無刷直流電動(dòng)機(jī)無位置傳感器閉環(huán)控制研究
2018-09-05 12:44:58張勁恒
微特電機(jī) 2018年8期
張勁恒,楊 揚(yáng)
(南昌理工學(xué)院,南昌 330044)
0 引 言
無刷直流電動(dòng)機(jī)具有結(jié)構(gòu)本身相對(duì)簡單、控制系統(tǒng)設(shè)計(jì)方便、運(yùn)行穩(wěn)定、維護(hù)成本低、功率密度高、調(diào)速性好等優(yōu)點(diǎn),已經(jīng)在伺服控制、精密電子、辦公自動(dòng)化、醫(yī)療器械、家用電器、電動(dòng)車輛、航天航空、工業(yè)工控等行業(yè)內(nèi)得到了廣泛的應(yīng)用[1-8]。傳統(tǒng)的無刷直流電動(dòng)機(jī)需要安裝位置傳感器,從而得到轉(zhuǎn)子位置信號(hào)對(duì)三相繞組進(jìn)行換相控制。然而位置傳感器的安裝不但增加了系統(tǒng)自身的尺寸,使內(nèi)部結(jié)構(gòu)變得復(fù)雜,同時(shí)增加了成本,特別在高溫、高濕等惡劣的工作環(huán)境下,傳感器信號(hào)線容易受外界信號(hào)干擾,系統(tǒng)可靠性降低。因此,無刷直流電動(dòng)機(jī)無位置傳感器閉環(huán)控制是目前研究的熱點(diǎn),并成為控制系統(tǒng)的一個(gè)重要發(fā)展方向。
迄今為止,國內(nèi)外學(xué)者對(duì)無刷直流電動(dòng)機(jī)的無位置傳感器控制技術(shù)展開了大量的研究,其控制技術(shù)主要包含反電動(dòng)勢法、三次諧波法、續(xù)流二極管法、磁鏈法、電感法[9]、狀態(tài)觀測器法[10]、端電壓法[11]以及智能控制策略[15-17]等。文獻(xiàn)[1]采用三次諧波檢測轉(zhuǎn)子位置,提出了基于軟件實(shí)現(xiàn)數(shù)字鎖相功能,并且對(duì)換相時(shí)刻進(jìn)行估計(jì), 去除了傳統(tǒng)的硬件積分方法。這種方法受濾波器性能影響較大,由于信號(hào)采集及數(shù)字濾波的延時(shí)會(huì)造成切換點(diǎn)時(shí)刻估計(jì)偏差。在參考文獻(xiàn)中,反電動(dòng)勢法是實(shí)際應(yīng)用中一種較為常用的檢測方法,該方法基于測量三相繞組端電壓, 實(shí)時(shí)檢測三相繞組反電動(dòng)勢的過零點(diǎn)時(shí)刻,從而得到離散的換相信號(hào)。文獻(xiàn)[2]基于三相繞組斷開相的端電壓與變流器直流母線中間點(diǎn)電壓之間的關(guān)系,檢測到三相繞組的反電動(dòng)勢過零點(diǎn)時(shí)刻,從而得到轉(zhuǎn)子位置旋轉(zhuǎn)信息。該方法對(duì)于全壓型及上、下橋臂PWM調(diào)制策略適用,對(duì)于H_PMW_L_ON,H_ON_L_PWM,開通相PWM保持相恒通,開通相恒通保持相PWM不適用。文獻(xiàn)[14] 基于擴(kuò)展卡爾曼濾波原理對(duì)三相繞組的反電動(dòng)勢進(jìn)行相應(yīng)檢測,該方法運(yùn)算相對(duì)復(fù)雜,對(duì)控制系統(tǒng)運(yùn)算速度提出了較高的要求,提升了控制系統(tǒng)的成本。
本文首先系統(tǒng)闡述了無刷直流電動(dòng)機(jī)的基本原理和工作特性,比較分析了無刷直流電動(dòng)機(jī)不同控制策略下的數(shù)學(xué)模型及拓?fù)浣Y(jié)構(gòu),研究了一種基于逆變器直流環(huán)中點(diǎn)電壓為參考點(diǎn),利用線電壓來實(shí)時(shí)計(jì)算相反電動(dòng)勢的轉(zhuǎn)子位置辨識(shí)方法。基于此方法,采用預(yù)定位-外同步-自同步三段式起動(dòng),實(shí)現(xiàn)無刷直流電動(dòng)機(jī)無位置傳感器閉環(huán)穩(wěn)定控制,并對(duì)控制策略進(jìn)行仿真,從而驗(yàn)證理論分析的正確性。
1 無刷直流電動(dòng)機(jī)電路拓?fù)浼皵?shù)學(xué)模型
三相全橋式無刷直流電動(dòng)機(jī)主電路拓?fù)浣Y(jié)構(gòu)框圖如圖1所示。其三相繞組為Y型接法,假設(shè)三相繞組的反電動(dòng)勢波形為梯形波,三相繞組的電流波形為方波。為了達(dá)到最大的電磁轉(zhuǎn)矩輸出目的,三相繞組的電流需要與對(duì)應(yīng)自身相的繞組反電動(dòng)勢保持相位一致。變流器采用120°兩兩導(dǎo)通的控制方式,開關(guān)器件每60°電角度更換一次,一個(gè)周期內(nèi)需要6次換相信號(hào)。反電動(dòng)勢及電流波形如圖 2所示,三相繞組的反電動(dòng)勢過零點(diǎn)都領(lǐng)先對(duì)應(yīng)相繞組的換相信號(hào)30°電角度。

圖1 無刷直流電動(dòng)機(jī)驅(qū)動(dòng)電路拓?fù)湓韴D

圖2 反電動(dòng)勢、電流波形
假設(shè)無刷直流電動(dòng)機(jī)的繞組是三相對(duì)稱的,并忽略電機(jī)的齒槽效應(yīng)和電樞反應(yīng),氣隙磁場空間分布為梯形波,三相繞組的電壓方程式可以表示:
(1)
式中:uaN,ubN,ucN分別為三相繞組的相電壓;R為每相繞組的電阻;ia,ib,ic分別為每相繞組的電流;ψa,ψb,ψc分別為三相繞組的磁鏈。
式(1)中,三相繞組的磁鏈表達(dá)式如下:
(2)
式中:ψar,ψbr,ψcr分別為永磁體在三相繞組感應(yīng)產(chǎn)生的磁鏈;M為三相繞組之間的互感;L為三相繞組自身的電感。
因假設(shè)繞組是三相對(duì)稱的,所以三相繞組的電流存在如下關(guān)系:
ia+ib+ic=0
(3)
將式(3)代入式(2)得:
(4)
將式(4)代入式(1)得:
(5)

(6)
以直流母線中點(diǎn)m的電勢為參考點(diǎn),因此電機(jī)三相繞組電壓的數(shù)學(xué)模型如下:
(7)
式中,uam,ubm,ucm為定子a相,b相,c相繞組相對(duì)直流環(huán)中點(diǎn)的電壓;uNm為電機(jī)中性點(diǎn)對(duì)直流環(huán)中點(diǎn)的電壓。
電機(jī)輸出的電磁有功功率:
Pe=eaia+ebib+ecic
(8)
電機(jī)輸出的電磁轉(zhuǎn)矩:
(9)
式中:ωr為轉(zhuǎn)子機(jī)械角速度。
2 無刷直流電動(dòng)機(jī)相反電動(dòng)勢檢測方法
本文研究了一種新的反電動(dòng)勢檢測方法,該方法以逆變器直流環(huán)中點(diǎn)電壓為參考點(diǎn),利用線電壓來實(shí)時(shí)計(jì)算相反電動(dòng)勢的轉(zhuǎn)子位置進(jìn)行辨識(shí)。此方法不需要構(gòu)造電機(jī)中點(diǎn)或虛擬中性點(diǎn),通過直接檢測無刷直流電動(dòng)機(jī)三相繞組與直流環(huán)中點(diǎn)之間的電壓,經(jīng)過軟件實(shí)時(shí)計(jì)算,可以得到三相繞組反電動(dòng)勢過零點(diǎn)時(shí)刻,進(jìn)而可以得到每個(gè)周期內(nèi)6個(gè)換相時(shí)刻切換點(diǎn)。
基于三相相繞組電壓表達(dá)式(7),通過兩兩相減可以得到三相線電壓表達(dá)式如下:
(10)
為了進(jìn)一步推導(dǎo)相感應(yīng)電動(dòng)勢與線電壓之間的關(guān)系,將其中兩相線電壓進(jìn)一步進(jìn)行相減,以u(píng)bc,uca兩相為例說明如下:
(ea+eb-2ec)
(11)
假設(shè)處于a相,b相導(dǎo)通,c相不導(dǎo)通時(shí)刻,ea+eb=0,電機(jī)三相電流之和ia+ib+ic=0,則式(11)可以簡化:
(12)
又由于上面假設(shè)為c相不導(dǎo)通時(shí)刻,所以ic=0,對(duì)式(12)進(jìn)一步簡化得:
(13)
通過式(13)可以看出,在c相不導(dǎo)通時(shí)刻,其反電動(dòng)勢只與線電壓有關(guān)系。同理可得ea,eb兩相在不導(dǎo)通時(shí)刻非換相期間的表達(dá)式如下:
(14)
因此可以根據(jù)檢測線電壓值,就可以得到三相繞組反電動(dòng)勢過零點(diǎn)時(shí)刻,進(jìn)而可以確定每個(gè)周期內(nèi)6個(gè)換相時(shí)刻切換點(diǎn)。
3 基于線電壓計(jì)算相反電動(dòng)勢仿真驗(yàn)證
下面分別給出基于斷開相繞組端與直流中點(diǎn)之間電壓、線電壓來實(shí)時(shí)計(jì)算的相反電動(dòng)勢、繞組電流仿真波形,以a相為例。圖3為不同調(diào)制方式下的仿真波形圖,圖3(a)為上、下橋臂PWM調(diào)制策略,圖3(b)為全壓型調(diào)制策略,圖3(c)為H_PMW_L_ON調(diào)制策略,圖3(d)為H_ON_L_PWM調(diào)制策略,圖3(e)為開通相PWM保持相恒通調(diào)制策略,圖3(f)為開通相恒通保持相PWM調(diào)制策略。從仿真結(jié)果中可以看出,圖3(a)的上、下橋臂PWM調(diào)制及圖3(b)的全壓型調(diào)制策略的斷開相繞組端與直流中點(diǎn)之間電壓存在明顯的過零點(diǎn),可以用于換相信號(hào)控制;其它4種調(diào)制策略的斷開相繞組端與直流中點(diǎn)之間電壓并不是連續(xù)波形,是一種斷變式電壓波形,在軟件或硬件中較難處理,如果基于低通濾波又會(huì)產(chǎn)生較大相位延時(shí)。然而在這6種不同的調(diào)制策略中,基于式(13)、式(14)由線電壓來實(shí)時(shí)計(jì)算的相反電動(dòng)勢在斷開相繞組存在連續(xù)的過零點(diǎn),便于換相信號(hào)控制。

(a) 上、下橋臂PWM調(diào)制

(b) 全壓型調(diào)制

(c) H_PMW_L_ON調(diào)制

(d) H_ON_L_PMW調(diào)制

(e) 開通相PWM保持相恒通

(f) 開通相恒通保持相PWM圖3 相電流、端電壓及相反電動(dòng)勢波形
4 無刷直流電動(dòng)機(jī)閉環(huán)控制策略系統(tǒng)仿真
要實(shí)現(xiàn)無刷直流電動(dòng)機(jī)閉環(huán)控制策略,首先需要解決電機(jī)穩(wěn)定起動(dòng),目前現(xiàn)有的研究文獻(xiàn)通常采用三段式閉環(huán)起動(dòng)方法。三段式閉環(huán)起動(dòng)方法主要分3個(gè)過程:第一階段為轉(zhuǎn)子預(yù)定位控制;第二階段為V/f恒定比同步加速控制;第三階段為自同步運(yùn)轉(zhuǎn)閉環(huán)控制。本文同樣采用三段式起動(dòng)策略。系統(tǒng)中電機(jī)參數(shù)定子電阻R=11.9 Ω,定子繞組自感L=2.07mH,定子繞組互感M=0.69mH,當(dāng)速度為1 000 r/min時(shí),電機(jī)空載時(shí)永磁產(chǎn)生的線電壓峰值VPK=32.3 V,電機(jī)極數(shù)p=4,電機(jī)轉(zhuǎn)動(dòng)慣量J=0.000 031 kg·m2,直流母線電壓udc=100 V,導(dǎo)通方式為兩兩120°導(dǎo)通。
轉(zhuǎn)子預(yù)定位采用b相上管、a和c相下管同時(shí)導(dǎo)通,持續(xù)時(shí)間為0.1 s,轉(zhuǎn)子受力產(chǎn)生旋轉(zhuǎn),將使轉(zhuǎn)子磁場軸線與b相繞組中心軸對(duì)齊。外同步加速原理是電機(jī)定子繞組頻率fs從零以400 Hz/s的增加梯度上升,同步角頻率ωs積分得到同步電角度θ,每個(gè)周期開關(guān)切換時(shí)刻根據(jù)電角度θ確定,具體切換時(shí)刻如圖4所示,這個(gè)區(qū)間持續(xù)時(shí)間為0.2 s。

圖4 外同步加速開環(huán)切換時(shí)刻
自同步運(yùn)轉(zhuǎn)基于本文前面提出的基于逆變器直流環(huán)中點(diǎn)電壓為參考點(diǎn),利用線電壓來實(shí)時(shí)計(jì)算相反電動(dòng)勢的轉(zhuǎn)子位置辨識(shí)方法得到切換時(shí)刻,這個(gè)區(qū)間仿真時(shí)間為0.2 s,系統(tǒng)整個(gè)仿真時(shí)長為0.5 s。圖5為H_PMW_L_ON調(diào)制策略無刷直流電動(dòng)機(jī)無位置傳感器起動(dòng)及閉環(huán)控制系統(tǒng)仿真結(jié)果。

(a) 電機(jī)轉(zhuǎn)速、三相 電流波形

(b) 圖5(a)水平坐標(biāo)X軸 方向局部放大圖

(c) 電壓uam,a相繞組 反電動(dòng)勢ea波形

(d) 圖5(c)水平坐標(biāo)X軸 方向局部放大圖
(e) 電機(jī)a相實(shí)際霍爾信號(hào)S1, 估算換相信號(hào)S2,a相繞組電流波形圖5 H_PMW_L_ON調(diào)制策略閉環(huán)控制仿真
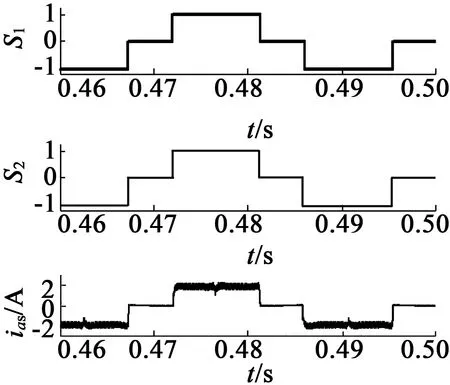
圖6為開通相PWM保持相恒通調(diào)制策略無刷直流電動(dòng)機(jī)無位置傳感器起動(dòng)及閉環(huán)控制系統(tǒng)仿真結(jié)果。
從仿真波形中可以看出,從外同步加速切換到自同步運(yùn)轉(zhuǎn)相對(duì)平滑,沒有出現(xiàn)電流明顯過沖現(xiàn)象,說明本文采用預(yù)定位-外同步-自同步三段式起動(dòng)方法可以實(shí)現(xiàn)無刷直流電動(dòng)機(jī)無位置傳感器穩(wěn)定起動(dòng)。利用線電壓來實(shí)時(shí)計(jì)算相反電動(dòng)勢的轉(zhuǎn)子位置辨識(shí)方法估算的換相信號(hào)與實(shí)際霍爾信號(hào)幾乎完全一致,驗(yàn)證了本文研究的繞組反電動(dòng)勢檢測方法的正確性。由于本文只給出了H_PMW_L_ON、開通相PWM保持相恒通調(diào)制策略的仿真波形,其余4種調(diào)制同樣可以實(shí)現(xiàn)穩(wěn)定起動(dòng)及閉環(huán)控制,結(jié)果相類似。

(a) 電機(jī)轉(zhuǎn)速、三相 電流波形

(b) 圖6(a)水平坐標(biāo)X軸 方向局部放大圖
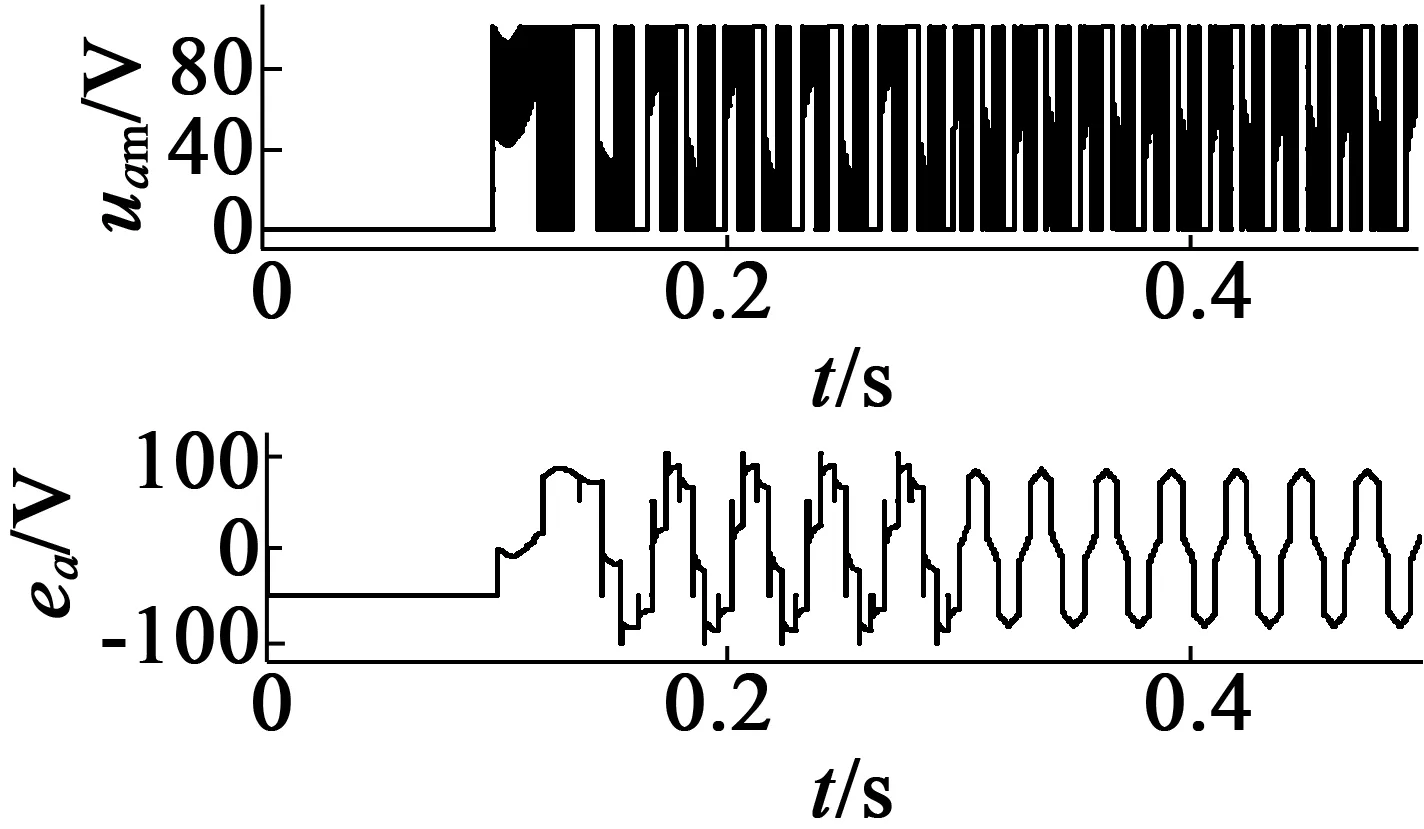
(c) 電壓uam,a相繞組 反電動(dòng)勢ea波形

(d) 圖6(c)水平坐標(biāo)X軸 方向局部放大圖

(e) 電機(jī)a相實(shí)際霍爾信號(hào)S1, 估算換相信號(hào)S2,a相繞組電流波形圖6 開通相PWM保持相恒通調(diào)制策略閉環(huán)控制仿真
5 結(jié) 語
本文研究了一種基于逆變器直流環(huán)中點(diǎn)電壓為參考點(diǎn),利用線電壓來實(shí)時(shí)計(jì)算相反電動(dòng)勢的轉(zhuǎn)子位置辨識(shí)方法,給出了全壓型及5種PWM調(diào)制模式下的相電壓反電動(dòng)勢波形。起動(dòng)過程采用預(yù)定位-外同步-自同步三段式起動(dòng)方法,可以實(shí)現(xiàn)無刷直流電動(dòng)機(jī)無位置傳感器穩(wěn)定閉環(huán)起動(dòng),外同步加速切換到自同步運(yùn)轉(zhuǎn)過程相對(duì)平穩(wěn),沒有出現(xiàn)電流振蕩,仿真波形驗(yàn)證了無位置傳感器閉環(huán)控制系統(tǒng)的可行性及有效性。
