàng)具有挑戰(zhàn)性的工作,既可體現(xiàn)其方法的高效性(一孔多測(cè)),又由于樁籠的相互干擾,大大增加了其方法的復(fù)雜性,根據(jù)本人在幾千根群樁籠的判識(shí)實(shí)踐,得出如下幾點(diǎn)認(rèn)識(shí):
a.盡管樁籠為長(zhǎng)徑比較大的良導(dǎo)體,測(cè)距不易過(guò)大,從理論論證,到實(shí)判經(jīng)驗(yàn)可知:粗略判識(shí)時(shí)不易大于樁籠長(zhǎng)度的一半,精確判識(shí)時(shí)不易大于樁籠長(zhǎng)度的八分之一。
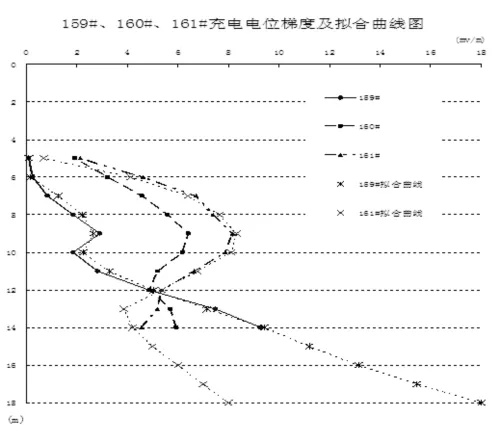
圖4 充電電位梯度及擬合曲線
b.群樁檢測(cè)時(shí),為盡可能減少相互干擾,測(cè)試孔應(yīng)打在群樁中間,使周邊測(cè)試樁籠與測(cè)試孔距離保持一致。
c.資料解釋?xiě)?yīng)遵循由近致遠(yuǎn),先易后難,逐點(diǎn)分析干擾源的判別原則,對(duì)于測(cè)點(diǎn)外圍的樁籠以及一次場(chǎng)干擾嚴(yán)重曲線難以判別的樁籠必需進(jìn)行多測(cè)點(diǎn)重復(fù)檢測(cè),綜合分析,以確保判識(shí)精度。