殘余總線仿真平臺在新能源汽車上的應用
2018-09-05 02:54:34熊杰金振華
車用發動機 2018年4期
熊杰,金振華,2
(1.清華大學汽車工程系國家重點實驗室,北京 100084;2.北京電動車輛協同創新中心,北京 100084)
新能源車相對傳統燃油汽車有節能環保的優勢,隨著國家對環境治理的不斷重視,新能源車也迎來了越來越好的發展時機。新能源車控制器的開發是新能源車發展的重要內容,控制器在前期開發過程中,需要大量的臺架試驗和道路試驗[1-3]。新能源車上有整車控制器、BMS控制器、電機控制器等,汽車控制器之間通過內部高速CAN總線進行數據通信。如果要驗證目標控制器的內部CAN通信功能,按常規的測試方法,需要連接多個控制器實物進行通信,國內外臺架測試一般使用這種方案,其優勢是測試結果更接近真實情況,不足是系統復雜,成本高。采用殘余總線仿真的方法可以驗證目標控制器的CAN通信功能,減少控制器測試系統的復雜度并大大降低測試成本[4-7]。本研究提出了一種新能源汽車控制器殘余總線測試平臺的設計方法,可以有效驗證目標控制器的CAN通信功能。
1 總體設計
新能源車控制器主要有整車控制器、電機控制器、電池管理系統控制器等[8-14]。殘余總線仿真系統原理見圖1。上位機運行Windows操作系統和NI Veristand軟件測試環境。殘余總線仿真的目的是通過計算機仿真模型來模擬CAN通信網絡中除待測控制器以外的CAN通信節點。在整個CAN通信網絡中,其實是一個真實的待測控制器和多個虛擬的控制器進行CAN通信。這些虛擬的控制器我們稱為VECU,這些VECU根據它們功能特點的不同,有不同的算法模型,這些算法模型通常使用第三方工具MATLAB/Simulink/Stateflow搭建。通過離線仿真可以對VECU的算法模型進行初步的功能驗證。模型通過上位機電腦MATLAB/Simulink軟件編譯器編譯為DLL文件,下載到一個運行實時操作系統的基于PXI架構的實時控制器上就可以實時運行了,VECU算法模型的輸入輸出參數可以很方便地映射到實時控制器硬件板卡的相應I/O通道上。在上位機電腦上通過Veristand軟件平臺可以實時控制多個VECU的CAN通信狀態,在PXI實時控制器中可以下載并運行多個VECU的模型。待測ECU在與VECU進行CAN通信時,其通信過程和真實的ECU通信是一樣的,可以通過觀測通信總線的狀態和信號傳遞時序發現CAN通信是否正常工作,比如數據幀是否有丟幀等情況。用殘余總線仿真平臺進行待測控制器的CAN通信功能測試和用實物控制器進行CAN通信功能測試相比較,可以評估殘余總線仿真的有效性。

圖1 殘余總線仿真系統原理
2 硬件設計
本研究設計的殘余總線仿真系統采用基于PXI架構的實時控制器及配套的I/O接口板卡搭建。PXI是一種開放的儀器總線,它的特點是具備堅固的工業封裝以及插針式結構,具有豐富的I/O、通信接口卡以及定時和觸發能力[13]。殘余總線仿真系統硬件設計見圖2。系統組成結構包括上位機、下位機及信號接口板。上位機采用一臺工業控制PC,安裝有Veristand軟件環境以及Visual Studio C代碼編譯器。下位機結構包括PXI-1062機箱、PXI-8115控制器、PXI-8512 CAN通信接口卡。信號接口板的作用是將各個板卡的I/O信號線引出,方便與待測控制器進行線束連接。下位機硬件為PXI系統,在PXI實時控制器上運行PharLab實時操作系統,通過TCP/IP網絡方式與上位機連接,其功能主要是實現程序的下載和實時數據的傳輸,實現上位機對整個系統主要參數的實時觀測。
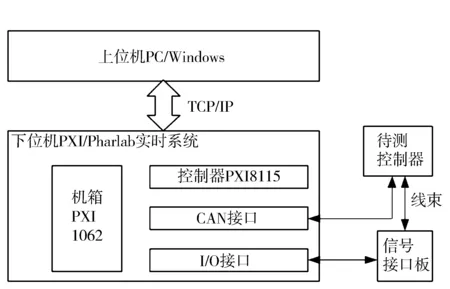
圖2 殘余總線仿真系統硬件設計
3 軟件設計
3.1 基于Veristand的軟件設計
Veristand是針對HiL仿真測試系統而開發的軟件環境,其工作原理見圖3。
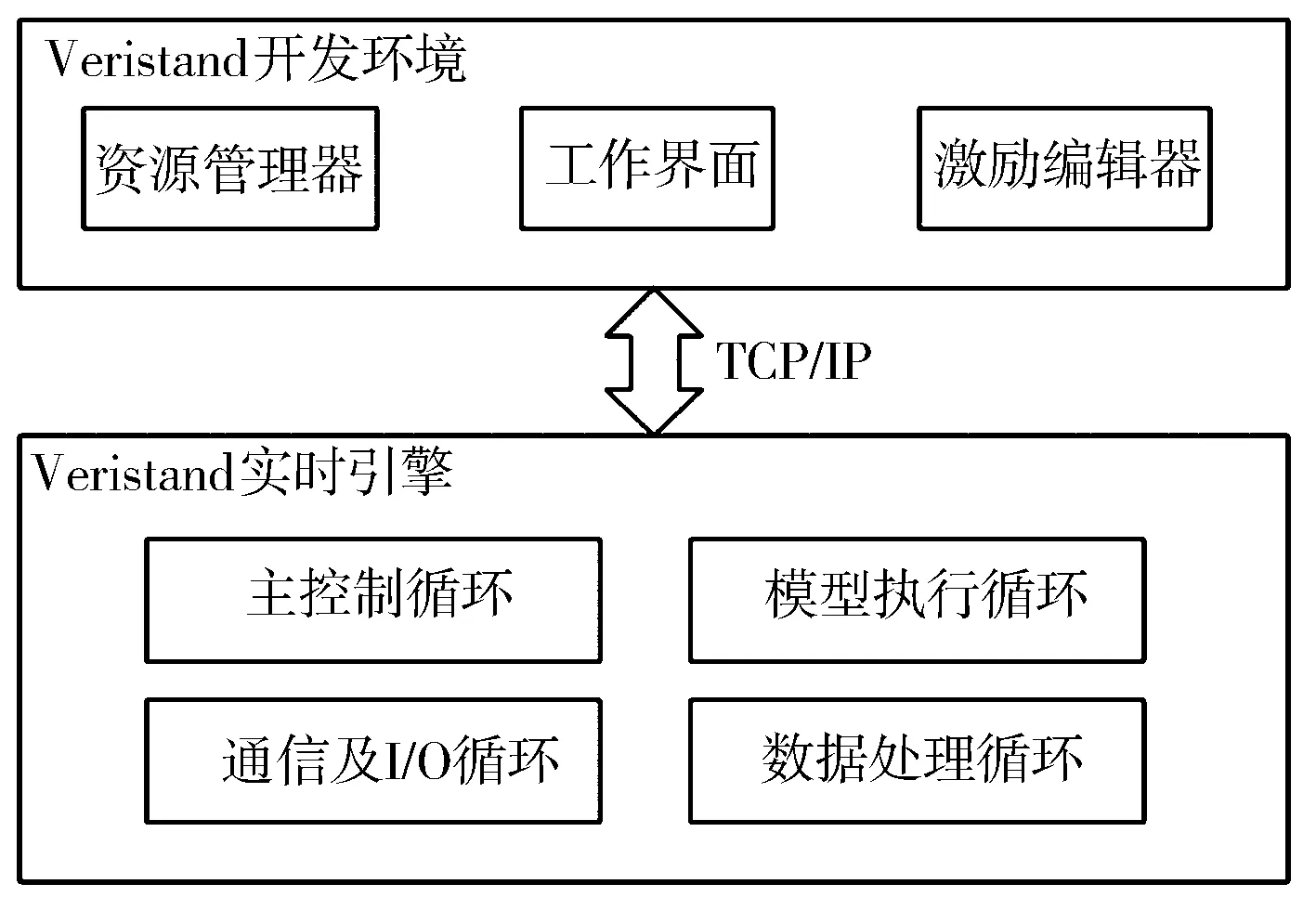
圖3 Veristand工作原理
Veristand能夠配置模擬、數字和基于FPGA的硬件I/O接口,能夠從NI LabVIEW和MathWorks Simulink等建模環境中導入控制算法和仿真模型,能夠配置激勵生成、記錄數據、計算通道和事件報警,能夠利用操作界面實時在線監控運行任務并與之交互。Veristand開發環境運行于上位機,其中資源管理器對實時應用程序進行定義,一個典型的實時應用程序需要配置控制模型、硬件I/O接口及通信接口;工作界面包含可自由編輯的人機接口界面,界面主要有多種輸入控件和顯示控件可以與實時應用程序進行交互;激勵編輯器用于創建測試腳本,可以實現自動化測試。Veristand實時引擎在下位機運行,主要實現模型算法的運行、參數更新、I/O通道刷新以及參數和故障報警燈功能。其通過TCP/IP網絡與上位機進行通信,發送實時的運行數據,同時接收上位機設定的相關參數。Veristand定時功能由硬件來實現,控制精度可達微秒級別,同時引擎可執行多個定時循環。
3.2 充電機模型
本研究以車載充電機作為一個CAN通信節點與BCU進行通信。充電機Stateflow模型(見圖4)主要分三部分:初始化、充電循環、充電結束。初始化模塊主要對充電機狀態進行初始化,充電機狀態包括充電機工作狀態、充電機充電電流、充電機充電電壓;充電循環模塊功能是與BMS進行握手通信后,按照BMS充電指令進行充電循環;充電結束模塊判斷電池是否充滿電量和充電異常情況,如果滿足條件將會關閉充電機輸出,停止工作。
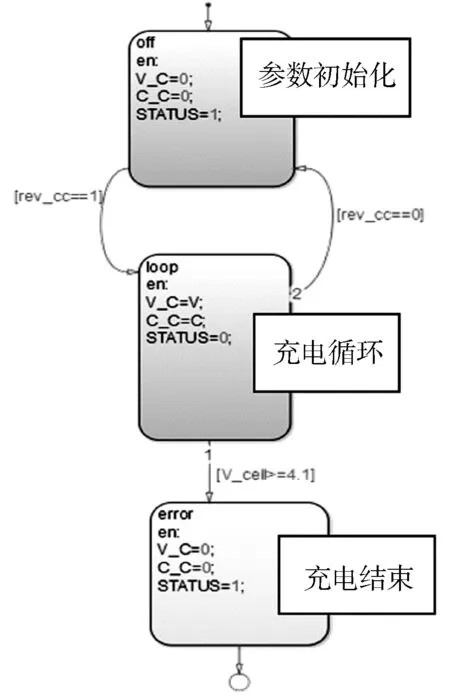
圖4 充電機模型
3.3 電池模型
電池模型(見圖5)采用二階電池模型,戴維南等效電路模型。電池模型主要有三個模塊:SOC計算、電壓計算、極化電流計算。電池模型有2個獨立的回路,一個是電流源,一個是電壓源,可以仿真電池的極化現象和自放電現象[14-15]。在電池放電達到截止電壓時,定義SOC為0,而電池完全充滿到最高截止電壓時,SOC為100%。電池的端電壓可以通過電池管理監測芯片實時采集,用來判斷電池的SOC狀態。
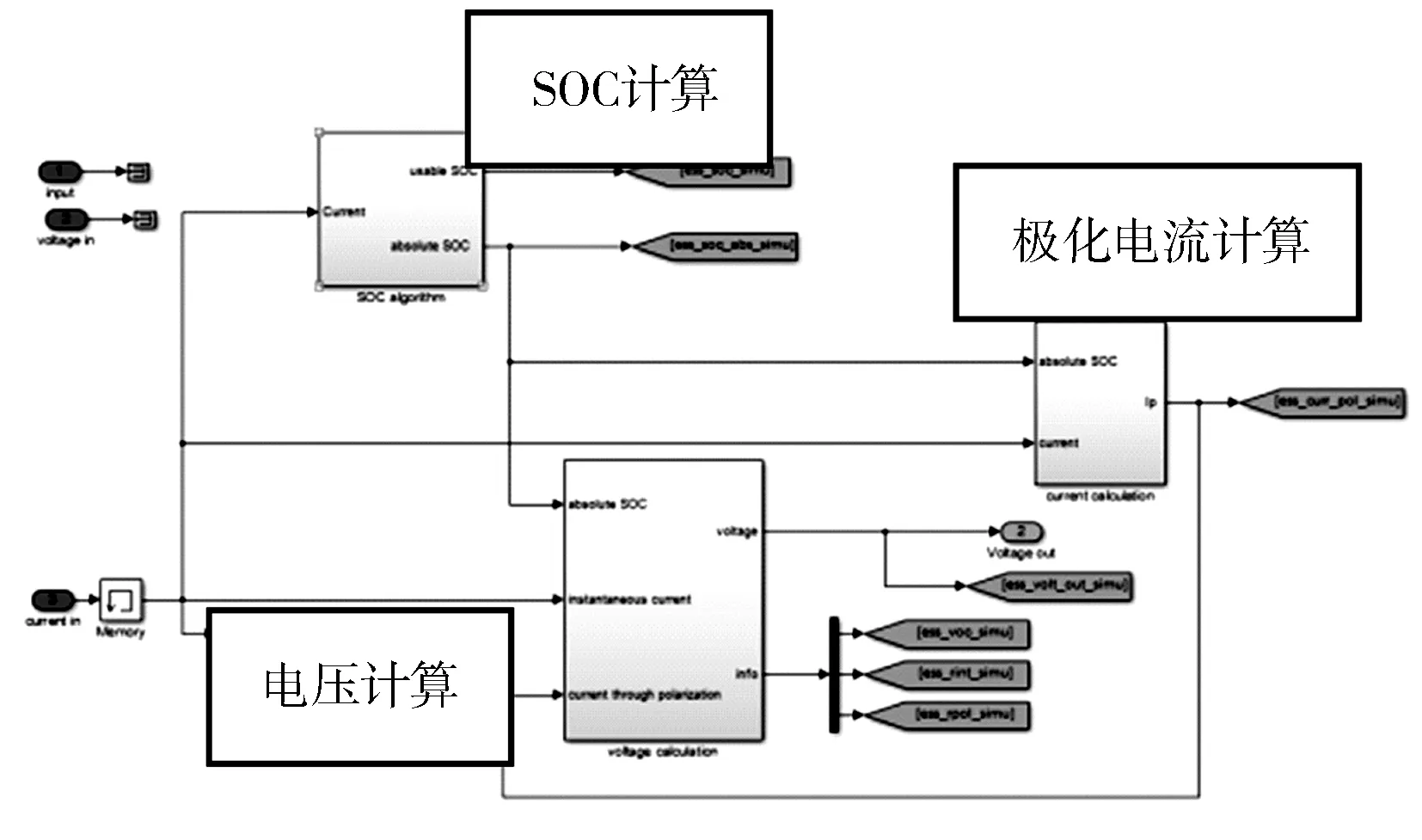
圖5 電池模型
在電池電路模型中,SOC是一個很重要的參數。計算公式如下:
(1)
(2)
Ip=f(SOC,Iinstant),
(3)
VOC=f(SOC,Ip,Iinstant)。
(4)
式中:Qr為剩余電量;Qi為初始的Ah數;Q0為標定Ah數;SOC為荷電狀態;Iinstant為瞬時電流;Ip為極化電流;VOC為電池開路電壓。
電池模型中單體電壓可以隨著充電機充電參數的變化而變化。
4 應用
殘余總線測試適用于需要對被測ECU進行多個相關聯ECU的CAN通信聯調的情況。本研究待測ECU選擇BMS的主控制器BCU,測試界面見圖6。測試界面可以監測充電機和BCU的CAN通信數據和狀態,也可以仿真BMU的功能進行電池參數采集后通過CAN數據發送,在上位機可以直接控制BMU的輸出數據,實現BCU控制策略算法的驗證。

圖6 測試界面
4.1 BCU與BMU的通信測試
本研究待測的控制器是某混合動力汽車所用的BMS,該BMS采用主從結構,即有一個主控制器BCU,一個從控制器BMU。主控器BCU主要功能包括SOC算法、均衡策略算法、安全策略、CAN通信、充放電管理、溫度管理。從控制器BMU主要功能是單體電壓采集、溫度采集、均衡功能。
表1示出虛擬的BMU與真實BCU進行CAN通信的部分數據。此系統可以實時測試BCU與BMU的通信功能,如果有通信異常或報錯會在Veristand的人機接口界面實時觀測到。此系統也可以通過Veristand軟件環境注入故障信息,觀察BCU的響應,此功能不作詳細描述。
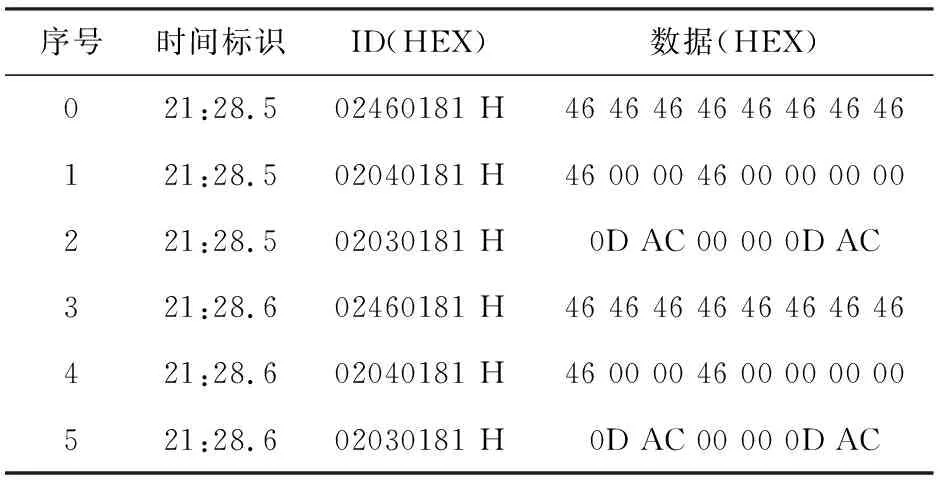
表1 BMS內部CAN通信部分數據
4.2 BCU與充電機通信
本研究需要仿真的充電機為車載充電機,型號為CH4110-14420,適用于144 V鋰電池組,輸入電壓是220 V,額定輸出電壓是144 V,充電電流最大20 A。車載充電機具有CAN通信功能,這樣有利于在充電過程中隨時控制充電機的狀態。因此將該款充電機作為CAN通信網絡中的一個通信節點,可以與CAN通信總線進行數據通信,也可以與通信總線上的其他CAN通信節點進行數據通信。在充電前,BCU需要和充電機進行CAN通信握手,充電機向BCU發送充電機是否允許充電的CAN報文(0x1806E5F4),如果允許充電,BCU會發送一幀CAN報文命令(0x18FF50E5),根據鋰電池當前的狀態,輸出鋰電池需要的最大充電電壓、最大充電電流和充電機控制字狀態。
本研究針對BCU進行殘余總線仿真測試,充電機作為CAN通信網絡中的一個通信節點,采用計算機模型仿真取代真實的充電機,方便進行充電機控制和測試,也更加安全。表2示出了BCU和充電機的CAN通信過程。
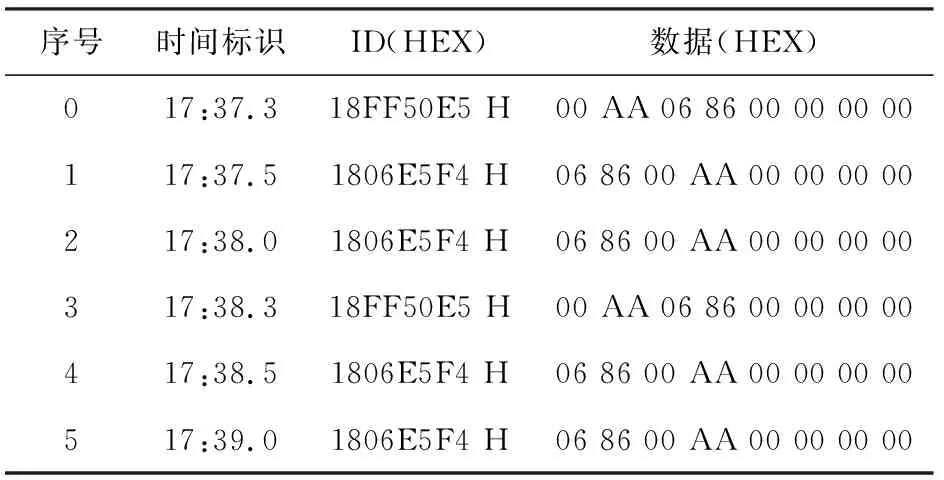
表2 BCU與充電機CAN通信部分數據
對于充電機和BCU之間的通信故障、通信延時等問題,都可以通過殘余總線仿真測試系統進行觀察和調試。根據充電機和BCU的通信時序(見圖7),可以知道兩個CAN通信節點之間的通信過程,通過殘余總線仿真平臺試驗可以得到兩者通信的通信時序。
圖8示出了多個ECU進行聯調BCU的響應情況。試驗過程中,只有被測對象BCU采用了實物,而其他ECU為VECU,即模型算法。在試驗前,已知鋰電池單體的允許最高電壓為4.15 V,當超過該值繼續充電的話,會嚴重損害電池。電池管理系統具有單體電池過高保護功能,如果單體電壓超過限值,BCU會強制斷開充電回路。在試驗過程中,可以在上位機通過Veristand軟件平臺對整個殘余總線仿真系統進行監控和實時控制。通過在上位機控制面板上控制電池模型的電壓輸出參數,可以給某個單體電池提高電壓以達到加快試驗進度的作用。正常充電過程中,充電電壓(CAN_CCS_CHAR_V)和充電電流(CAN_CCS_CHAR_C)分別為160 V和17 A,當單體最高電壓在7:20時刻達到4.15 V以上,會觸發BCU的安全保護控制策略,BCU會向充電機發送CAN控制命令停止充電機充電,此時BCU發送的控制命令字節(CAN_BMS_CTL_CHA)值為1,充電機的充電電壓(CAN_CCS_CHAR_V)和充電電流(CAN_CCS_CHAR_C)輸出都為0。當單體最高電壓降低到4.15 V以下時,BCU經過t時間(程序設置的延遲時間)的延時后會重新進入充電循環,此時BCU發送的控制命令字節(CAN_BMS_CTL_CHA)值為0,此時單體最高電壓在7:50時刻降低到4.1 V,充電機的充電電壓還是160 V,充電電流已經下降到10 A。當單體電池的電壓再次充電到4.15 V以上時,在8:50時刻,BCU又給充電機發送了停機指令,充電機的充電電壓和充電電流又迅速降為0。BCU響應結果與預設的結果一致,即證明本研究設計的殘余總線仿真系統具有驗證控制器的控制策略的功能。
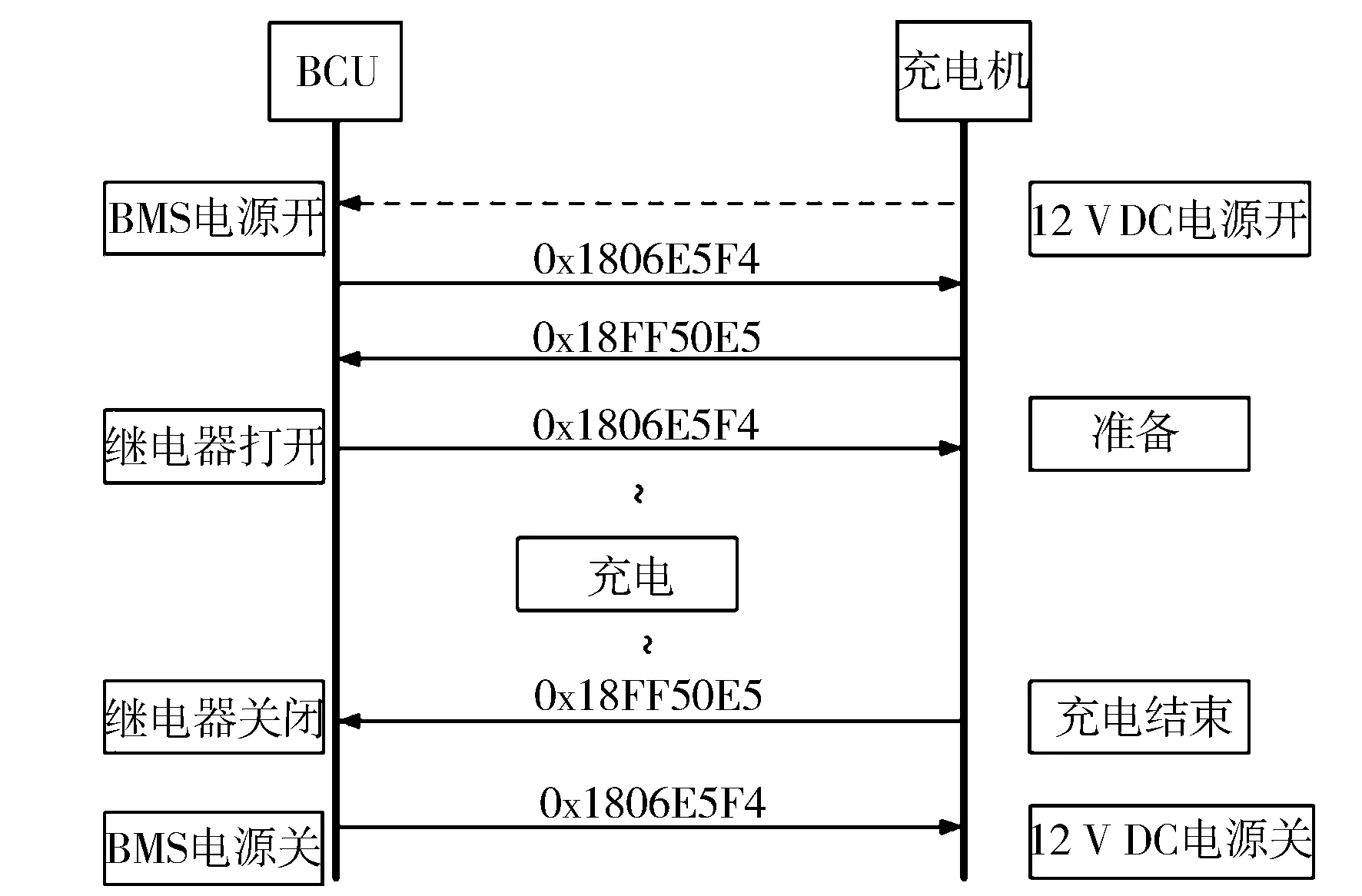
圖7 充電過程通信時序圖

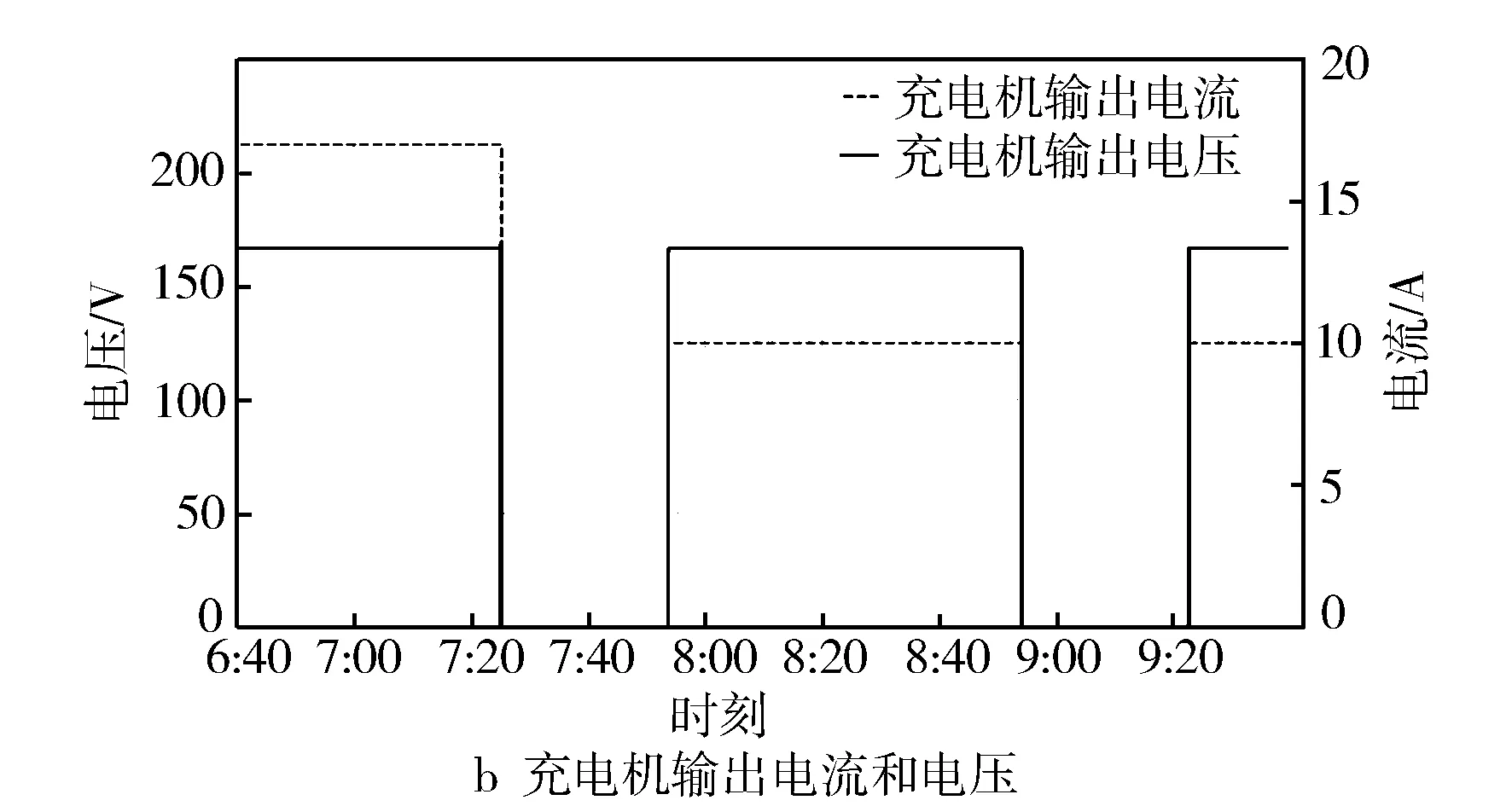
圖8 BMS充電功能驗證
5 結束語
基于PXI實時控制器搭建一套控制器HIL測試系統。該HIL系統主要應用于控制器的CAN通信總線測試,通過殘余總線仿真技術,大大降低了系統復雜度,降低了系統的測試成本,提高了測試效率。該仿真平臺可以用于BMS通信功能測試中。對BMS進行通信功能測試只是殘余總線仿真技術應用的一個方向,采用類似的設計思路,可以容易地搭建新能源汽車其他控制器的CAN通信測試系統,比如可用于整車控制器、電機控制器等ECU的殘余總線測試。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
光學精密工程(2016年6期)2016-11-07 09:07:19
