基于改進差分進化的車用驅動電機智能設計
2018-09-05 12:44:32羅子良裴同豪單豐武
微特電機 2018年8期
關鍵詞:優化
羅子良,裴同豪,單豐武,陳 紅
(1.深圳市大地和電氣股份有限公司,深圳 518106;2.華中科技大學,武漢 430074;3.江西江鈴集團新能源汽車有限公司,南昌 330000;4.濰坊光電產業園服務中心,濰坊 261061)
0 引 言
近幾十年來,由于環境的不斷惡化,節能減排越發成為各領域的關注點。在這個大背景下,國家在“十三五”規劃中大力提倡發展電動汽車,起動禁售燃油汽車時刻表研究,并通過大量國家、地方政策大力推進電動汽車行業的發展升級。在電動汽車電機、電控及電池中,驅動電機的性能優劣對電動汽車整車性能有著舉足輕重的影響。高性能電動汽車驅動電機是目前各電動汽車廠商與相關科研機構的研發重點之一。當前的車用驅動電機主要包括異步電機、開關磁阻電機和永磁同步電機等。其中,異步電機具有成本低、過載能力強、維護簡單的優勢,但是控制系統復雜、電機效率低等缺點制約了其在車用驅動電機領域的進一步推廣。開關磁阻電機轉子結構堅固,過載能力強,調速范圍寬,然而功率因數低,電機效率不高,并且轉矩波動大,應用于逆變器與電池容量有限的車用驅動電機領域有一定的挑戰。永磁同步電機由于采用永磁體勵磁,電機效率與功率因數高,電機功率密度高,轉矩波動小,當使用內置式永磁轉子時調速范圍較寬,被廣泛運用于車用驅動電機領域[1-4]。
由于車用驅動電機安裝于汽車上,面臨嚴格的體積、質量限制以及惡劣的使用環境。一方面由于電動汽車需要滿足起停性能、加減速性能等,這要求電動汽車驅動電機能夠在低轉速情況下輸出大轉矩,并且有較寬的高速恒功率調速范圍。同時,為了提高車輛的噪聲、振動與聲振粗糙度(NVH)性能,電機轉矩波動不能太大。另一方面,內置式永磁同步電機本身結構參數復雜,在用于車用驅動電機時,需要修改眾多電機結構參數,以滿足車用驅動電機的多項性能指標。這就需要進行多目標多變量綜合優化。然而傳統人工優化方法難以充分考慮多個參數同時優化時不同參數相互之間的對各自最優值的影響,難以綜合考慮多個優化目標對各優化參數最優值的不同要求,優化工作的復雜度與優化所需時間隨優化參數與優化目標個數的增多成指數級上升,甚至可能由于需要耗費不現實的優化時間而導致無法實現多目標多變量優化。國內外也有一些文獻提及運用遺傳算法(GA)、擬退火算法(SA)、粒子群算法(PSO)等智能先進算法進行多變量優化,取得了不錯的成果,但是對于優化過程中的全局搜索性能與局部搜索性能、優化算法自身參數敏感性等方面還有進一步研究的必要。同時,為解決多目標優化問題,國內外多采用綜合優化函數的方法,將多目標問題轉化為單目標問題,在某種意義上實現了多目標優化。然而該方法優化結果與綜合優化函數構造有密切關系,且優化結果集中于一點,無法全面直觀地顯示優化結果在優化目標平面上的相對位置,難以確定該優化結果就是優化目標指標范圍內的最優解[5-7]。
本文就此介紹差分進化算法與帕累托算法,其中差分進化算法由于特殊的算法實現步驟,在遺傳算法的基礎上取消了其隨機突變幅度產生函數,改為根據當代優化結果的密集程度自動調整突變幅度,突變幅度更符合當代優化結果的要求。相對于遺傳算法,更自動地綜合了優化算法全局搜索能力與局部搜索能力。為了解決多目標優化綜合優化函數構造困難的問題,引入了帕累托算法,不再將多變量綜合為單變量優化,從而優化效果更加全面,也能更直觀地選擇最適最優電機參數組合。在這2種算法的基礎上,本文提出了一種改進型自動智能優化方法,并運用MATLAB與Ansoft聯合仿真實現了對電機的自動智能優化。
1 差分進化算法
差分進化算法、遺傳算法以及粒子群算法有著相當緊密的聯系。差分進化算法與粒子群算法和遺傳算法一樣,都依靠“群體智能理論”進行啟發式優化。差分進化算法優化流程與遺傳算法相似,但突變擾動由當前種群中個體的差異性自動產生(如式1),與遺傳算法依靠隨機數產生不同。依靠這種特殊的優化策略,差分進化算法既可以保留遺傳算法簡單的遺傳操作,又可以根據最新的優化結果,實時調整全局搜索與局部搜索的比重,同時實現了較好的全局搜索性能與局部搜索精度,擁有較好的魯棒性,也能實現與粒子群算法一樣的記憶功能,通過記憶歷史優化過程中的較優解集,并加入之后的優化競爭過程,減少了部分全局較優解被意外舍棄而導致陷入局部最優解情況的發生[8-10]。
Pnew=γPbest+(1-γ)Pa+F·(Pb-Pc)
(1)
式中:Pnew為新一代種群中的個體的優化參數矢量;Pbest為當前種群中的最優個體的優化參數矢量;Pa,Pb,Pc為當前種群中不同于最優個體的隨機3個個體的優化參數矢量。γ為貪婪策略權重,F為突變比例系數。
對于車用驅動電機優化問題:
(2)
式(2)的優化問題有i個優化目標,xk(k=1,2,…,j)為電機參數變量,其邊界條件如下:
xk_min≤xk≤xk_maxk=1,2,…,j
(3)
電機的n個約束條件,如下:
(4)
2 帕累托算法
傳統的差分進化算法只適用于單個優化目標情況下的自動優化,而車用驅動電機領域要求進行多目標優化。為了解決這個問題,可以構造一個綜合優化函數,將多個優化目標加權合成為單個優化目標。然而這種情況下綜合優化函數的選取對最終優化結果有著較大的影響,不同性能要求將使得綜合優化函數中各個優化目標的權重不同,并且無法直觀地觀察到最終優化結果在優化平面上的分布情況。
帕累托算法從另一個角度解決了差分進化算法只能優化單個目標的問題。帕累托算法不再需要構造綜合優化函數來綜合多個優化目標,而是直接在當前優化解集中找出最有希望實現優化目標的一系列個體,以此為當前最優個體進行下一代的優化迭代[11]。
在帕累托算法中,若滿足:
(5)
式中:A,B∈P,為不同的電機優化參數向量,P為參數空間,則稱A支配B。當在參數空間P中,不存在任何優化參數向量A可以支配B,則稱B為非支配解,所有符合條件的非支配解的集合為較優解集,即帕累托最優解集[10]。
帕累托算法通過選取當前優化解集中的帕累托最優解,經過多次迭代的不斷逼近之后,最終獲得的帕累托最優解集將逼近帕累托前沿,即優化平面上優化解集在優化目標方向上的邊沿,如圖1所示。通過帕累托算法實現對帕累托前沿的逼近,確定了在多維優化目標平面上的具體優化方向,較構造綜合優化函數,將多目標問題轉換為單目標問題的方法,也可以減輕不同初始值對于優化結果的影響。
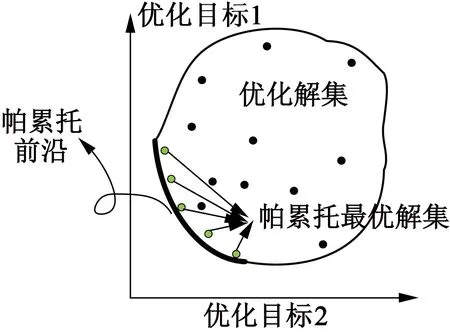
圖1 優化平面上的帕累托最優解集與帕累托前沿
由圖1可以發現,采用帕累托算法之后,可以將所有優化個體畫在以優化目標為坐標軸的坐標系中,能夠通過對比帕累托前沿上的各個帕累托最優解的性能,更加全面直觀地權衡各個方案的優缺點,科學地選取最終采用的最有優化方案。
3 車用驅動電機智能自動優化算法
本文在基于上文介紹的差分進化算法以及帕累托算法的基礎上,改進了傳統差分算法存在容易出現早熟收斂與局部最優點的問題,提出了車用驅動電機智能自動優化算法,實現了對車用驅動電機的多變量、多目標自動優化。
圖2所示為本文的車用驅動電機智能優化算法的流程圖。算法以優化代數為終止條件,當優化結束后,算法將給出所有優化個體在優化目標坐標系中的散點圖,方便直觀地選取帕累托前沿上的最優優化結果。
由于綜合采用了差分進化算法與帕累托算法,第一代種群將由初代種群最優解集突變產生,突變幅值與初代種群離散程度有關,這將導致第一代種群將較初代種群密集于帕累托前沿方向。同理,第二代種群將較第一代種群密集于帕累托前沿方向。然而,帕累托算法目標是擬合優化目標指標范圍內的帕累托前沿,導致種群無法密集于一點,這可以使得優化后期種群多樣性得以保持,優化后期種群將以一定的密集程度不斷擬合,完善優化目標指標范圍內的帕累托前沿。因此,對于不同的優化參數初始值,本文提出的優化算法均能實現對帕累托前沿的收斂。
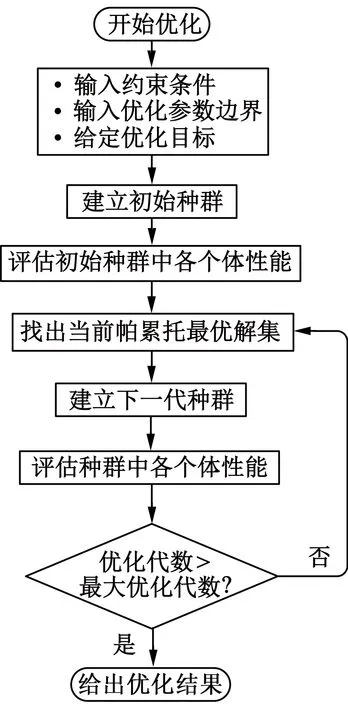
圖2 車用驅動電機智能自動優化算法流程圖
圖3給出了不同于傳統的基于帕累托的差分進化算法,該算法采用了全局最優解保留策略,從而抑制了算法早熟的概率,改善優化性能。圖3中差分變異過程主要由式(6)實現,雜交過程主要由式(7)實現:
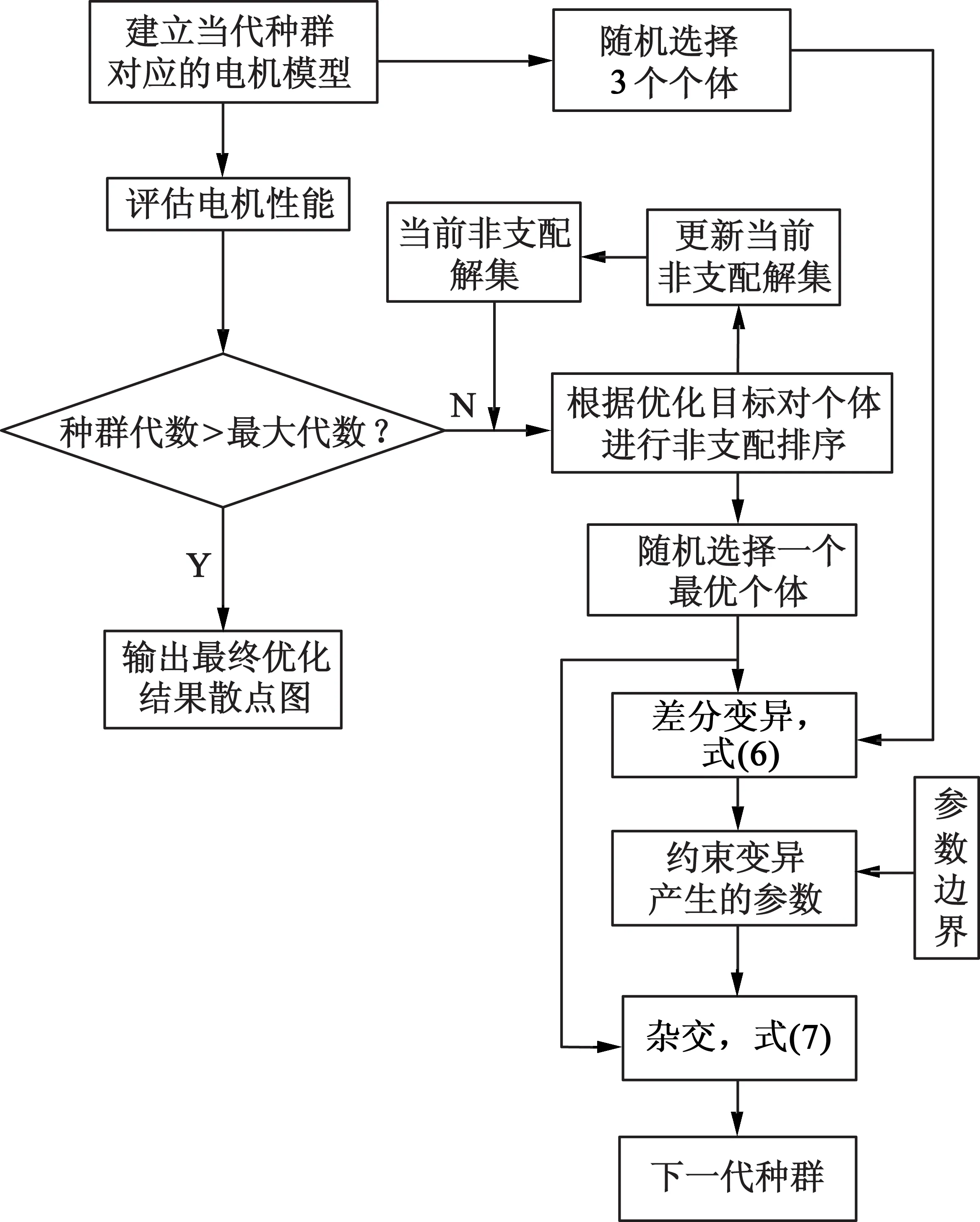
圖3 改進型基于帕累托的差分進化算法流程圖
(6)
(7)

圖4所示為本文自動優化的內嵌式電機的轉子結構圖。
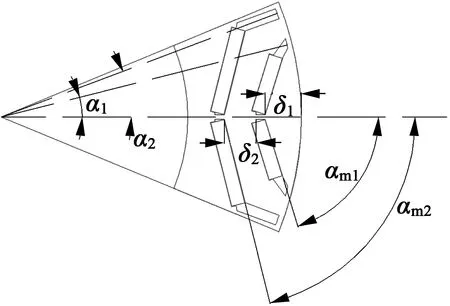
圖4 內嵌永磁電機轉子結構圖
(8)
(9)
表1給出了該電機的優化參數以及其對應的參數邊界。
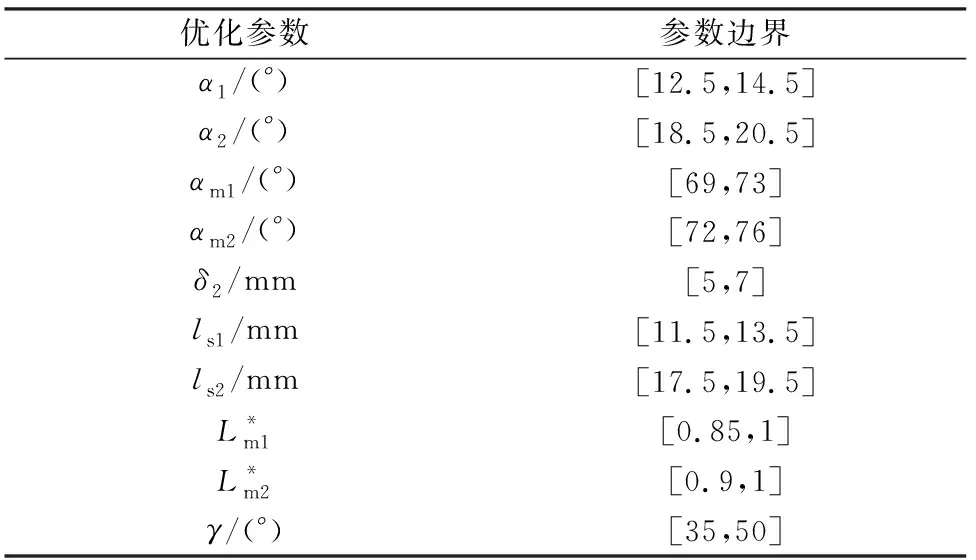
表1 優化參數與對應參數邊界
給定優化目標為峰峰值轉矩波動小于7%,轉矩大于305N·m;同時給定優化約束條件為轉速4 000 r/min時空載反電動勢不大于176 V。此外,規定了若無法同時滿足2個目標,以滿足第一個目標優先,即轉矩波動目標優先。
4 優化結果
圖5為自動優化程序完成優化后給出的優化結果散點圖。從圖5中可以發現,隨著優化的進行,優化解集將不斷逼近、集中于帕累托前沿,并且可以發現,初代個體與第一代個體有著比較強的全局搜索能力,從而能夠確保最終優化結果為全局最優解而不落入局部最優解。第二代個體,第三代個體則更偏向于局部搜索,提高了最終優化解的精度。圖5也給出了優化前后電機性能在性能平面上的分布情況。可以發現,較優化前電機,優化后電機在2個優化目標上,無論是平均轉矩還是轉矩波動,都有較大提升。
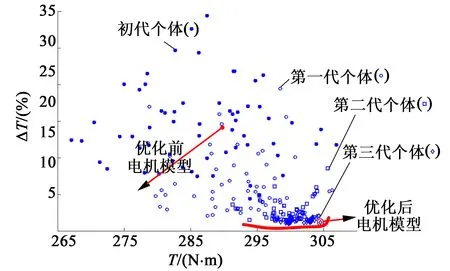
圖5 自動智能優化算法給出的優化結果散點圖
表2給出了優化前后電機優化參數的取值以及各自的電機性能對比。從表2中可以發現,優化后的電機無論在轉矩波動還是平均轉矩輸出上,性能均較優化前電機有大幅提升。其中,轉矩波動降為優化前的37.4%,平均轉矩為優化前的105.5%。同時,優化后電機帶載反電動勢也得到了降低。
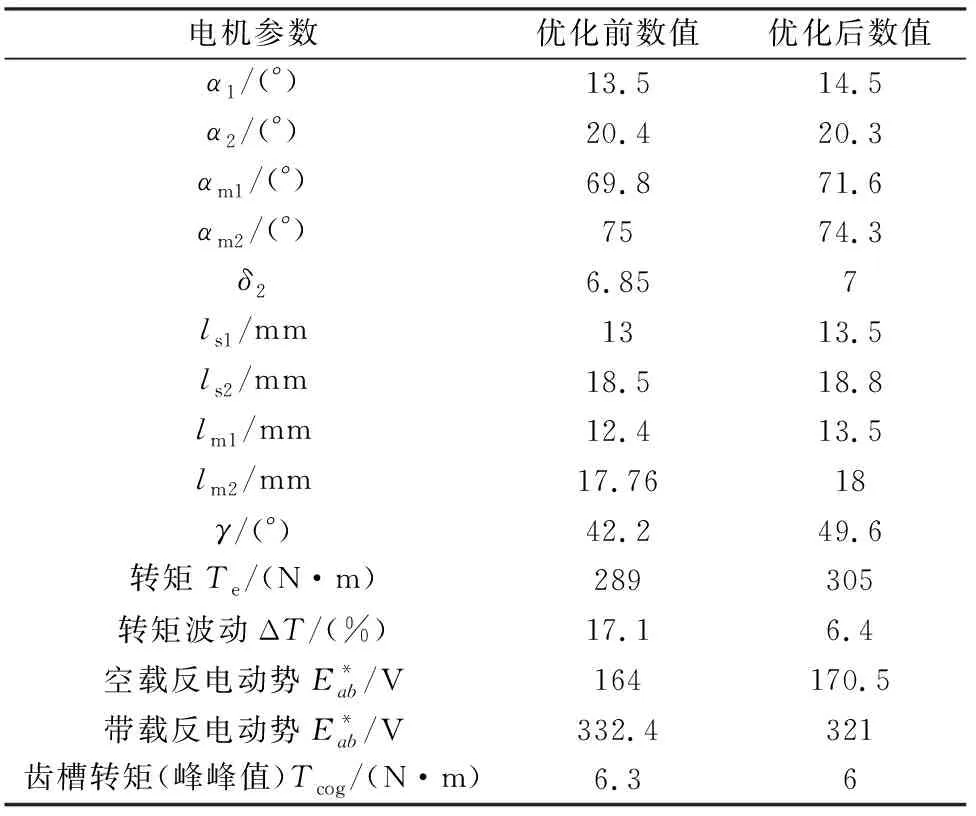
表2 優化前后電機參數與性能對比
注:*表示轉速4 000 r/min。
圖6給出了優化前后電機在峰值轉矩下的磁密云圖,并給出了相同3個點的磁密仿真值。其中,定子齒上的最大磁密由優化前的2.08 T降到了優化后的2.04 T,轉子上的測量點磁密仿真值由優化前的1.946 T降到了1.926 T,可以發現電機磁路磁密飽
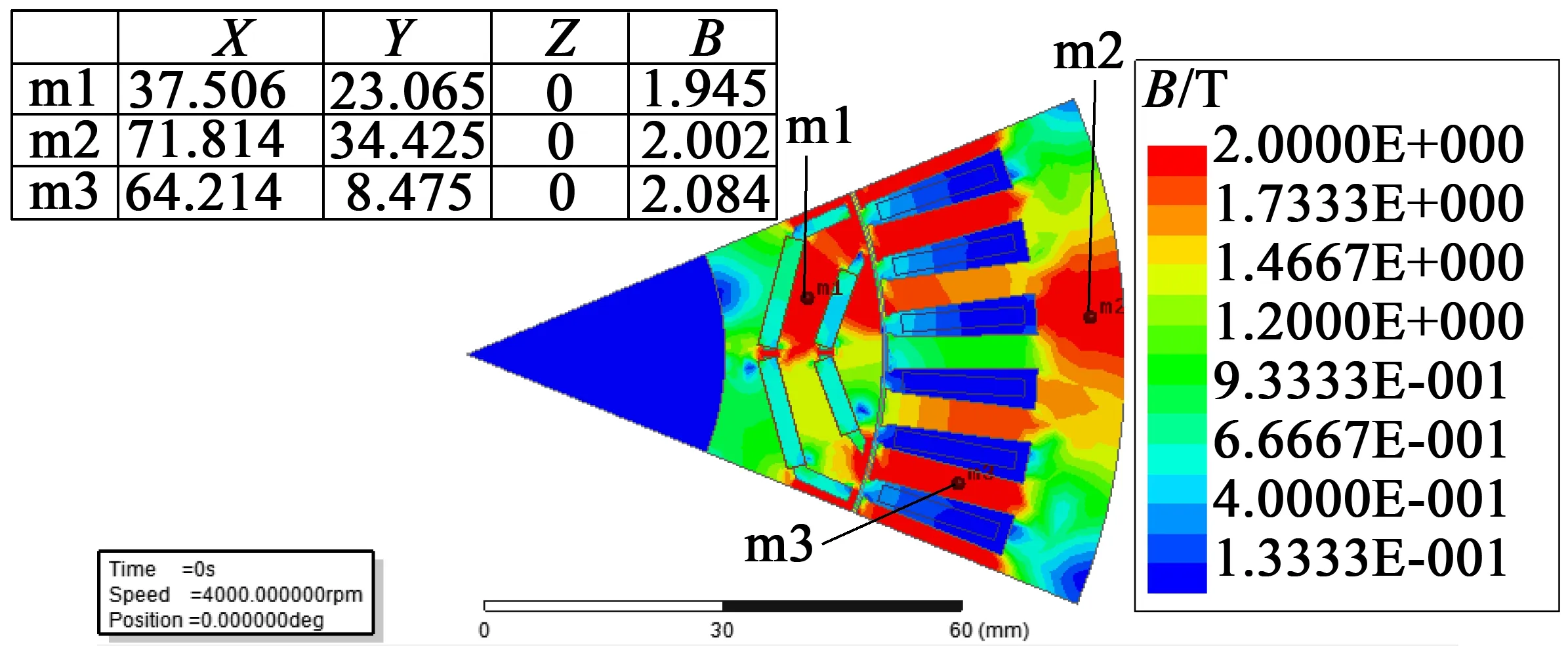
(a) 優化前電機峰值轉矩磁密云圖
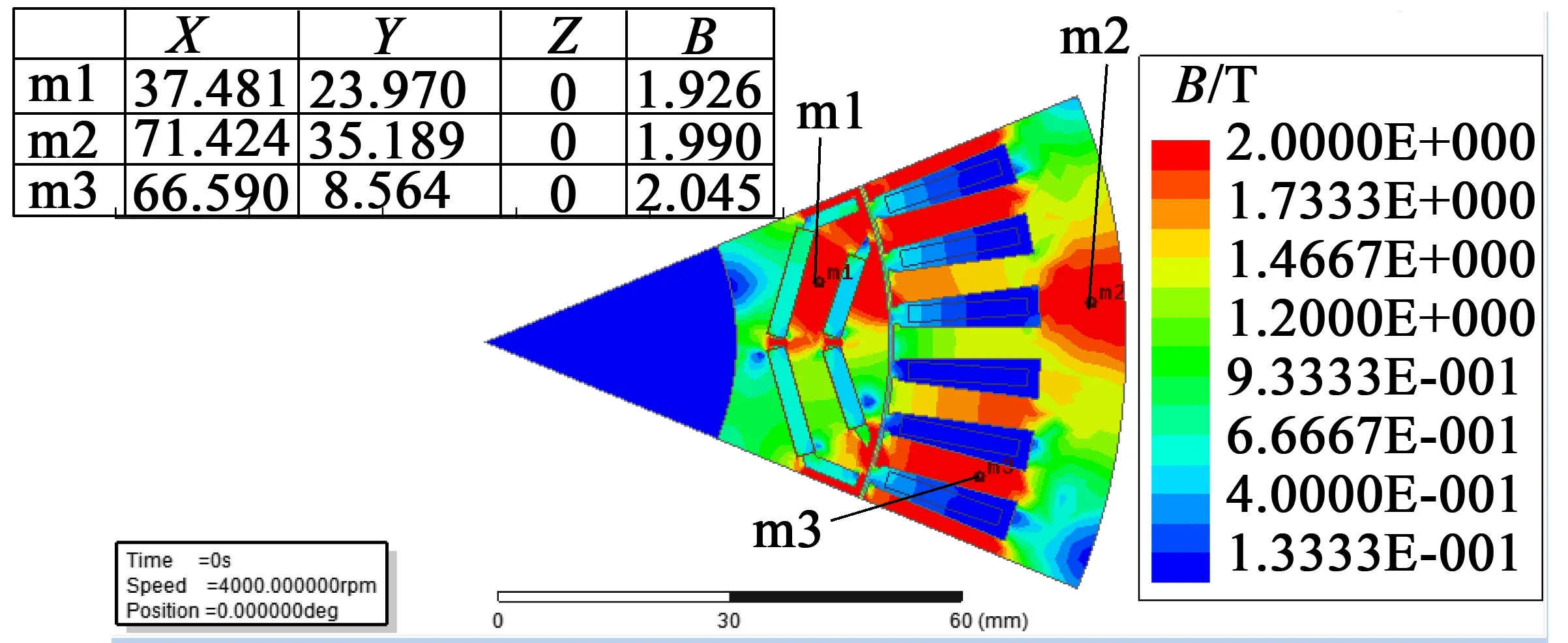
(b) 優化后電機峰值轉矩磁密云圖圖6 優化前后電機峰值轉矩磁密云圖對比
和程度優化后較優化前明顯降低。
5 結 語
本文通過所提出的基于智能算法的車用電機自動優化算法,運用MATLAB與Ansoft聯合仿真,并以轉矩、轉矩波動2個優化目標,10個優化參數為例,實現了對車用驅動電機的自動智能優化。優化時間共耗時1天,大大快于人工根據2個優化目標來手動優化10個優化參數所需的時間。優化結果顯示,本文的自動優化算法擁有較強的全局搜索與局部搜索能力,能夠快速收斂于帕累托前沿。經過優化后的電機在轉矩波動、齒槽轉矩、電機磁路飽和程度等多個方面均優于優化前電機。因此,本文的車用電機自動優化算法具有較好的可行性與高效性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
