基于MSP430和ZigBee的跟日運動控制系統設計
2018-09-05 12:44:54梁雪輝吳正旺
微特電機 2018年8期
許 芬, 梁雪輝,吳正旺
(北方工業大學,北京 100144)
0 引 言
太陽能是一種清潔、豐富的能源。近年來隨著空氣污染的加重,人們對傳統化石能源的環境危害性有了更加切身的體會和更高程度的認識。這種觀念上的改變使市場對清潔能源的需求不斷增長。過去十年里,在政策引導下,中國民間對于光伏發電、光熱發電、風光熱互補發電等新能源發電站的建設呈現出蓬勃的熱情。我國目前是全球光伏發電裝機容量最大的國家。根據國家能源局的統計數據,截至2015年,我國光伏總裝機容量已達到43.18 GW,其中光伏電站裝機 37.12 GW,分布式電站裝機 6.06 GW,年發電 392×108kW·h,占全國發電量的 0.7%。近年來,隨著政府補貼的壓力增大,提高光伏效率、降低光伏度電成本正在成為行業共識,跟蹤式光伏發電開始在國內興起。與光伏發電不同,太陽能熱發電則是采用跟日反光裝置(定日鏡)把太陽光聚集到吸熱器上然后進行發電。“十二五”期間在國家863項目支持下,由中科院電工所牽頭建設的我國第一個兆瓦級太陽能光熱示范電站于2012年8月在延慶八達嶺成功發電。2013年9月,中控公司在青海德令哈建設的10 MW太陽能熱發電站并網發電。2015年,國家能源局提出了到2020年底實現太陽能熱發電總裝機容量達到10 GW,太陽能熱利用集熱面積保有量達到8×108m2的目標,太陽能熱發電開始進入發展熱潮。不管是光伏發電、光熱發電,或者其他太陽能熱利用項目,光利用效率決定了太陽能發電系統的能效,進而決定了太陽能發電系統的單位成本。采用雙軸跟蹤方式的反光鏡可以保證采光面一直接收直射的太陽光,從而提高入射的太陽能量密度,提高系統光熱利用效率。
雙軸跟日運動控制方式主要有方位-俯仰運動方式和自旋-仰角運動方式[1]。方位-俯仰運動方式利用垂直地面的立軸和水平方向的俯仰軸運動改變鏡架的方位角和俯仰角,實現對太陽的跟蹤。自旋-仰角方式通過鏡面的自旋和鏡架的仰角變化改變定日鏡的法線方向實現對太陽的跟蹤。自旋-仰角方式具有弧矢方向和子午方向成像距離始終保持一致的優點,但由于此種運動方式實現起來相對復雜,目前應用并不多。
跟日方式有基于光電傳感器的光控法和基于視日運動軌跡的時控法。時控法是根據天文公式計算出太陽每個時刻在地平坐標系下的精確位置然后調整跟日機械裝置的姿態使之追隨太陽運動。光控法則是利用光電傳感器(光伏電池板,光敏電阻,光電二極管等)檢測太陽的相對位置然后調整機械裝置跟蹤太陽。相比于時控法,光控法容易受到天氣、浮云、飛鳥等外界干擾,而且成本相對較高,所以在實際應用中一直受到限制。
郭鐵錚等研制了基于TMS320F2810的定日鏡跟蹤控制系統[2]。定日鏡運動系統由2臺異步交流伺服電機和減速機組成。控制系統采用開-閉環相結合的模式對定日鏡的運動系統進行控制,即開環控制系統計算出定日鏡高度角和方位角位置,然后根據傳感器對定日鏡姿態進行閉環調節。該跟蹤控制系統跟蹤精度可以達到3.5×10-3rad,但是整個運動控制系統結構比較復雜,成本比較高。北京延慶太陽能熱發電實驗電站采用主從PLC的方式進行定日鏡跟蹤控制。主PLC根據時間和天文公式計算出當前時刻各個位置定日鏡要達到的方位角和高度角,并通過現場總線下發到從PLC,然后通過變頻器和交流伺服電機實現定日鏡的運動控制[3]。劉琨等介紹了一種基于TMS320F2801處理器和光伏電池板的自主供電式小型定日鏡系統設計[4]。西班牙亞塞爾維亞大學與Solucar公司合作研制的MEMS太陽跟蹤器采用太陽光傳感器和Bang Bang控制對定日鏡進行閉環控制。當有直射太陽光時,如果誤差信號幅值大于一個設定閾值,就起動電機轉動;如果誤差信號小于閾值,電機就停轉;當太陽被遮擋時,系統則進入開環模式[5]。
1 太陽位置計算
日地之間的位置參數可以通過數值模擬法或理論展開式法來計算,其中理論展開式法精度更高[9]。本系統采用理論展開式法計算太陽的赤緯角,然后根據太陽赤緯角、跟日系統所在緯度及跟蹤時間求出太陽的方位角和高度角。
太陽赤緯角是地球赤道所在平面與太陽地球中心連線之間的夾角。由于日地相對位置變化,赤緯角每年在+23°27′ 與-23°27′ 的范圍內變化。每年夏至赤緯角達到最大值+23°27′ ,該日中午太陽位于地球北回歸線正上空,隨后赤緯角逐漸減小,至秋分日赤緯角變為0,到了冬至12月21日赤緯角達到最小值-23°27′ 。赤緯角的計算公式如下:
(1)
以地球上一點建立地平坐標系,在此坐標系下,太陽的高度角和方位角可以根據天球赤道坐標系的太陽赤緯角δ和時間角ω來計算:
(2)
式中:hs是太陽的高度角;βs是太陽的方位角;δ是赤緯角;φ是緯度;ω是時間角。
以定日鏡頂點為原點,以天頂為Z軸,建立地平坐標系OXYZ。假設靶標相對于定日鏡中心點的方位角是βt, 高度角是ht,θ是太陽入射角,根據反射定律及夾角余弦公式,可以推導得到定日鏡的法線方位角βn和高度角hn的計算公式[6]。
(3)
2 跟日系統設計
雙軸跟日系統包括水平方向轉動軸和俯仰方向轉動軸,兩轉動軸分別采用步進電動機加齒輪傳動來帶動。定日鏡的框架采用方鋼制成,尺寸為1.5 m×1.5 m,整個架子質量約為30 kg。
為了減小系統成本,控制部分采用單片機MSP430F5438A作為控制器,通過兩相全數字式細分驅動器驅動2臺步進電動機實現定日鏡的方位角和俯仰角調整。根據仿真計算,水平方向的運動范圍小于150°,俯仰方向的運動范圍小于50°。圖1是自動跟日鏡架的三維機械模型圖。

圖1 跟日反射系統CAD模型
2.1 控制系統總體方案
為了兼顧可靠性和自動性,雙軸跟日控制系統采用獨立自動控制加網絡監控的方案。控制節點內置自動跟日程序,可以按照程序設定每日自動跟蹤太陽運動。該節點同時具有ZigBee通信模塊,可以通過無線傳感網絡和遠程的云服務器相聯。應用工程師或普通用戶可以通過遠程智能終端(比如智能手機)對控制節點進行訪問,完成參數設置,或者進行時間修正、姿態校準、系統復位等操作。整個控制系統由3部分構成,分別是跟日控制節點、支持ZigBee的互聯網網關和云服務器上的網絡服務程序,系統架構如圖2所示。
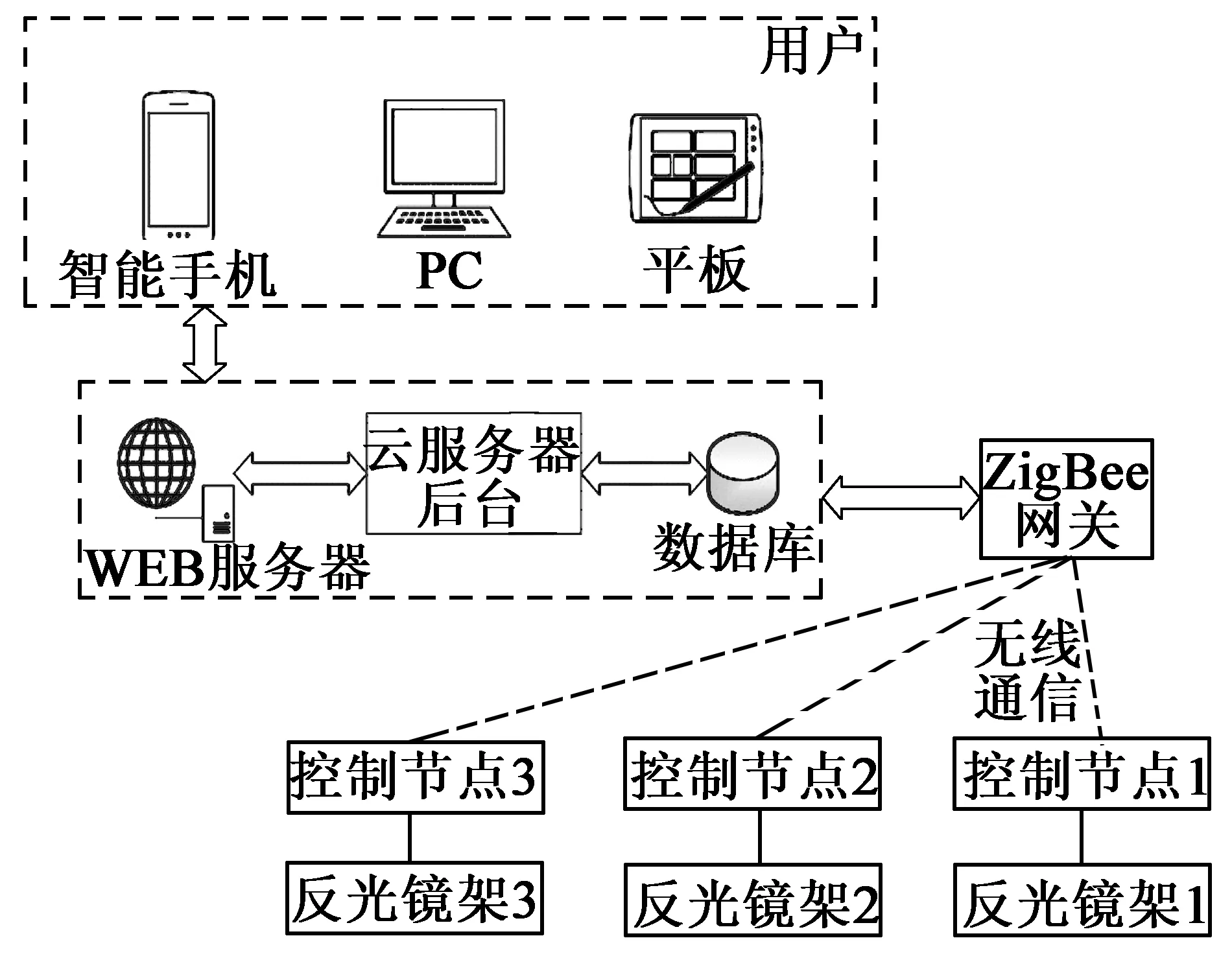
圖2 控制系統總體設計
2.2 步進電動機選型
從方便控制和降低成本的角度出發,系統選用了兩相混合式步進電動機。跟日運動系統的水平運動方向阻尼較大,需要較高的輸出力矩。86步進電動機的輸出保持力矩為根據力矩估算,選用86步進電動機加100倍比的齒輪傳動系統來帶動。俯仰方向的阻尼和力臂較小,采用57電機加一個50倍比的齒輪傳動系統進行運動。2臺步進電動機均可以采用微步距方式進行控制,其中最小細分步數可以達到51 200步,對應的角度為0.007°。
2.3 控制節點設計
具有ZigBee通信能力的控制節點完成對跟日反光鏡架的跟蹤控制任務。控制節點采用型號為MSP430F5438A的處理器,包括單片機最小系統,ZigBee無線通信模塊,步進電動機接口電路,限位開關接口電路,供電電路等,如圖3所示。
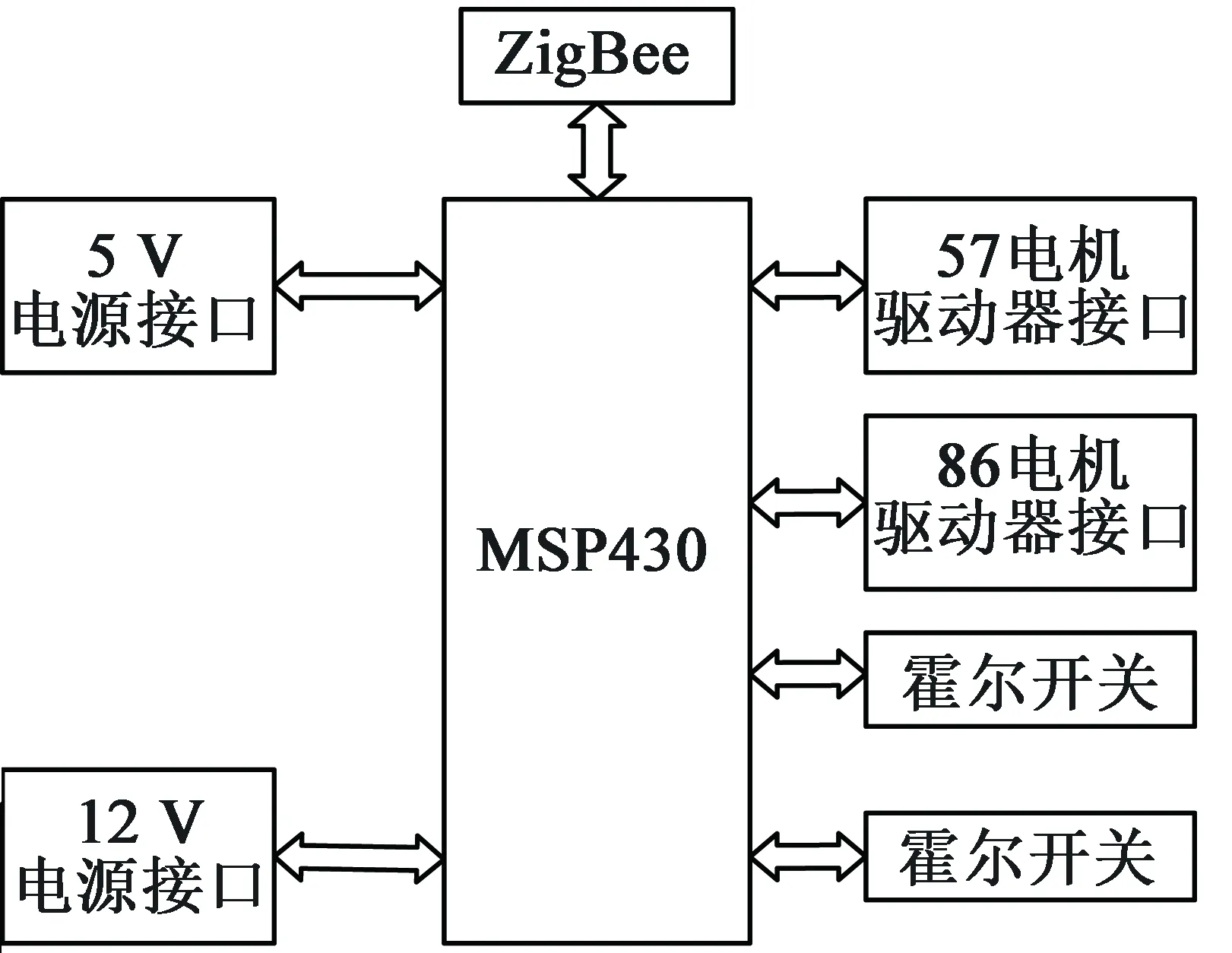
圖3 控制節點設計
2.3.1 單片機系統
主處理器是16位單片機MSP430F5438A。 MSP430F5438的系統主時鐘為25 MHz。片內包含256 kB FLASH,16 kB SRAM,還帶有4個串口,4個SPI,4個定時器,一個12位A/D轉換器,一個RTC實時時鐘,及多達87個I/O口。MSP430的供電電壓是3.3 V。為了方便程序BLS燒寫,主控板擴展了一個USB接口,通過USB芯片CH340T,實現從USB輸入到串口的轉換。
2.3.2 電機驅動電路
跟日系統的2個軸都用步進電動機帶動。選用的驅動器為帶有細分功能的兩相混合式步進電動機數字驅動器,微步細分最大可以達到51 200步/轉。單片機向驅動器輸出一定頻率的脈沖,由驅動器來控制電機的使能、轉動方向和控制脈沖。電機驅動器采取共陽接線法,用74HT04D芯片進行電平轉換。
2.3.3 霍爾開關接口電路
選用歐姆龍的霍爾開關TL-Q5MC1-Z 作為2個運動軸的限位開關。當2個運動軸達到限定位置時,霍爾開關輸出變為低電平,根據霍爾開關的輸出信號,單片機停止電機運行,并把轉動軸的當前位置作為初始角度位置。霍爾開關的供電電壓和輸出信號都是12 V,需要把12 V轉換為5 V以便與單片機接口。接口板采用了LM317穩壓芯片搭配片外電阻來實現電壓轉換。
2.3.4 供電電路
本文的運動控制系統涉及2臺步進電動機的控制,采用的驅動器供電電壓范圍為DC 24~40 V,最大工作電流為6 A。由于不需要進行軌跡控制,所以2個運動軸一般不同時運動。另外用于限位的霍爾開關采用12 V直流供電,單片機5 V供電。系統選用24 V,350 W開關電源給電機驅動器供電,開關電源輸出的電壓通過一個12 V的穩壓管和一個5 V的穩壓管再輸出12 V電壓和5 V電壓,分別給霍爾開關和單片機電路供電。
3 軟件設計
整個跟日運動控制系統軟件包括3個部分:嵌入式控制器節點程序,ZigBee網關程序,云服務器上的WEB服務器程序及網頁界面設計。系統的軟件框架如圖4所示。
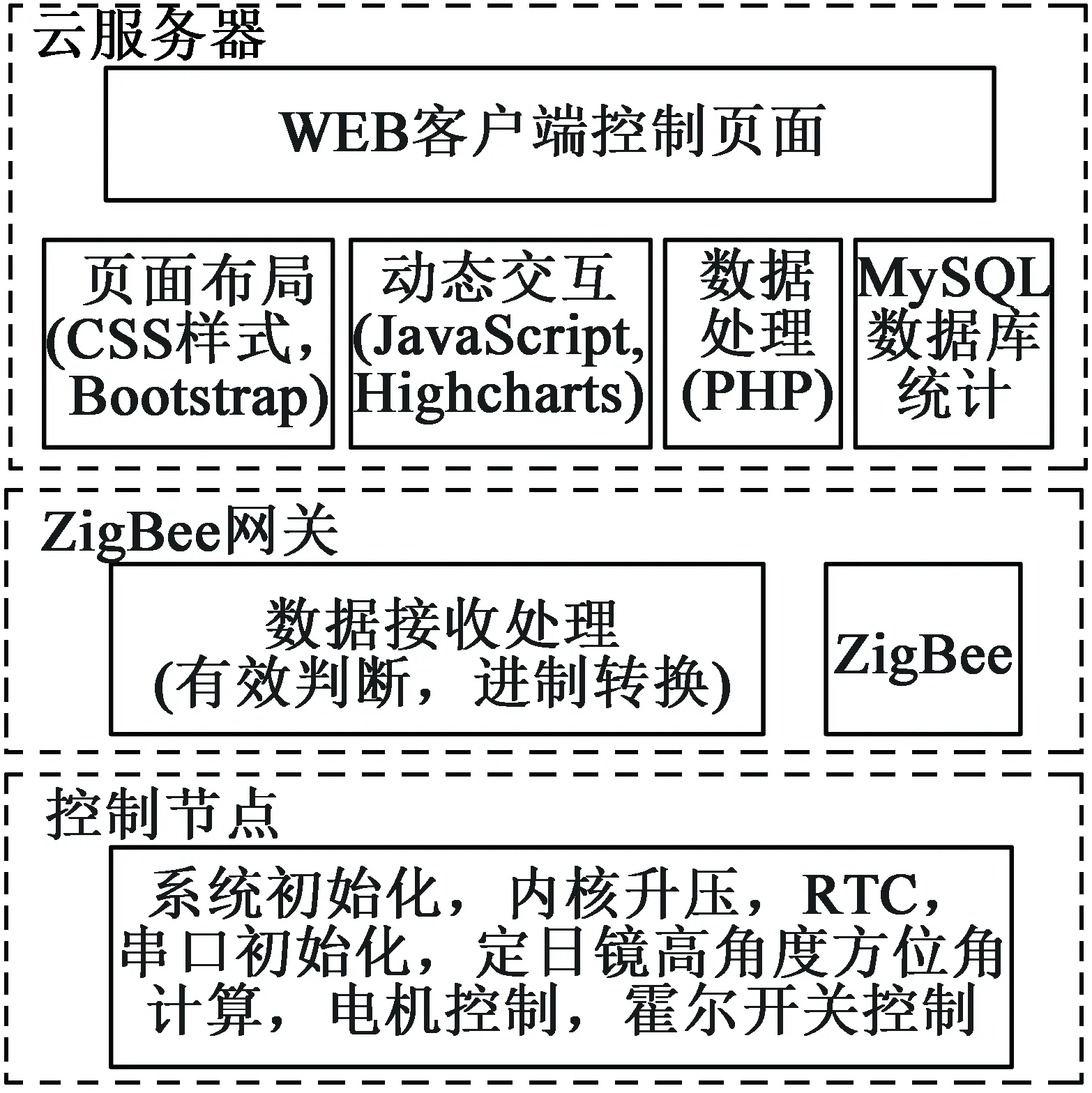
圖4 系統軟件框圖
控制器采用MSP430F5438A作為處理器,并嵌有ZigBee通信模塊,可以看成是ZigBee網絡的一個控制節點。控制節點程序的主要功能包括單片機的初始化、事件管理、太陽跟蹤算法、時間管理、跟日系統校準、步進電動機控制、數據通信等。ZigBee網關程序主要包括ZigBee網絡與云服務器之間的數據傳遞、數據轉換、數據處理、ZigBee節點之間通信等。云服務器上的軟件則包括Web服務器、數據庫、數據庫應用管理程序和動態網頁界面程序。
3.1 控制節點程序
控制節點的軟件包括單片機資源管理、時間管理、跟日位置計算、跟日系統校準、霍爾開關狀態檢測、步進電動機控制等模塊。
控制節點主程序流程圖,如圖5所示。
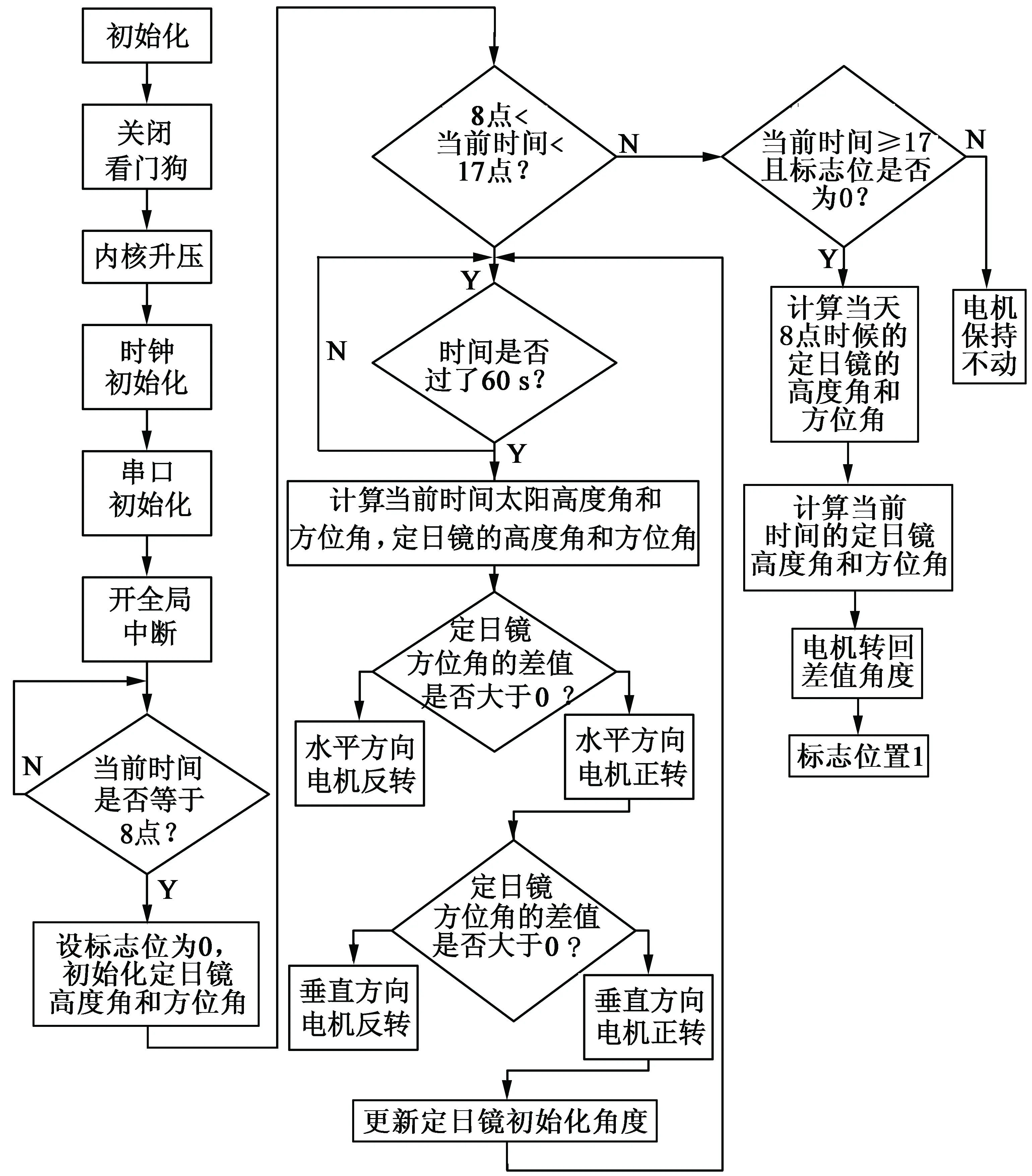
圖5 控制節點主程序流程圖
單片機上電之后,通過中斷程序對系統的實時時鐘和跟日反射裝置的經緯度進行設置。在WEB客戶端上通過互聯網獲取當前時間,同時讀入當前跟日反射裝置的經緯度,目標靶位的高度角和方位角等[7]。用戶輸入數據按照一定格式保存到數據庫的表格里。ZigBee網關從數據庫中獲取數據并判斷數據是否有效,如果有效則把數據轉為16進制發送給控制節點,然后控制節點根據這些參數進行計算,利用式(2)計算出當前時間太陽的高度角和方位角[7],并根據式(3)計算出跟日反射裝置的目標姿態角,通過PWM輸出控制步進電動機轉動,使反光鏡姿態達到目標角度,把太陽光線反射到指定的靶標位置。考慮到太陽的移動比較慢,跟日運動系統的控制周期設置為60 s,即每隔60 s調整一次定日鏡的姿態角度。跟日系統的默認工作模式是早上8點自動進入跟蹤模式,下午5點結束跟蹤回到初始零位。回到初始零位后,控制節點進入低功耗工作模式,即睡眠狀態。由于系統具有ZigBee無線通信功能,而且與云服務器相聯,跟日系統也可以根據本地天氣情況對工作模式及工作時間進行智能控制,比如當天氣預報有雨時,系統不進行跟蹤,或有大風預警時,則自動停止跟蹤回到零位狀態。此外,在自動跟蹤過程中如果反光鏡的跟日誤差增大,可以調用校準程序對跟日系統的姿態角進行修正,減小跟蹤誤差。
3.2 網絡控制程序
除了自動跟蹤模式外,系統也允許用戶通過WEB進行網絡控制。網絡控制程序通過串口中斷來實現。當控制節點的串口接收到數據后自動進入中斷,然后根據接收到的數據對電機進行控制,從而達到網絡控制定日鏡角度的目的。中斷響應程序流程如圖6所示。
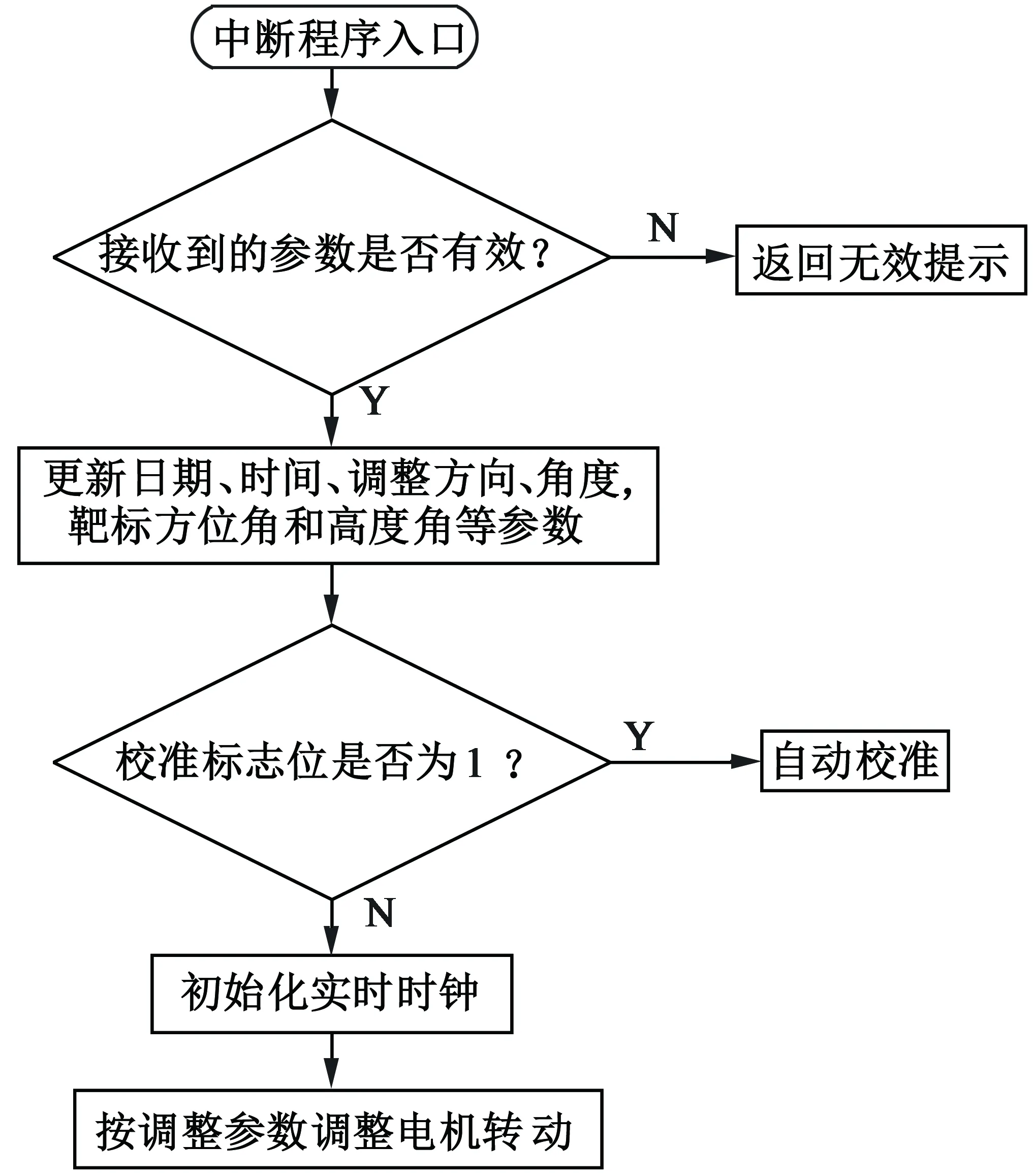
圖6 中斷響應程序流程圖
控制節點的串口通信波特率設為2 400 bit/s,每10 ms發送1 Byte,共22 Byte[7]。數據發送格式如表1所示。
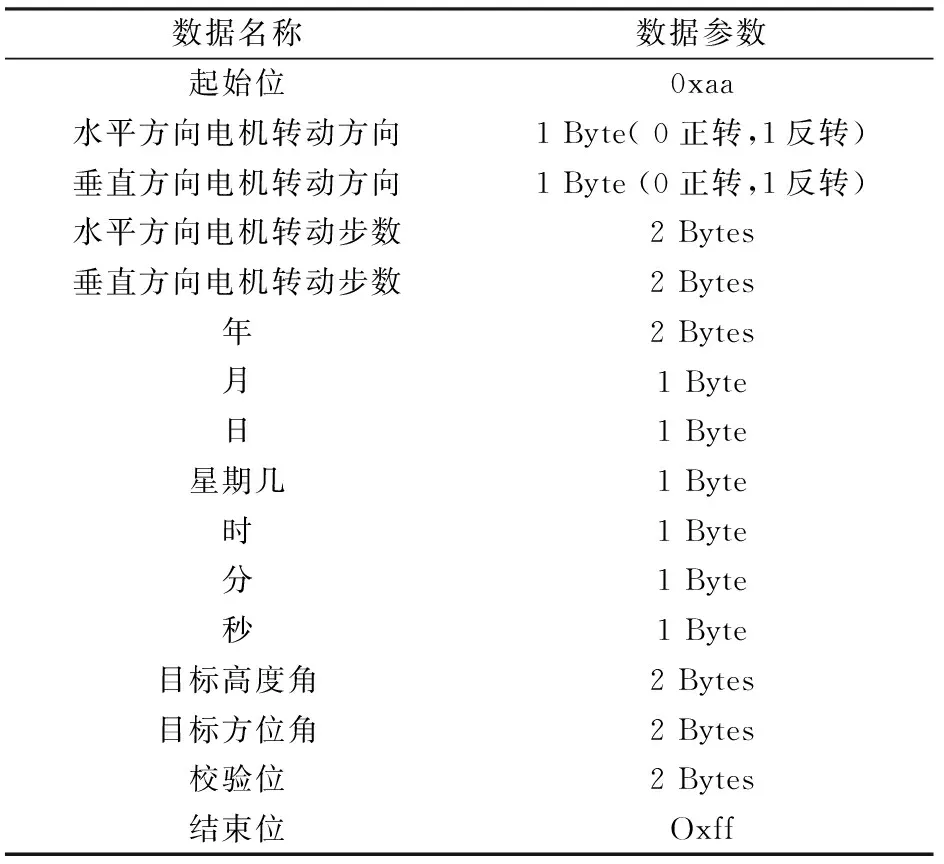
表1 串口數據發送格式[7]
3.3 ZigBee通信
無線通信采用CC2530+ZigBee協議棧實現。ZigBee通信協議目前已成為無線傳感網絡應用中的事實標準。ZigBee室外通信距離可以達到1 km以上。控制節點和ZigBee網關節點,通過ZigBee進行通信。ZigBee網關節點與云服務器之間采用TCP/IP協議進行數據傳輸。云服務器上安裝了MySQL數據庫以及相應的數據庫管理程序,并向節點開放遠程訪問接口。ZigBee網關節點連接遠程數據庫,將WEB客戶端的輸入數據從數據庫中提取出來,進行轉換,再利用Python中的PySerial模塊將數據通過串口轉ZigBee模塊發送給跟日控制節點,完成WEB客戶端對定日鏡的遠程控制。
4 實驗和運行
為了實現遠程控制,我們在騰訊云上申請了服務器賬號,包含1 GB的內存和8 GB的硬盤,1 Mbps的互聯網帶寬。在服務器上搭建了相應的程序。服務器端安裝了Python, MySQL,PHP,Apache,Ubuntu Server 等程序。
ZigBee網關節點采用Python語言開發,用到MySQL的db,serial,time和binascii 4個模塊,這4個模塊的功能是數據庫查詢,串口通信,延時和二進制及ASCII碼轉換。
步進電動機細分6 400步/圈,0.056 3度/步,脈沖輸出頻率可以根據控制要求進行設置。自動跟蹤時的脈沖輸出頻率為66 kHz,在復位和校準時,脈沖輸出頻率提高到500 kHz。由于采用時控法,時間精度對太陽位置計算影響很大。采用網絡控制,每次輸入的時間都來自經過校準的互聯網時間,時間精度得到保證。
控制節點及跟日反光鏡如圖7所示。
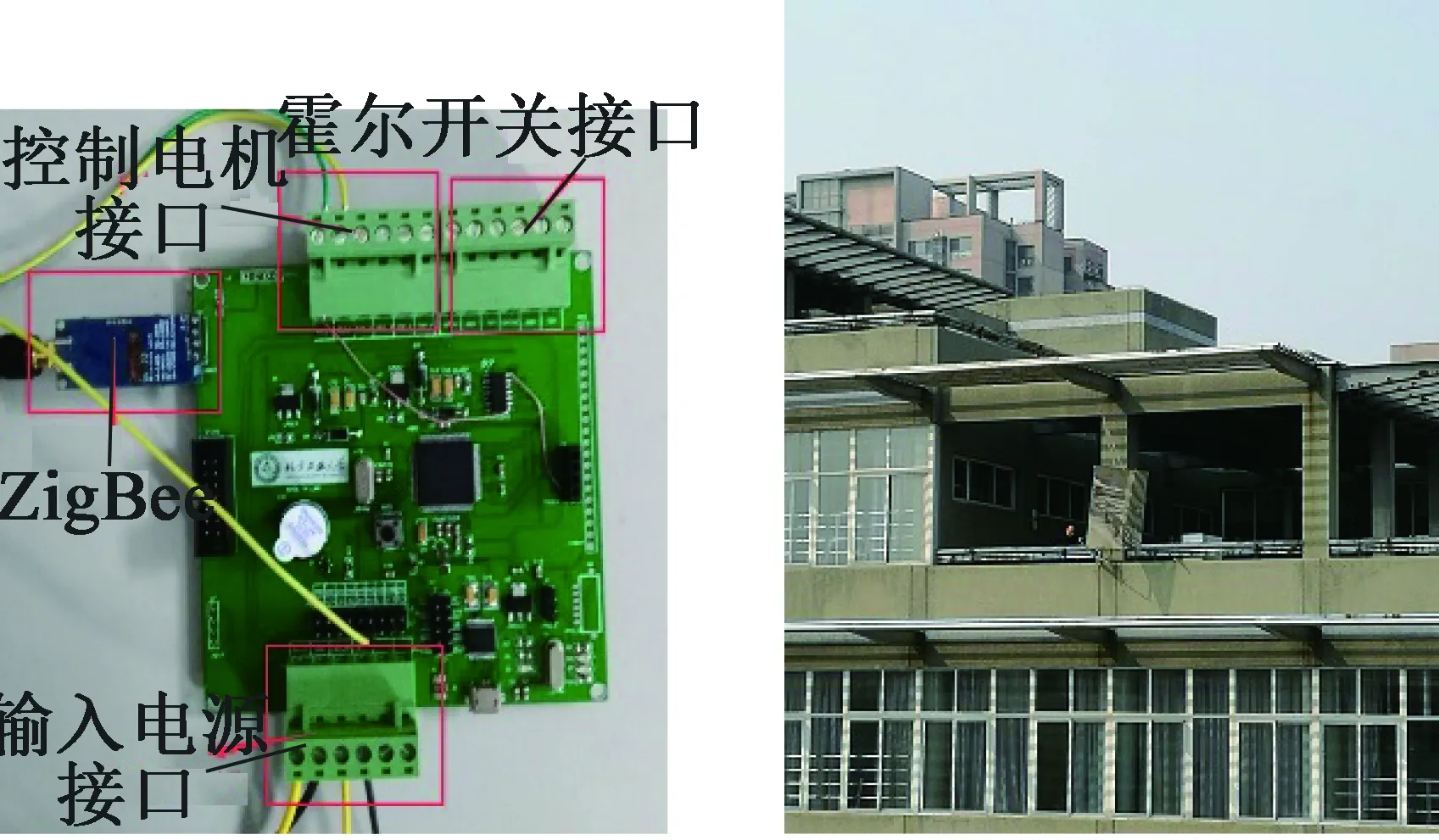
(a) 控制節點 (b) 跟日鏡圖7 控制節點和跟日鏡
跟日裝置安裝在校園內一個教學樓的五層陽臺上,自動跟蹤系統把太陽光反射到對面一座教學樓的一個北向房間的窗戶上,如圖8所示,以改善居室內的采光和溫度狀況。
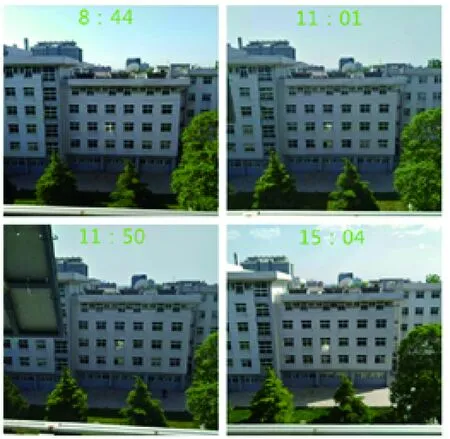
圖8 定日鏡跟日反射光斑
在實際應用中,也可以根據天氣狀況對定日鏡進行自動起停和保護控制。在網絡管理應用程序中通過調用天氣網站對外開放的API接口,可以獲得更多天文與環境信息,比如溫度、濕度、風力、風速、空氣質量(CO,CO2,PM10和PM2.5)等情況,然后在應用程序中設定跟日系統,可以自動跟蹤天氣條件,如果天氣達不到要求條件時,反光鏡回到原位并停止跟蹤。
5 結 語
隨著綠色、可持續發展理念的推廣,可再生能源的應用正在變得越來越廣泛。太陽能作為自然界賦予人類的一種豐富的綠色能源,已經在太陽能發電、海水淡化、建筑取暖、交通動力、照明、爐灶等多個領域取得應用。智能反光裝置根據太陽位置自動調整姿態并把太陽光反射進入背陽的陰面房間,達到改善居室采光及提高溫度的目的。當用戶不需要太陽光照明時,可以通過手機登陸云服務器關閉系統,或者讓跟日系統把太陽光反射到其他位置,符合節能和綠色發展的理念。本文基于單片機和步進電動機的跟日運動控制系統,結合了ZigBee和網絡遠程控制技術,具有成本低、應用方便的優點,可以應用于分布式光伏發電、太陽能熱發電、太陽能照明、太陽能爐灶等領域,具有較好的推廣應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
