麥克納姆輪驅動的移動機器人自適應滑模控制器設計
2018-09-07 10:30:02王明明朱瑩瑩張磊王璐衛宣伯方靜
西北工業大學學報 2018年4期
王明明, 朱瑩瑩, 張磊, 王璐, 衛宣伯, 方靜
(1.西北工業大學航天學院,陜西西安710072; 2.西北工業大學深圳研究院,廣州深圳518057; 3.武警特警指揮學院,北京102202)
移動機器人在復雜地形探測、戰場偵查、地質勘探、倉儲物流等方面具有重要的應用前景,其控制器的設計水平是保證任務成功的關鍵[1]。機器人控制器的設計開始向著應用于復雜環境,且能抵抗外部干擾的方向發展。由于能全向移動且轉彎半徑為零,基于全向輪的移動機器人受到了廣泛關注,并且被應用于多種場景,如倉庫搬運機器人、全向輪椅等。全向移動機器人中,麥克納姆輪驅動的全向移動機器人受到越來越多的關注[2-3]。
由于麥克納姆輪驅動的全向移動機器人存在諸多優勢,使其在工業界和學術界得到越來越多的關注,諸多學者對其運動學建模和動力學建模展開了研究[3]。Muir等[4]對此類機器人進行了運動學建模,從運動學方式上,給出了基于麥克納姆輪的全向機器人運動學公式。Tlale等[5-6]為此類機器人建立了動力學模型并從動力學角度對基于麥克納姆輪的全向機器人展開分析。盡管此類機器人的運動學和動力學模型發展較為成熟,針對應用于實際環境的移動機器人軌跡跟蹤控制研究仍然方興未艾。
由于4個麥克納姆輪分別由4個直流電機驅動,針對此類機器人如何設計多驅動電機的協調控制器成為至關重要的問題。實際工程應用中,電機選型多選用帶有速度伺服系統的電機,由于電機的速度伺服系統多采用PID控制,因此伺服控制系統會對整個系統帶來更多的不確定性;此外機器人所運行的環境也具有諸多不確定性,因此控制器的魯棒性和自適應性就顯得至關重要。Shimada等[7]提出了一種基于位置誤差的控制方法,并研制了實驗裝置,對所提出的方法進行了實驗驗證。Wang等[8]在不考慮擾動的情況下,提出了一種用于軌跡規劃的滑動模態控制器,Viet等[9]考慮了有擾動的情況,在外加擾動的情況下針對全向移動機器人設計了滑模控制器,其研究結果表明滑模控制器能有效抑制外部干擾。Fierro等[10]針對全向移動機器人的軌跡規劃設計了一種神經網絡控制器。另外,Xu等[11]針對全向移動機器人設計了一種基于神經網絡的魯棒滑模控制器。基于神經網絡的控制器具有控制精度高等優點,但需要大量學習,因此具體實現上存在不便。以上控制器存在參數難以整定的問題,如何設計一種高效的自適應控制器是解決此問題的關鍵。Wang等[12]針對移動機器人的軌跡規劃設計了一種自適應控制器,并證明了其穩定性。Sira-Ramirez等[13]設計了一種能夠快速收斂的自適應控制器,以應對直流電機的不確定性。
綜上所述,本文的研究對象具有確定的運動學模型,適合采用基于模型的控制方法。常見的基于模型的控制方法有:LQR控制方法[14]以及結合LQR控制方法優點與卡爾曼濾波器的控制方法LQG控制[15],然而LQR控制雖然具有良好的魯棒性,但其計算復雜且對模型精確度要求過高。而LQG控制魯棒性較差,并且該類方法多用于線性系統控制器設計。通過對移動機器人的運動學建模可知,基于麥克納姆輪的全向移動機器人是一類多輸入多輸出(MIMO)的非線性系統,而滑動模態控制[16]是一種針對不確定條件且具有魯棒性的非線性控制器。因此本文提出基于滑模控制的自適應魯棒軌跡跟蹤控制器。滑模控制器的常見問題為控制器輸出的抖振問題,馬廣富等[17]提出了一種多冪次滑模趨近律,能夠顯著減小抖振,并且通過仿真進行了驗證,但其不具有自適應性。為使系統具有更高的魯棒性,本文設計了一種比例-微分-積分形式的滑模面來提高系統的魯棒性,并且提出了一種多冪次趨近律來提高系統的動態性能,最后為避免參數整定的麻煩操作,本文設計了自適應律以提高系統的自適應性,借此可以解決上述問題。
1 運動學模型
麥克納姆輪是一種在輪表面存在一些滾子(如圖1所示)。
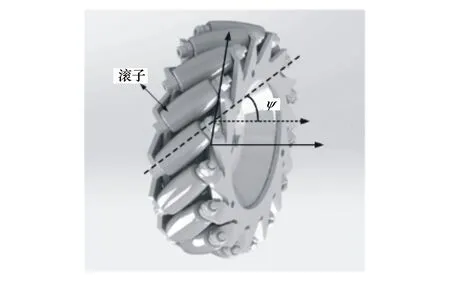
圖1 麥克納姆輪
這些滾子的轉軸方向與整個輪的轉軸方向呈45°夾角,每個麥克納姆輪由一個獨立的直流電機驅動,通過調節4只電機的不同轉速,即可實現全向的移動,比如橫向和縱向移動,傾斜移動和零轉彎角度轉動(如圖2所示)。
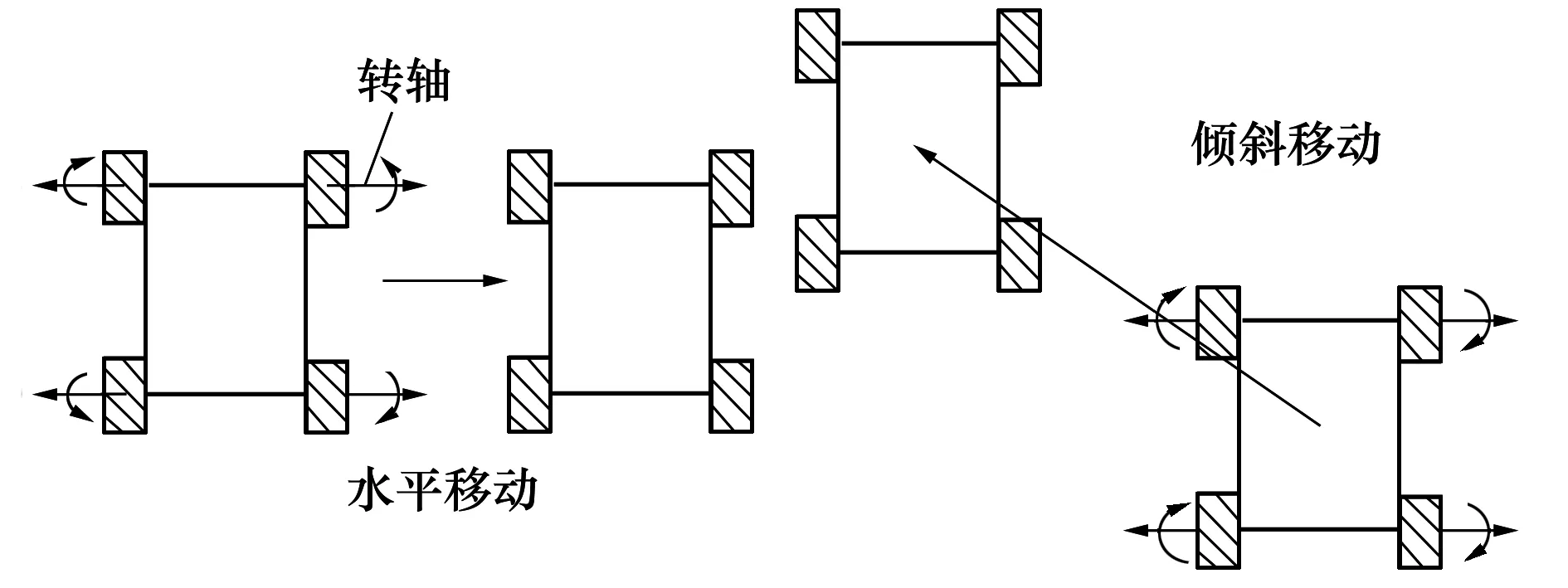
圖2 帶麥克納姆輪的移動機器人運動演示
對麥克納姆輪驅動的全向移動機器人進行運動學建模,首先要建立相關的坐標系(如圖3所示),Oixiyi為慣性坐標系(inertial coordinate system),Obxbyb為連體坐標系(body-fixed coordinate system),其原點Ob為車體的幾何中心,其y軸始終指向車體縱軸,x軸與y軸垂直并組成右手坐標系,Owixwiywi為第i只輪子的輪系坐標系,其原點位于麥克納姆輪的幾何中心,x軸與驅動電機輸出軸平行,y軸與x軸垂直并組成右手坐標系。規定車體右前方的輪子為1號輪,順序按逆時針排序。
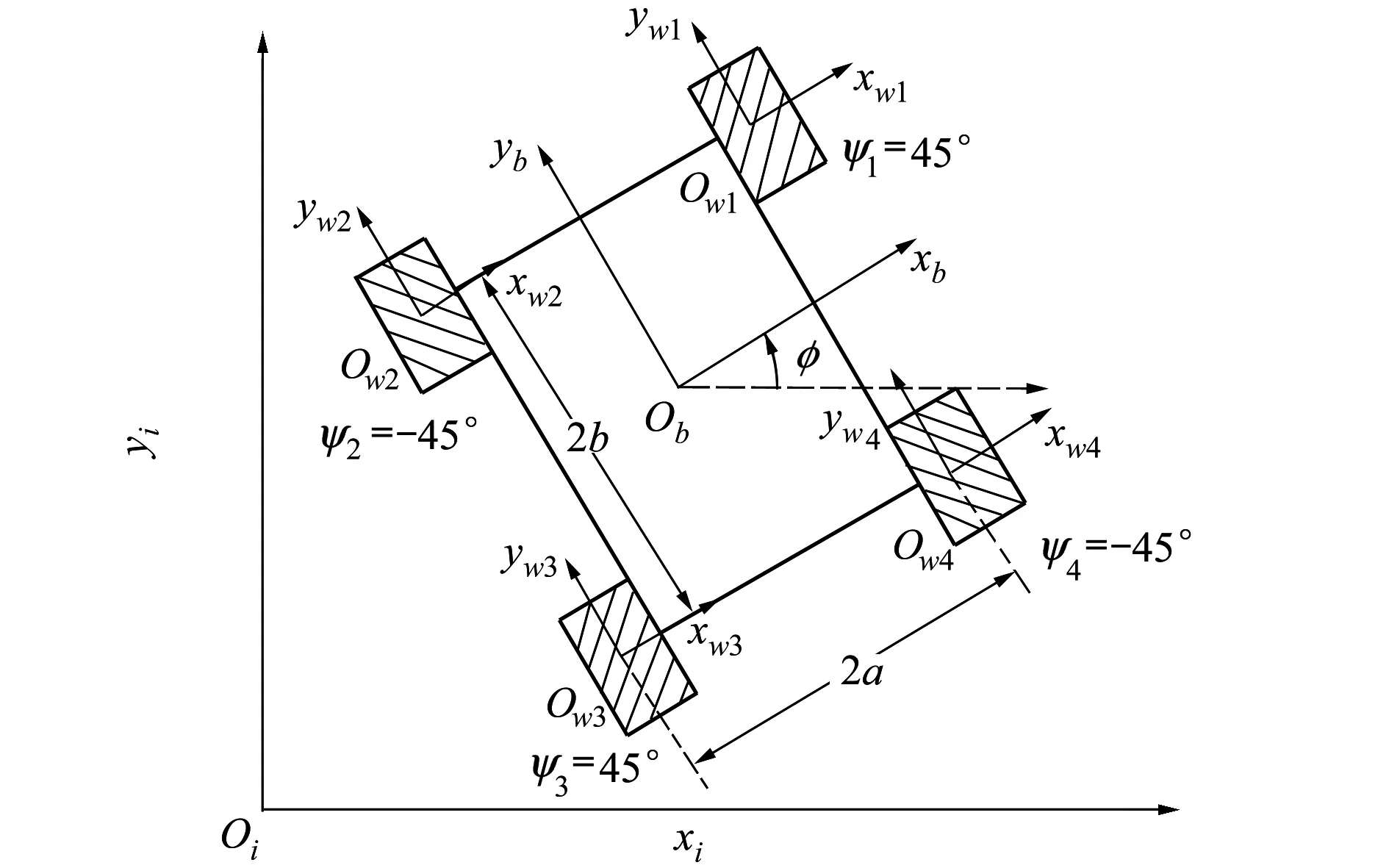
圖3 移動機器人坐標系
如圖1所示,定義麥克納姆輪滾子的轉軸與Owixwiywi的x軸所呈夾角為ψ,定義第i只輪Owixwiywi位置矢量pwi(i=1,2,3,4)=[xwi,ywi,zwi]T,ωix為第i只輪的角速度,ωiy為第i只輪上的滾子角速度,ωiz為麥克納姆輪繞過Owi且垂直于Owixwiywi平面轉軸的角速度。Ri(i=1,2,3,4)為第i只輪子的半徑,ri為滾子半徑,輪系坐標系中輪子的速度矢量可以表示為:
(1)
根據旋轉矩陣,可以獲得如(2)式所示的速度計算公式:
(2)

對雅可比矩陣分析可以得出如下結論:
1) 當且僅當ψi=0時,|Ji|=0。所以對于麥克納姆輪來說,此時雅可比矩陣是奇異的。
2) 值得注意的是,rank(Ji)=3,所以每個輪子具有3個自由度。
(3)
通過(2)式和(3)式,移動機器人的微分運動學公式可以描述如下:
(4)
式中,ωi(i=1,2,3,4)是第i只輪的轉速,單位為rad/s。通過運動學公式不難發現,基于麥克納姆輪的移動機器人可以實現真正的全向移動。
閉環控制的反饋為靜止坐標系下的位姿信息。進一步地,根據旋轉矩陣,可得到連體坐標系下的速度Obxbyb和慣性坐標系下的速度Oixiyi的轉換關系為:
(5)
2 自適應滑模控制器設計
2.1 滑模面設計
滑模控制器設計的第一個任務就是設計滑模面,在控制系統工作的過程中,保證系統始終工作在滑模面s(t)=0上。
(6)
(7)
2.2 趨近律設計
在滑模控制器中,常用的趨近律有:等速趨近律、指數趨近律、冪次趨近律、一般趨近律[12,18]。其中冪次趨近律具有較好的收斂速度,更進一步地,為了保證較高的收斂速度,并且盡量減小控制器的抖振問題,本文設計一種多冪次滑模趨近律以達到控制目標,并通過仿真驗證其在系統動態響應過程中具有快速的收斂速度。本文選用的多冪次滑模趨近律如下:
(8)
式中
(9)
符號函數sgn( )的引入會使系統的工作過程出現振蕩。因此,為了減小符號函數對系統的影響,本文對趨近律進行如下改進,引入飽和函數,可有效削弱趨近律在滑模面附近的跳變,以改善抖振問題:
(10)
式中,δi為正小量:
(11)
穩定性證明如下:首先選取李雅普諾夫函數
當且僅當si(t)=0,(i=1,2,3)時等號成立,故該系統是李雅普諾夫穩定的。
2.3 自適應律設計

σi|si(t)|βsi(t),(i=1,2,3)
(14)
自適應律設計如下:
(15)
穩定性證明如下:如(13)式所示已經證明了李雅普諾夫函數V1的穩定性,現取李雅普諾夫函數如下:
(16)

(17)
將公式(15)代入上式,可得:
(18)
穩定性得證。
對公式(6)兩端同時求導,可以得到:
(19)
結合(14)式可以得到:
(20)
進一步可以得到控制信號:
(21)
結合公式(4)和公式(5),可以得到各個輪的轉速:
(22)
3 仿真驗證與分析
3.1 設計流程
圖4展示了本文所提控制器的設計流程。首先對機器人的運動學進行建模,此后為保證對此類非線性耦合系統能夠提供優越的控制性能,本文設計以滑模控制器為基礎;為了提高控制器的魯棒性,選取了比例-積分-微分形式的滑模面;為保證系統的動態性能,選取了適當的趨近律;為了避免整定參數,同時使系統具有更好的自適應性,設計了一種自適應律。然后針對所設計的控制器在仿真中加入擾動并與PID控制的普通滑模控制(SMC)的效果進行了對比,最后通過實驗驗證的方式展示了本文所設計控制器的實用性。
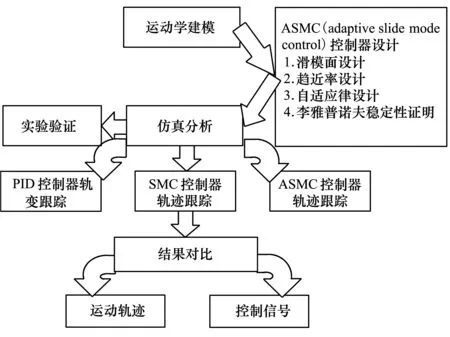
圖4 設計流程圖
3.2 仿真驗證
為驗證本文所提的自適應滑動模態控制器的魯棒性和動態性能,首先設計了一條軌跡,通過對標稱軌跡的跟蹤控制,并且在其中加入了脈沖擾動,與傳統PID控制器和無自適應性的SMC控制器進行對比驗證,分析本文所設計控制器的性能。本文測試使用的標稱軌跡可表示如下:
?t≥0
[xiyiφi]T=[0 m -0.2 m 0 m]T為系統的初始位置。同時,為了驗證系統的動態性能和魯棒性,實驗中加入了擾動,在x軸和y軸方向分別加入幅值為0.1 m,頻率為0.4 rad/s的正弦信號,同時在10 s和30 s分別加入幅值為0.1 m和-0.2 m的階躍信號。仿真測試的系數設置如下:
對于SMC控制器和ASMC控制器:



表1 控制消耗時間
為了更加直觀地分析3種控制器的控制效果,對x軸和y軸方向的偏差進行統計分析,如圖7和圖8所示。
通過圖7和圖8可以明顯地看出,ASMC控制器雖然在控制的開始階段,系統的誤差要大于其他兩種控制器,但是隨著時間的推移,ASMC控制器的控制效果逐漸改良,并取得了優于其他2種控制器的控制效果。滑模控制器的最大問題在于控制信號的抖振,前文中已經提到,多冪次趨近律的引入可以明顯的改善系統抖振,為驗證其效果,參見圖9和圖10。

圖5 軌跡跟蹤 圖6 局部放大圖7 x軸偏差
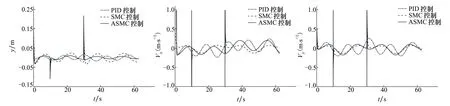
圖8 y軸偏差 圖9 x軸速度圖10 y軸速度
為準確分析各控制器性能,本文取x軸坐標誤差和y軸坐標誤差的均值作為控制器的控制效果,取x軸速度和y軸速度的輸出反映控制器的抖振情況統計結果見表格2和表格3。
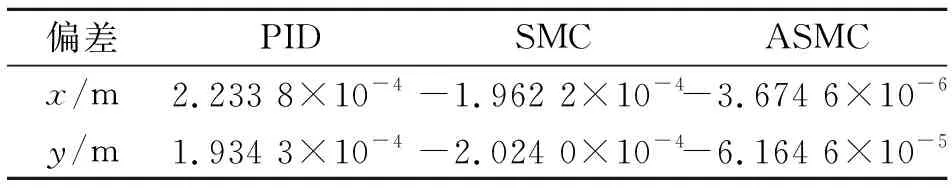
表2 偏差平均值
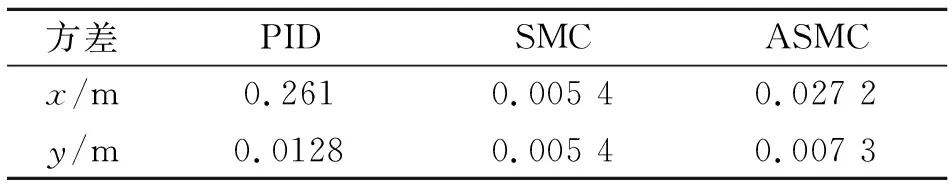
表3 控制器輸出方差
對表1進行分析,ASMC控制器的x軸偏差的平均值僅為PID控制器的1.64%,為SMC控制器的1.87%,ASMC的y軸控制偏差為PID的31.87%,為SMC控制器的30.46%,證明本文設計的ASMC具有更好的控制效果。分析表2,ASMC控制器的x軸輸出方差為PID控制器的10.42%,ASMC的y軸輸出方差為PID的57.03%,證明本文ASMC具有更好的控制效果。此外,本文設計的ASMC控制器的抖振情況優于PID控制器。
4 實驗驗證與分析
本文的實驗環境如圖11所示,實驗樣機(輪式機器人)和實驗所用軟件如圖12所示。
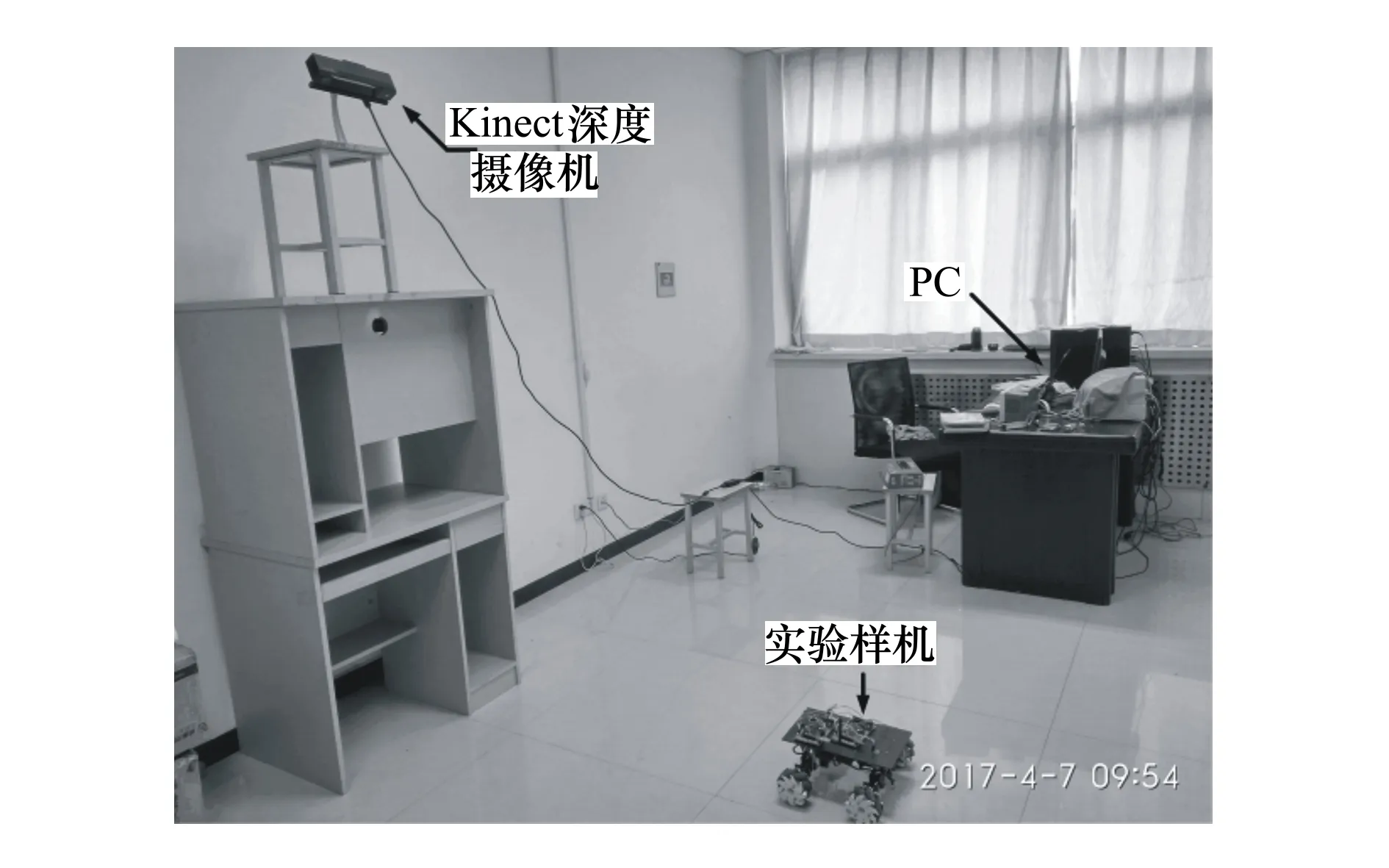
圖11 實驗環境
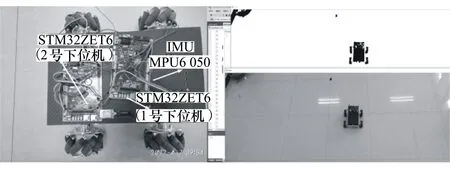
圖12 實驗樣機與軟件
本文實驗驗證設備電控流程圖如圖13,由Kinect深度相機連接PC端,通過USB通信經過機器視覺處理獲得機器人的x軸和y軸的坐標信息,進而通過串口將信息傳輸給STM32VET6單片機,VET6單片機利用SPI通信借助NRF24L01通過2.4GHz通信,將x軸和y軸的坐標信息傳輸到STM32ZET6單片機,本文定義其為一號下位機,而與一號下位機連接的還有IMU(MPU6050)用于提供機器人的φ角度信息,一號下位機獲得這些信息后,通過與函數發生器對比產生偏差,進而通過ASMC控制器產生速度控制信號,并通過UART將信號傳出給另外一片STM32ZET6,本文定義其為二號下位機,二號下位機接收到速度控制信號后經過逆運動學解算獲得4只直流電機的期望速度,通過PID控制器對電機速度進行控制,達到控制目的。
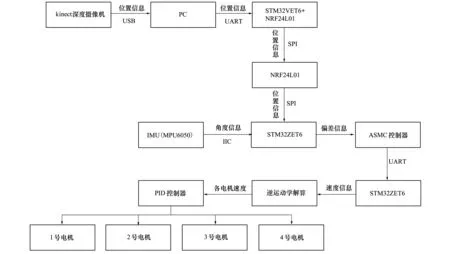
圖13 實驗流程
實驗驗證過程中,跟蹤函數使用同3.2節中仿真所用類似的標稱軌跡:
?t≥0
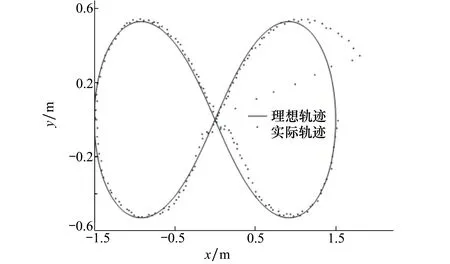
圖14 軌跡跟蹤
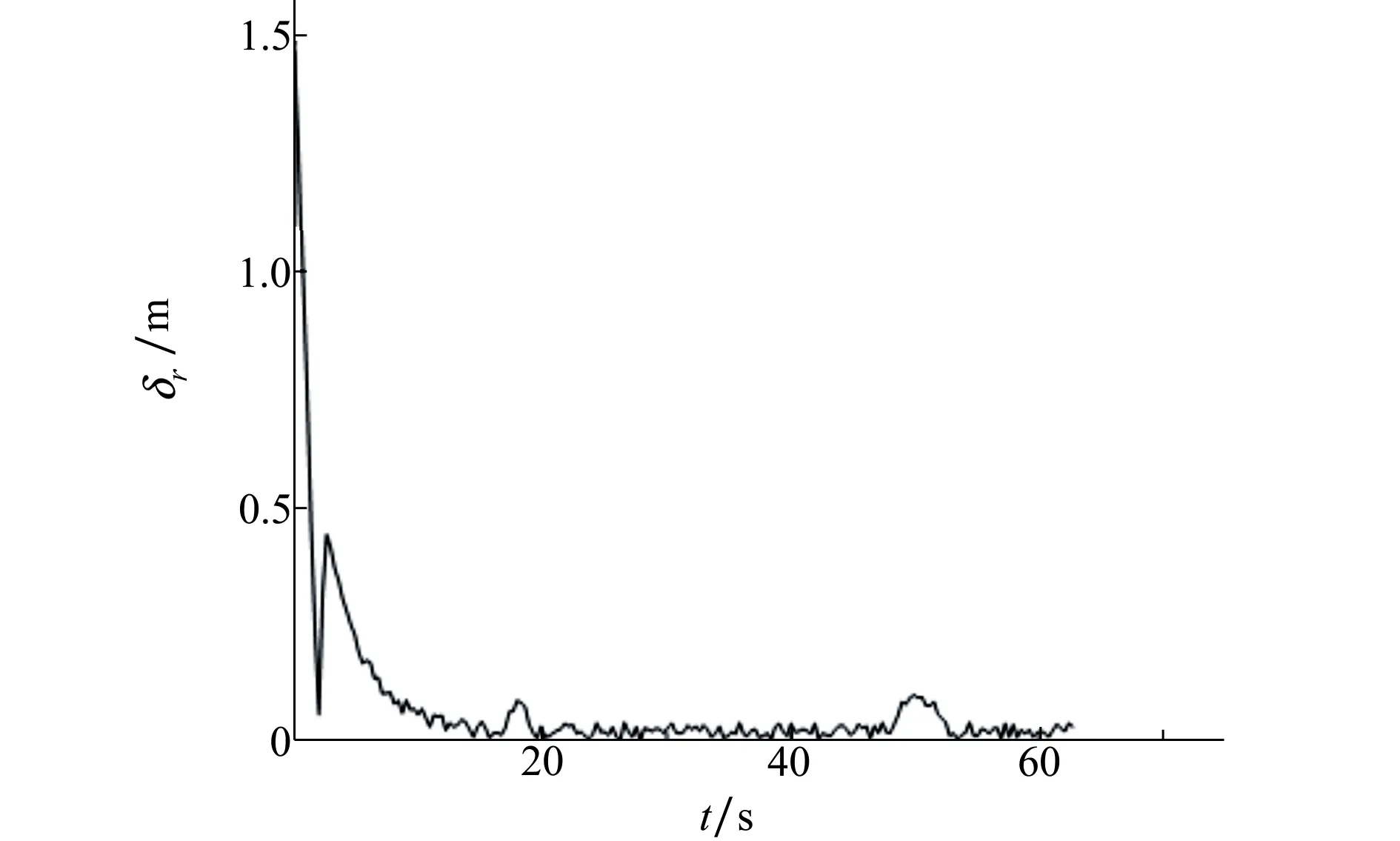
圖15 距離誤差


圖16 實驗結果
5 結 論
本文針對麥克納姆輪驅動的全向移動機器人的軌跡跟蹤問題,在運動學建模的基礎上設計了自適應滑模控制器。控制器設計分為3個步驟:滑模面設計、趨近律設計以及自適應律設計。通過上述3個步驟完成了自適應滑模控制器的設計并利用李雅普諾夫函數證明了其穩定性。存在脈沖擾動以及正弦信號擾動條件下對控制器進行了仿真驗證,并將結果與傳統PID控制器和普通滑模控制器利用統計學的方法進行了對比,統計結果表明本文設計的控制器具有響應快速,魯棒性強等優點。最后為驗證控制器的實用性,構建了專用的麥克納姆輪全向移動機器人,并利用Kinect深度攝像頭和IMU搭建了實驗平臺對機器人進行了實際的軌跡跟蹤控制實驗,結果表明該控制器能夠高精度的控制機器人完成軌跡跟蹤,證明了文中所設計控制器的可行性與有效性。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
智能系統學報(2015年4期)2015-12-27 09:38:35
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
