混合儲能在艦船中壓直流電力系統中的管理策略
2018-09-04 11:32:54于士振郭將馳張權寶
上海電機學院學報 2018年4期
關鍵詞:系統
郭 燚, 于士振, 郭將馳, 李 晗, 張權寶
(上海海事大學 物流工程學院, 上海 201306)
艦船動力系統的大小取決于艦載載荷總功率需求[1],電力需求在不久的將來將達到數百兆瓦[2]。艦船上有間歇性的脈沖載荷(電磁飛機發射系統、軌道電磁炮)、雷達、推進負載和服務性負載等,由于脈沖載荷的瞬態特性,它要求具有極高振幅的脈沖功率;而傳統的艦船電力系統難以支持脈沖負載功率需求。大功率脈沖性載荷接入中壓直流電力(Medium Voltage Direct Current, MVDC)系統會造成母線電壓大范圍跌宕,降低系統電能質量。根據相關標準,MVDC系統母線電壓需要保持在標稱電壓的10%范圍內[3]。高功率密度的超級電容器組由于具有快速反應能力可以滿足脈沖性載荷功率需求[4-6],高能量密度的鋰電池組可以長期支持發電機組來響應艦載載荷功率需求,避免啟動輔助發電機組,提升系統能源效率。因此,使用高能量密度的鋰電池組和高功率密度的超級電容器組組成混合能量存儲系統(Hybrid Energy Storage System, HESS)[7]成為解決此問題非常有應用前景的解決方案。由于艦船MVDC系統中的原動機與推進系統脫鉤,并與發電機相結合,所產生的電能可能會超出艦載載荷功率需求,HESS系統可以將這部分多余的能量存儲在儲能系統中,并在需要時返還MVDC系統。因此,能量儲能管理(Energy Storage Management,ESM)技術成為MVDC系統的重要選擇[4-5]。在文獻[8]中,模糊邏輯控制器用來控制電池和超級電容器,為電動車的儲能系統提供控制支持。文獻[9-11]設計了基于HESS混合動力船舶的能量管理策略。
本文對基于ESM和低通濾波器(Low Pass Filter,LPF)的模糊邏輯控制能量管理策略和PI控制器能量管理策略進行了比較分析,并對不同艦載載荷模式下的模糊邏輯能量管理策略進行仿真分析。通過仿真,驗證了所提方案的可行性。
1 ESM和LPF的模糊邏輯能量管理策略
ESM和LPF的模糊邏輯能量管理策略如圖1所示。

圖1 基于ESM和LPF的模糊邏輯能量管理框圖
模糊邏輯控制器根據母線電壓(UBUS),母線電流變化量(ΔI),鋰電池組荷電狀態(SOCBat),超級電容器組荷電狀態(SOCSC)估計HESS系統功率需求PStor-ref,經LPF功率高低分頻后分配給鋰電池組和超級電容器組來維持艦船MVDC系統功率的平衡。模糊邏輯控制器的輸入變量UBUS,ΔI,SOCBat,SOCSC,輸出變量Pstor-ref隸屬度函數如圖2所示。

(a) 母線電流變化量隸屬度函數

(b) 母線電壓隸屬度函數

(c) 鋰電池荷電狀態隸屬度函數

(d) 超級電容器荷電狀態隸屬度函數

(e) 輸出功率隸屬度函數
圖2模糊邏輯控制器輸入輸出變量隸屬度函數
對應的模糊邏輯控制規則如表1所示。

表1 模糊規則(P tot-ref)
注:L為低區間;M為適中區間;H為高區間;N為負功率;Z為零區間;P為正功率
2 ESM和LPF的PI控制器能量管理
基于ESM和LPF的PI控制器能量管理構架如圖3所示。
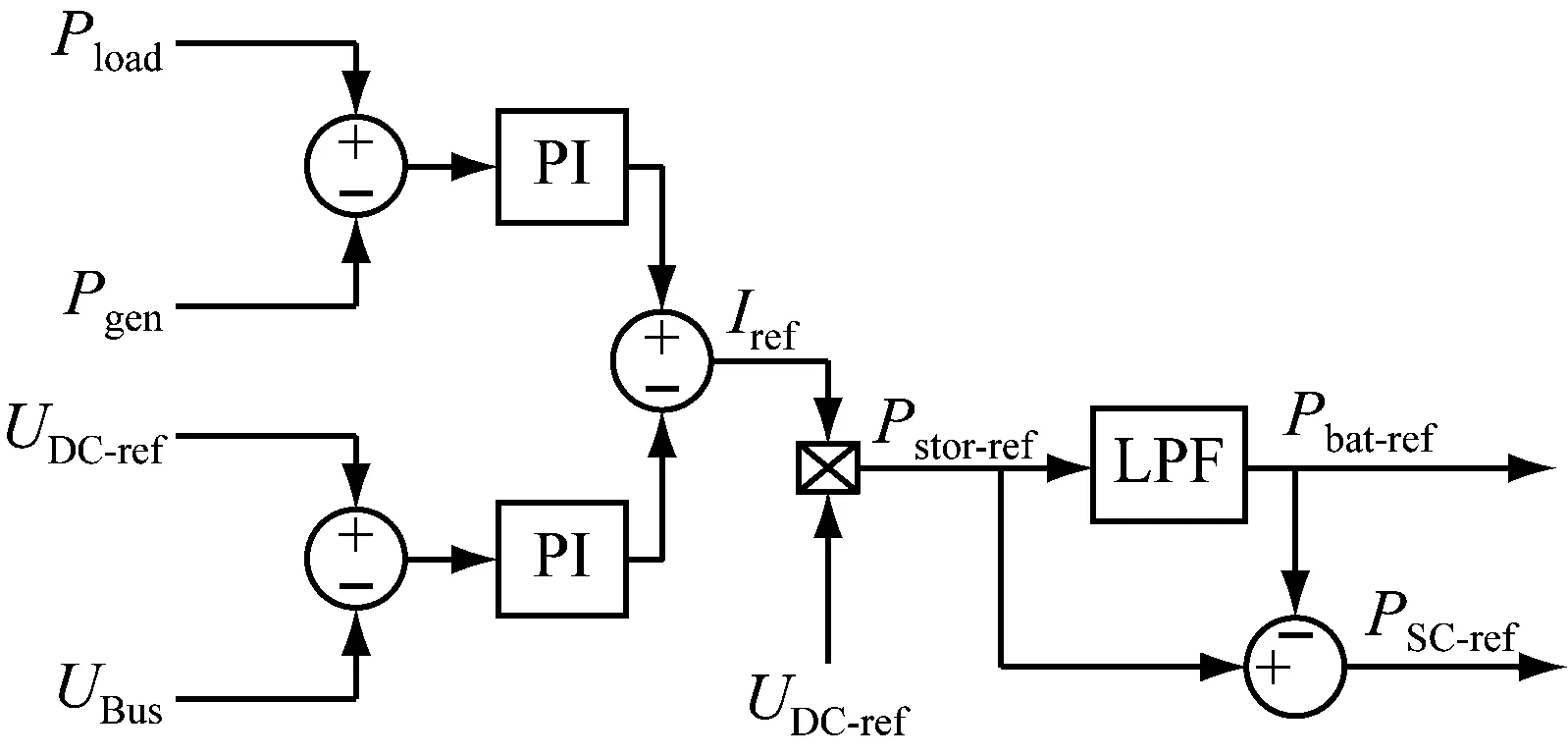
圖3 基于ESM和LPF的PI控制器能量管理框圖
PI控制器能量管理策略的目的是用來參考估計HESS系統功率(Pstor-ref)需求[12-13]。
圖3中有兩個PI控制器,第1個PI控制器根據艦載載荷(Pload)和艦船發電機組總發電功率(Pgen)保持艦船MVDC系統功率的平衡;第2個PI控制器用來維持艦船MVDC系統母線電壓的穩定。HESS系統功率需求PStor-ref通過LPF后分離出適合鋰電池組特性的低頻功率分量PBat-ref和超級電容器組特性的高頻功率分量。
LPF的傳遞函數為
(1)
式中:fc為截止頻率[14],因超級電容器組的工作時間為秒級,這里設置截止頻率為1 Hz[15]。
3 混合儲能系統變換器的設計
3.1 雙向DC-DC拓撲結構
PSC-ref和PBat-ref分別對DC/DC變換器進行充放電控制,其拓撲結構和控制系統框圖如圖4和圖5所示(圖5中PWM為脈沖寬度調制)。

圖4 雙向DC/DC拓撲結構

圖5 鋰電池組和超級電容器組電流控制
3.2 HESS結構
HESS混合儲能結構如圖6所示。HESS系統中5組鋰電池組和5組超級電容器組,均為輸入并聯輸出串聯,5組鋰電池組模塊輸出與5組超級電容器組模塊輸出采用并聯結構,斷路器用來保護HESS系統,在系統需要維護或出現故障時,斷開與MVDC系統的聯接。
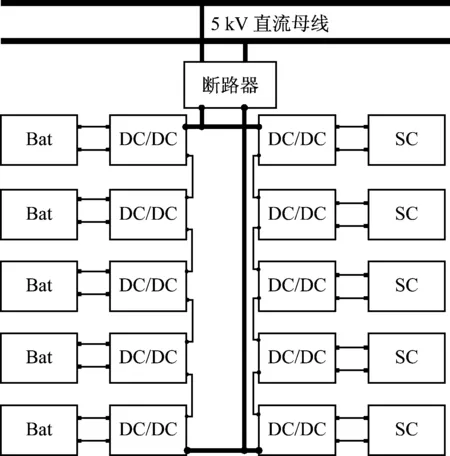
圖6 HESS混合儲能結構圖
這種結構的好處是通過串聯可以降低開關管的電壓應力,交錯并聯可以降低開關管的電流應力,同時可以降低電壓電流紋波,減輕了鋰電池組和超級電容器因電流紋波引起的發熱現象[16];同時,該結構適合大電流、大功率傳輸。而且鋰電池組模塊和超級電容器模塊分別分為5組,在1組損壞時,其他鋰電池組和超級電容器組還可以繼續工作,提高了可靠性。不足之處是沒有實現電氣隔離。
4 仿真分析
4.1 參數設置
MVDC電力系統參數:電源MGT1功率為36 MW,AGT2功率為4 MW,MVDC總發電功率為40 MW;負載:恒功率負載為40 MW,脈沖負載為4 MW,總負載功率為44 MW。
Hess系統參數:鋰電池組額定容量為544 Ah,額定電壓為800 V,充滿電壓為931 V,初始荷電狀態為85%;超級電容器組額定容量為200 F,額定電壓為850 V,初始電壓為723 V,初始荷電狀態84.8%。
4.2 PI控制器和模糊邏輯控制器對比分析
鋰電池組和超級電容器組的初始荷電狀態分別設置為85%。MVDC母線電壓和電流如圖7所示。
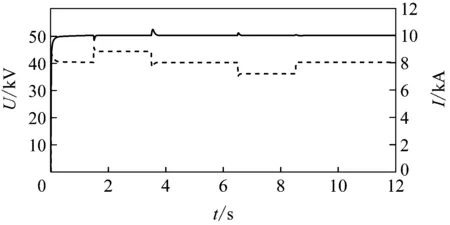
圖7 MVDC母線電壓、電流波形
從圖7可以看出:1.5~3.5 s,4 MW脈沖負載加載到MVDC系統上,系統母線電壓瞬時跌落,母線電流瞬時增加。在6.5~8.5 s,4 MW載荷從MVDC系統瞬時解列,母線電壓瞬時增加,母線電流減小。
ESM和LPF的模糊控制器預測的HESS系統功率參考如圖8所示。
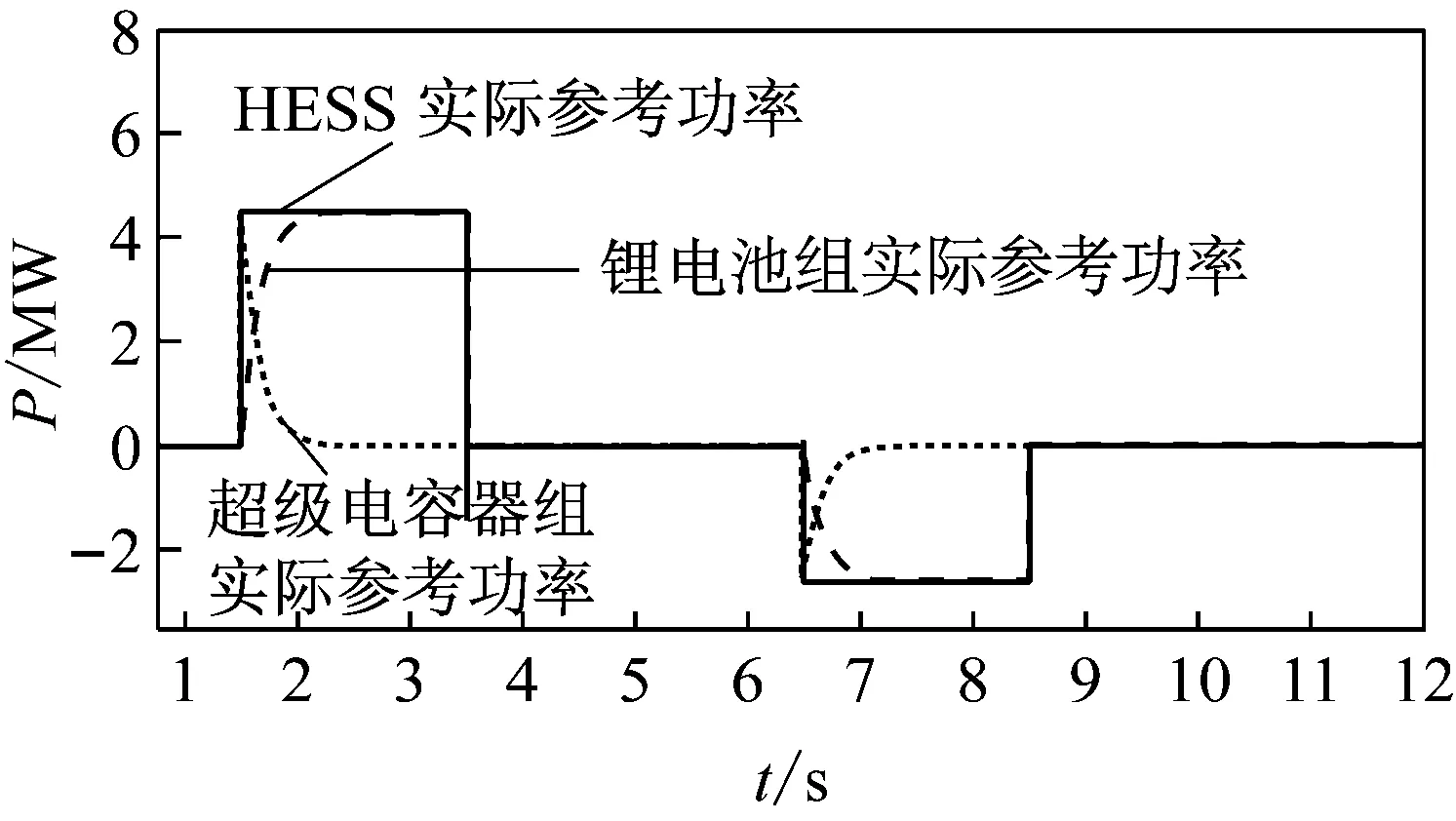
圖8 HESS總存儲參考功率及其功率分配圖
圖8中,因SOCBat,SOCSC高達85%和84.8%,HESS系統存儲有大量能量,因此,1.5~3.5 s模糊邏輯控制器產生的HESS實際參考功率約為4.5 MW而不是4 MW。在這種情況下,艦船總可用功率約為44.5 MW,而總載荷需求為40 MW。此時發電機組將通過控制燃氣輪機自動減少0.5 MW的能量供應。在6.5~8.5 s,4 MW的載荷從MVDC系統解列,模糊邏輯控制器產生的HESS參考功率約為-2.5 MW,由于此時鋰電池組和超級電容器組荷電狀態較高,HESS不需要快速充電。此時發電機組將通過控制燃氣輪機自動減少1.5 MW的能量供應。
ESM和LPF的PI控制器產生的HESS系統功率參考如圖9所示。
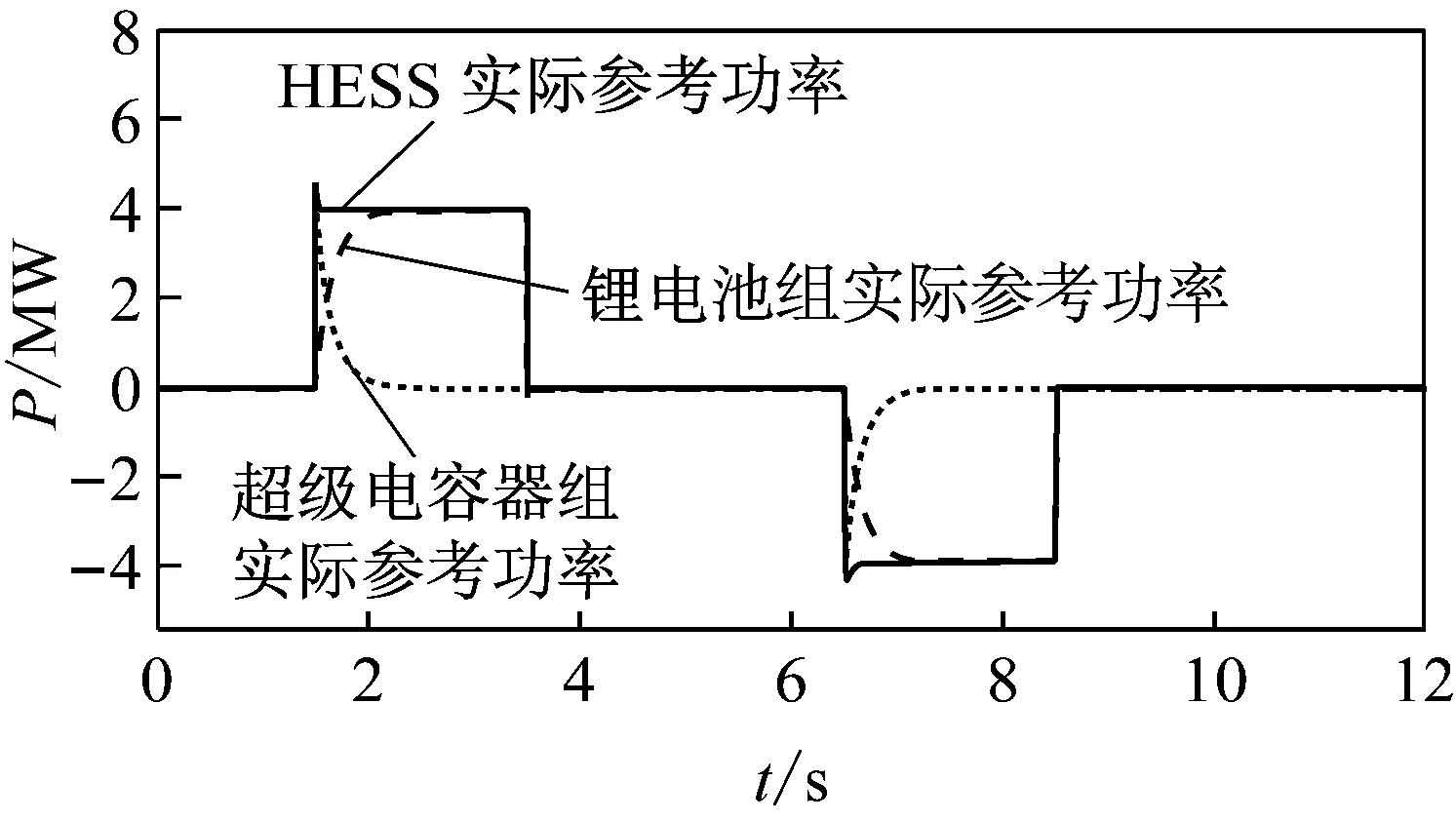
圖9 HESS總存儲參考功率及其功率分配圖
從圖9中可以看出:PI控制器可以較為準確地估計負載變化,通過LPF高低功率分頻后控制HESS充放電,避免了MVDC系統的母線電壓因負荷突升突降引起的母線電壓大范圍跌宕的發生。
仿真結果表明:基于ESM和LPF的PI控制器能量管理策略能夠較為準確地估計Pstor-ref,從而對HESS進行充放電管理,維持MVDC系統功率的平衡,防止因脈沖性負載突升突降引起的MVDC系統母線電壓大范圍跌宕的發生。模糊邏輯控制器不但能夠預測Pstor-ref,而且能夠根據SOCBat和SOCSC的狀態調整Pstor-ref的基準,對HESS系統進行充放電管理。由此可知,基于ESM和LPF的模糊邏輯能量管理策略優于基于ESM和LPF的PI控制器能量管理策略。
4.3 不同艦載載荷模式下模糊能量管理仿真分析
艦船MVDC系統負荷功率需求曲線和MVDC系統母線電壓如圖10和圖11所示。
從圖10可以看出:在t=2 s, 艦船總負荷功率需求為39 MW,其推進電動機轉速達118 r/min,艦船處于正常巡航狀態。這種狀態一直持續到t=2.5 s。在t=2.5 s,艦船因特殊工作需要加速行駛,其轉速在t=3 s達到120 r/min,其負荷功率需求達41 MW,超出艦船發電機組總發電功率40MW。在這種狀態下,HESS系統需向艦船MVDC系統提供能量去支持發電機組,降低艦船發電機組供電壓力。這種狀態一直持續到t=4.5 s。模糊邏輯控制器在此階段產生的HESS功率參考約為2.5 MW,因為此時鋰電池組和超級電容器組的SOC分別為75%和75.01%,處于適中狀態。HESS有足夠的能量去響應系統負荷功率需求。
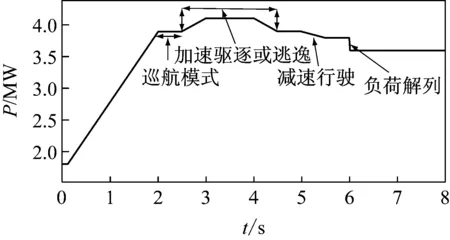
圖10 艦船MVDC系統負載荷功率需求曲線圖
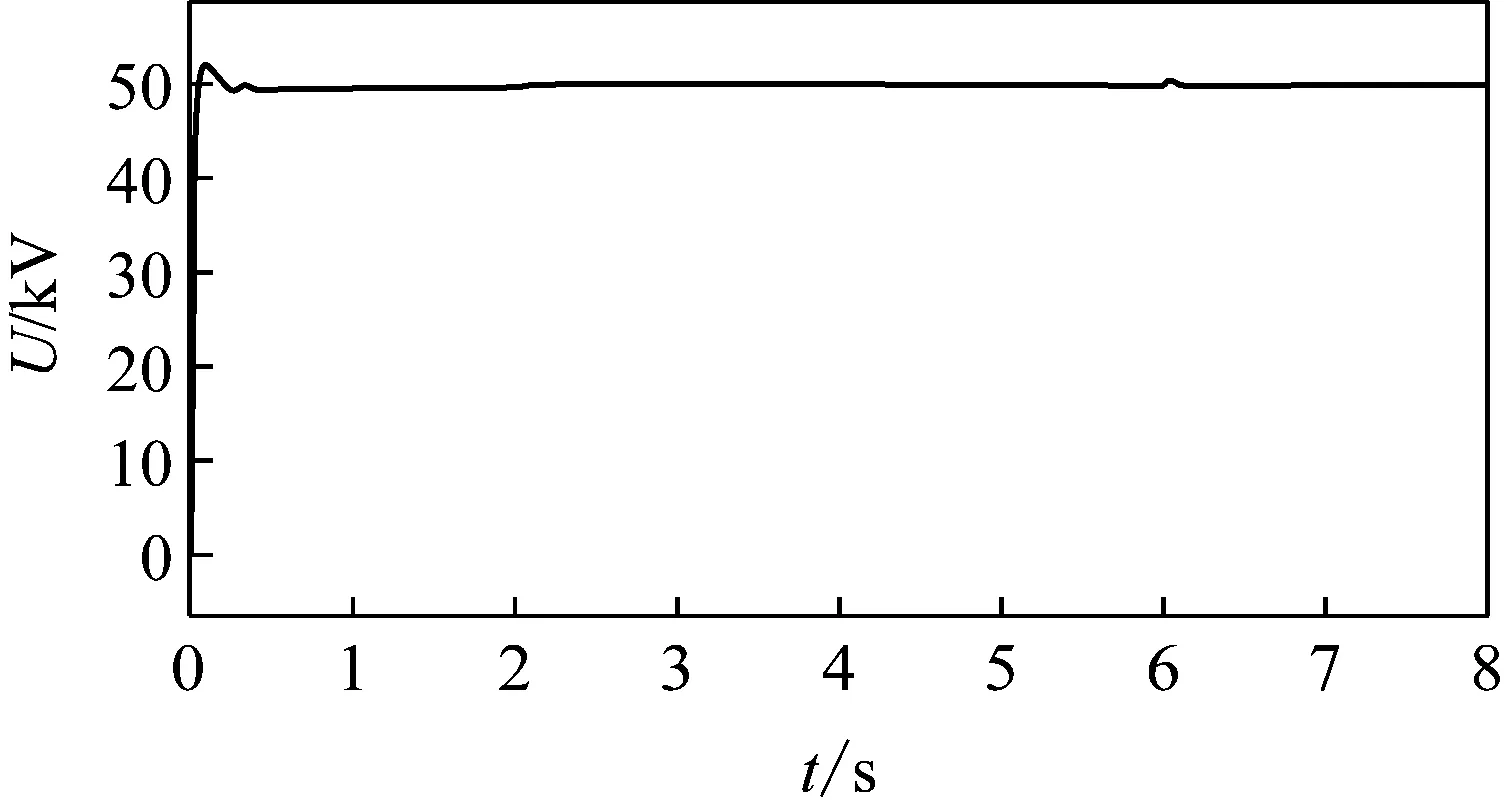
圖11 MVDC系統母線電壓圖
ESM和LPF模糊能量管理預測HESS系統功率需求如圖12所示。

圖12 HESS系統功率需求圖
在t=5 s,艦船減速行駛,其推進電動機轉速由118 r/min降到115 r/min。在t=6 s,2 MW的艦載載荷從系統瞬間解列,MVDC系統能量盈余,模糊邏輯控制器產生的HESS需求功率約為-2 MW,MVDC系統多余能量被HESS吸收,在系統需要時再返還MVDC系統,避免能源的浪費,提升MVDC系統總體能源利用效率。
7 結 語
本文對基于ESM和LPF的模糊邏輯控制器能量管理策略和PI控制器能量管理策略進行了分析比較,通過仿真分析得出:基于ESM和LPF的模糊邏輯控制器能量管理策略優于基于ESM和LPF的PI控制器能量管理策略;同時對HESS的能量管理,平滑抑制了艦船MVDC系統母線電壓大范圍跌宕的發生,提升了艦船MVDC系統的穩定性和生存能力。針對艦船不同載荷功率需求模糊能量管理策略,當推進電動機全速運行,負載載荷功率超出發電機總發出功率時,HESS響應MVDC系統功率需求,維持系統功率的平衡,提升了MVDC系統的穩定性、電網的電能質量和系統整體能源利用效率。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
