無人機和反潛巡邏機協同護航反潛配置研究
2018-09-10 02:09:40徐梁潘宣宏
無人機 2018年6期
徐梁 潘宣宏
隨著無人機作戰應用范圍的擴大,通過與反潛巡邏機協同作戰,將是未來航空反潛的重要方式。基于反潛巡邏機和無人機協同反潛作戰過程和任務,提出了反潛巡邏機和無人機協同配置原則,確定了反潛巡邏機和無人機前出距離、巡邏線設置方法。仿真分析結果驗證了協同反潛配置方法的可行性、實用性,為反潛巡邏機和無人機協同護航反潛作戰提供了參考,對無人機快速融入到現行反潛作戰體系提供了有效的解決途徑。
潛艇具有隱蔽性強、續航時間長、探測距離遠等作戰優勢,可實現對目標的隱蔽偵查、跟蹤和火力打擊,是艦船編隊面臨的主要威脅。因反潛巡邏機具有搜索速度快、搜索效率高等優勢一直以來都是編隊實施遠程反潛的主要兵力。但反潛巡邏機續航時間短、作戰半徑小、缺乏自衛能力等又增加了反潛難度,限制了其使用范圍。而無人機則具有續航時間長、機動靈活、作戰半徑大和不考慮傷亡等優勢,與反潛巡邏機協同混編作戰,可實現兩者的優勢互補,提升航空反潛戰術運用的靈活性。目前關于有人機和無人機協同作戰的理論多集中于協同偵查監視、協同火力打擊,以及協同指控技術等方面,為適應未來海上反潛作戰需求,結合海軍岸基、艦載、空載無人機裝備發展現狀和趨勢,研究反潛巡邏機和無人機協同反潛作戰具有較強的前瞻性和實際應用價值。
反潛巡邏機和無人機協同反潛作戰過程分析
為了確定艦船編隊中反潛巡邏機和無人機的配置,首先應分析反潛巡邏機和無人機協同護航反潛過程。根據反潛巡邏機和無人機的戰技術性能和反潛特性,借鑒國外反潛巡邏機運用情況,反潛巡邏機在編隊外圍實施先期反潛,無人機則在反潛巡邏機的指揮通信范圍內遂行更遠距離的偵察監視任務,形成遠程反潛網絡,并在敵潛艇到達反艦導彈攻擊陣地之前發現并將其消滅。
無人機一旦發現敵潛艇活動跡象,實時地向反潛巡邏機傳送目標位置信息。反潛巡邏機則根據無人機提供的信息進行準確跟蹤、識別、定位,并完成最后的攻擊。由于無人機載重小,可以攜帶的任務載荷種類相對較少,必須合理規劃無人機的搭載方案,以提高發現潛艇的概率。例如雷達+電子/紅外探測設備,主要對露出水面或進行通信的潛艇進行探測;雷達+小型磁探儀主要對水下或半潛的潛艇進行探測。反潛巡邏機則主要攜帶魚雷等攻潛武器對目標進行最后的攻擊,可攜帶少量的主動聲納浮標進行攻擊前的最后定位。
協同配置原則
通過反潛巡邏機和無人機協同護航反潛過程的分析,在編隊航渡過程中反潛巡邏機和無人機的陣位配置取決于所承擔的任務。根據編隊護航反潛的需求,以及反潛巡邏機和無人機的戰技術性能,兩者在協同護航反潛過程中必須滿足以下原則:
(1)配置于編隊受威脅的主要方向。在外層反潛體系中,反潛巡邏機和無人機配置的主要威脅方向,應是敵潛艇能夠快速占據導彈攻擊陣位,并能保證在導彈攻擊完畢后迅速撤離,即敵潛艇使用反艦導彈有利攻擊扇面內。如果無人機數量充足,也可圍繞編隊成環形配置。當受敵機威脅較大時,反潛巡邏機還應受到我殲擊航空兵的掩護。
(2)反潛巡邏機的前出距離需要綜合考慮續航時間、任務持續時間和敵情威脅等,在滿足編隊所需的反潛縱深條件下,應保證反潛巡邏機在空中有較長的巡邏時間;
(3)無人機應在反潛巡邏機監控范圍內,能夠與反潛巡邏機之間建立穩定的通信聯系,并能實時傳送數據;
(4)反潛巡邏機和無人機陣位設置應便于編隊指揮所的控制。當無人機前出距離較大時,通過反潛巡邏機上完善的指揮通信系統實現無人機遠程控制。
反潛巡邏機和無人機前出距離確定
反潛巡邏機和無人機遠界確定
可以看出若有殲擊機掩護條件下,反潛巡邏機的前出距離就可以由殲擊機的前出距離,以及反潛巡邏機和殲擊機陣位之間的距離來確定。
反潛巡邏機和無人機近界確定
艦船編隊防潛縱深是指在敵潛艇占領導彈發射陣位之前,能夠對其及時發現、識別并實施攻擊,無人機最遲發現護航反潛作戰的過程,如圖3所示。
反潛巡邏機和無人機巡邏線配置
護航反潛過程中反潛巡邏機和無人機不可能保持在某一個陣位,而是在一定空域或巡邏線上往返飛行。而在編隊航行過程中,反潛巡邏機和無人機參考的基準點是不斷變化的,因而兩者的巡邏空域或巡邏線應隨著編隊有規律的前移。而在實際的運用中,反潛巡邏機通常在編隊前方按照巡邏線飛行,以盡可能遮攔敵潛艇主要威脅扇面,這符合原則(1)配置要求。文章以此討論反潛巡邏機和無人機的配置。
如圖4所示,直線MN為反潛巡邏機的巡邏線,垂直于威脅軸,其中兩個圓分別是反潛巡邏機分別在兩個端點能夠有效監聽無人機的距離范圍。
反潛巡邏機有效監聽無人機的距離40km,巡航高度6000m,巡航速度460km/h,續航時間6h30min,轉彎半徑4km。上級指定的巡邏時間為5h,儲備時間20min。無人機發現水面通氣管的距離為70km,速度為300km/h,巡航高度4000m,無人機發現敵潛艇時可能存在的艇位誤差為20m。預警機為反潛機提供的預警距離為260km,發現敵機后,綜合識別并發出警報時間15s。紅方殲擊機陣位與基準點的距離為250km,巡航速度為900km/h。空空彈最大射程為120km,速度為4Ma。無人機從發現潛艇目標,跟蹤識別并向指揮所發出警報的時間為5min;指揮員根據無人機獲取的目標信息制定作戰方案,給反潛巡邏機下達攻擊命令持續時間為4min;反潛巡邏機從巡邏空域快速飛向發現目標區,完成搜索、跟蹤、攻擊持續的時間在25min。水面艦船編隊的航速為24kn。
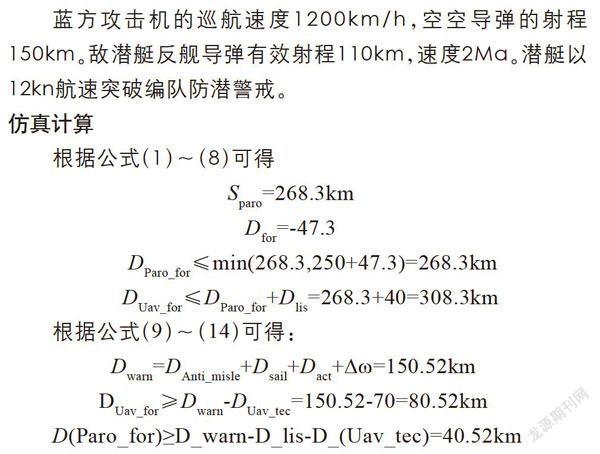
藍方攻擊機的巡航速度1200km/h,空空導彈的射程150km。敵潛艇反艦導彈有效射程llOkm,速度2Ma。潛艇以12kn航速突破編隊防潛警戒。
上面計算說明,反潛巡邏機和無人機提供的反潛縱深滿足護航反潛的需求,無人機前出的距離至少在80.52km以上,而反潛巡邏機只需前出40.52km即可,相應的反潛巡邏機用于巡邏警戒的時間延長。
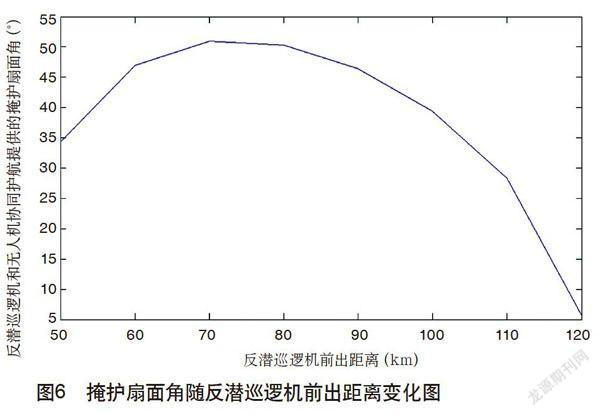
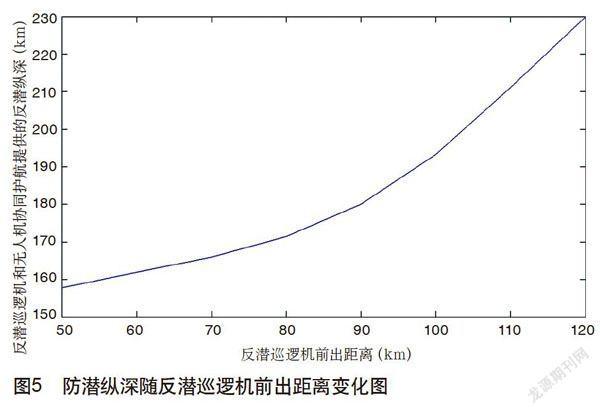
而當反潛巡邏機的前出距離分別在50km、60km、70km、llOkm、120km時,編隊防潛警戒縱深與掩護扇面角隨反潛巡邏機前出距離之間的關系如圖5所示。
從上圖5和圖6可知,在反潛巡邏機巡邏線長度一定的情況下,反潛巡邏機和無人機提供的反潛縱深和掩護扇面角隨著反潛巡邏機前出距離的增加而增加;在前出距離大于70km以后,掩護扇面角開始急劇下降。基于本想定,反潛巡邏機前出距離在70km,反潛縱深在166km時,掩護扇面角達到最大為51°。
結束語
本文對反潛巡邏機和無人機協同反潛空域配置方法進行了探討,通過仿真結果驗證了反潛巡邏機和無人機協同護航反潛的可行性和實用性。其中編隊防潛縱深和掩護扇面角與反潛巡邏機前出距離有直接關系,并給出了掩護扇面角最大時反潛巡邏機前出的距離,以及防潛縱深。而隨著編隊規模、作戰環境和作戰對象的不同,反潛巡邏機和無人機陣位,為編隊提供的反潛縱深、掩護扇面角,以及巡邏線長度之間也會相應變化,并最終達到一種平衡,即作戰效能最大化。