無人機超低空飛行控制系統(tǒng)優(yōu)化
2018-09-10 22:15:28劉學(xué)業(yè)
無人機 2018年5期
劉學(xué)業(yè)
針對武器系統(tǒng)對無人機超低空掠海飛行要求,對某型無人機進行了超低空飛行動力建模、超低空高度信息融合技術(shù)和飛行任務(wù)剖面研究,開展了半實物仿真及飛行驗證。結(jié)果表明,無人機超低空飛行控制改進優(yōu)化合理、可行。
無人機超低空飛行可以模擬真實反艦導(dǎo)彈飛行特性,在武器裝備試驗訓(xùn)練領(lǐng)域具有較大應(yīng)用前景。本文以現(xiàn)有某型成熟無人機為基礎(chǔ)平臺,通過對其飛行控制原理研究及控制策略優(yōu)化改進,以期達成具備穩(wěn)定超低空掠海飛行能力。
無人機超低空飛行動力建模研究
無人機控制原理
該無人機飛控系統(tǒng)主要由電源分系統(tǒng)、傳感器分系統(tǒng)、飛行控制器分系統(tǒng)、遙控遙測分系統(tǒng)和執(zhí)行機構(gòu)分系統(tǒng)所組成,各分系統(tǒng)既相對獨立的完成各自的功能,又相互協(xié)調(diào),統(tǒng)一管理,構(gòu)成了完整的飛控系統(tǒng)。無人機飛行控制回路采用的是數(shù)字電路和模擬電路混合方式,具有控制靈活、響應(yīng)速度快、可靠性高等優(yōu)點。由飛行控制系統(tǒng)構(gòu)成的閉環(huán)負反饋系統(tǒng)見圖1。
無人機分為兩個控制方向,即縱向控制和橫側(cè)向控制。縱向控制用來控制無人機的俯仰角度的穩(wěn)定以及對無人機的飛行高度進行控制;而橫側(cè)向控制則可以用來控制無人機的滾轉(zhuǎn)角度和用來調(diào)節(jié)無人機的航向。兩種控制方向結(jié)合既實現(xiàn)了對無人機飛行姿態(tài)的控制,又完成了對高度的調(diào)整,最終能夠?qū)崿F(xiàn)對無人機飛行的完整控制效果。
該無人機采用分階段方式控制,主要分為平飛、爬升和俯沖、左右盤旋、定高與定航向、導(dǎo)航等不同階段,分別采用不同的控制律進行控制,該無人機經(jīng)過多架次lOOm以上飛行高度驗證,飛行性能穩(wěn)定可靠。
地效特性建模
該型無人機具有完整的空中氣動數(shù)據(jù)與空氣動力學(xué)與運動學(xué)模型,但在超低空飛行時會產(chǎn)生附加的地面(海面)氣動效能,主要體現(xiàn)為附加氣動力、氣動力矩、氣動舵效,并且參考面積越大的無人機地效特性越明顯。因此,超低空掠海飛行控制技術(shù)研究需要基于已有的飛行運動學(xué)與動力學(xué)模型,完善低空地效氣動特性建模,提升超低空飛行過程中的模型準確度。
根據(jù)空氣動力學(xué),地效氣動特性與距離地面高度關(guān)系緊密,按照通用性設(shè)計理論,地效氣動增量可以描述為高度的函數(shù),受影響的物理量包括縱橫向基本力與力矩系數(shù)以及對應(yīng)的操縱導(dǎo)數(shù)。實際工程中由于無人機翼展與參考面積較小,對地效的敏感性相對大翼展飛機較弱,可以考慮忽略地效對橫航向靜穩(wěn)定性導(dǎo)數(shù)與航向操縱導(dǎo)數(shù)的影響,主要對受垂向氣流影響較大的縱向力與力矩系數(shù)以及橫向操縱導(dǎo)數(shù)進行建模。
針對無人機縱向通道數(shù)學(xué)模型,通過開展對已有數(shù)據(jù)高度、俯仰姿態(tài)、升降舵面之間的關(guān)系分析,與數(shù)學(xué)模型的配平特性進行比較,可以對比得出縱向靜穩(wěn)定性導(dǎo)數(shù)與升降舵操縱導(dǎo)數(shù)的差異,并予以在模型中進行補償,通過二次校正對比,以驗證模型校正的準確性。
高度控制系統(tǒng)設(shè)計
無人機進行30m以下高度的掠海穩(wěn)定飛行過程中,干擾引起的高度控制偏差、超調(diào)等,極易引起飛行的失敗,因此需要采用基于過載控制的強魯棒控制方式進行無人機高度通道的設(shè)計,以提升抗干擾能力,增加高度安全性。
加速度與角速率是飛行器運動周期最短,對氣動力與氣動力矩最敏感的物理量,采用以法向加速度與俯仰角速率作為高度控制的內(nèi)核,可以提升系統(tǒng)的抗外部干擾能力以及指令的快速跟蹤能力,實現(xiàn)較好的魯棒性與快速性。
外環(huán)以高度差的比例PID結(jié)構(gòu)產(chǎn)生高度到過載指令的控制,通過高度差的積分環(huán)節(jié)可以提升系統(tǒng)抗內(nèi)環(huán)傳感器漂移的能力與指令跟蹤的精度,通過高度差的PID參數(shù)綜合設(shè)計可以實現(xiàn)高度指令的快速無超調(diào)跟蹤能力。
無人機超低空高度信息融合技術(shù)研究
無人機進行超低空掠海飛行時,由于受到海浪、氣流的影響,無論采用無線電高度計、氣壓高度計,還是全球定位系統(tǒng)(GPS)進行海拔高度測量,都存在一定的不準確性。因此需要設(shè)計研究出適用于超低空掠海飛行高度的測量技術(shù)。
組合高度原理
超低空高度信息融合技術(shù)擬采用不變性原理,按照梅森公式與線性疊加原理設(shè)計基于垂向加速度與無線電高度表的海浪濾波器,組合高度是由無線電高度表、垂直加速度計和算法組成。其原理是:用兩種互不相關(guān)的高度測量系統(tǒng)測量同一高度,比較兩者的結(jié)果,并予以補償,以實現(xiàn)不變性原理。也就是把慣性高度輸出信息和無線電高度表輸出信息進行比較,然后構(gòu)成反饋補償,以保證系統(tǒng)的穩(wěn)定性。組合高度的基本原理如下式所示。
hc =■hw (1)
其中,hc為組合高度,hw無線電高度(此處說明公式中各參數(shù))。因此,高度組合原理是一種互補濾波的體現(xiàn),即組合高度高頻段取決于加速度計積分高度,低頻段取決于無線電高度表的測量。
高度信息融合分析
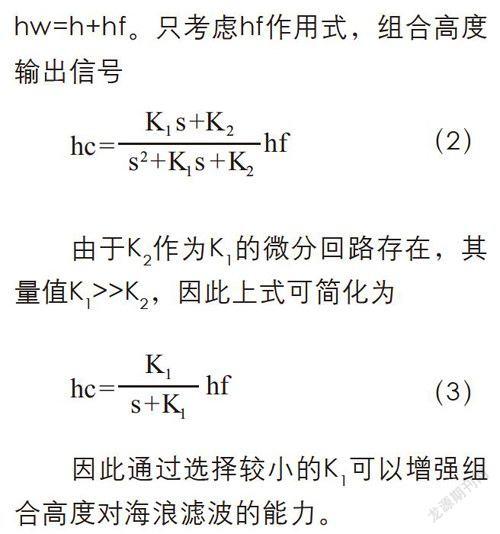
無線電高度表的原理是通過電磁波反射測高,因此陣風(fēng)、海浪、潮涌、雜波的干擾影響很大,不可忽略。如不削弱這種干擾,會使無線電高度表輸出的信噪比降低,影響測高精度。噪聲占據(jù)信號通路,阻塞有用信號通過,還會使信號通道提前飽和,造成系統(tǒng)失控。
因此通過選擇較小的K.可以增強組合高度對海浪濾波的能力。姿態(tài)信息控制分析
由于姿態(tài)控制一般作為高度控制的內(nèi)核,故采用陀螺儀測量出的姿態(tài)精度將直接影響高度跟蹤的特性。因此,需要分析評估陀螺漂移特性,研究適應(yīng)一定程度下的陀螺漂移特性的高度跟蹤控制技術(shù)。采用基于積分算法的自動配平技術(shù)來予以補償,并考慮采用基于過載的高度跟蹤控制實現(xiàn)超低空掠海任務(wù),姿態(tài)角作為坐標變換量,經(jīng)過三角關(guān)系轉(zhuǎn)換后其影響權(quán)重相對直接控制量大幅弱化,在基于已有試飛數(shù)據(jù)中的對陀螺漂移特性進行綜合研究,對抗漂移積分算子進行優(yōu)化設(shè)計與綜合評估,實現(xiàn)有限陀螺漂移狀態(tài)下的抗漂移控制能力。
無人機超低空飛行任務(wù)剖面研究
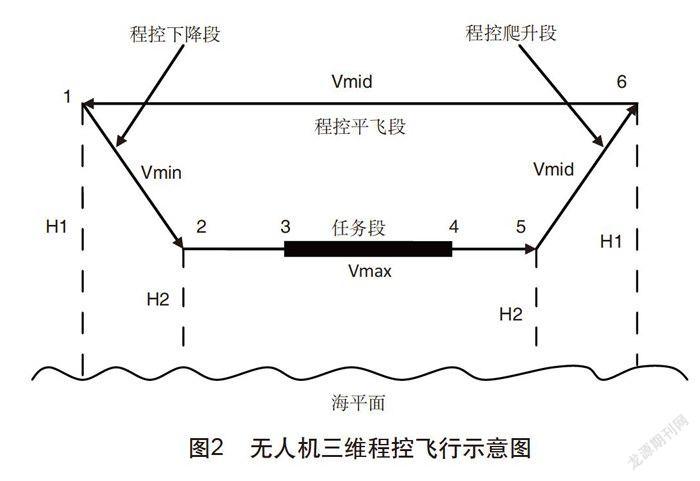
為確保飛行安全,無人機全航程段采用三維程控飛行控制方式,當(dāng)飛機進入超低空飛行階段,首先調(diào)整發(fā)動機油門至低速狀態(tài),根據(jù)下一目標點的要求,控制飛機分階段、梯度式降高,逐漸降至目標點高度要求。控制飛機進入航線,開始進行超低空飛行,在任務(wù)段加大油門,使速度達到任務(wù)要求,此階段高度的控制采用融合高度方式,保證飛機飛行高度的準確性及穩(wěn)定性。飛過任務(wù)段后,飛機首先減小油門,將速度降至巡航狀態(tài)。根據(jù)下一目標點坐標及高度要求,朝下一目標點飛行。
無人機飛行前需進行程控航路設(shè)定,設(shè)定飛機的航路坐標點,圖2中的1-6點的經(jīng)緯度坐標及高度值,設(shè)定航路點的任務(wù)屬性。整個程控段根據(jù)航路點的任務(wù)屬性,飛控分系統(tǒng)自動完成程控平飛段、程控下降段、任務(wù)供靶段和程控爬升段的飛行。航路點的設(shè)定由地面站完成,由操作人員在界面上直接用鼠標設(shè)計航路。
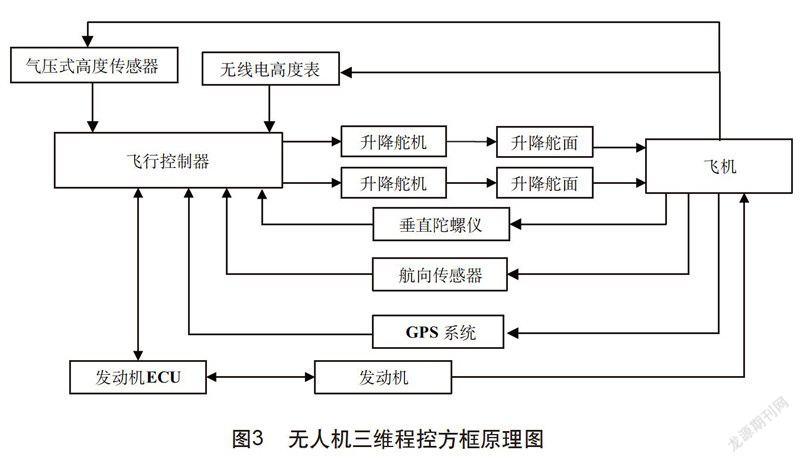
無人機飛行控制系統(tǒng)程控飛行時加入縱向剖面的高度控制、油門開環(huán)控制、航向控制、全球定位系統(tǒng)測量得到的航跡側(cè)偏距控制,可滿足低空掠海的要求,從而形成三維航路的程控飛行。三維程控方框原理圖如圖3所示。
半實物仿真及驗證飛行
依據(jù)無人機數(shù)學(xué)模型、設(shè)計的飛行控制律以及編制的飛控軟件,搭建了半實物仿真環(huán)境,開展了模擬海浪干擾、突風(fēng)干擾、陀螺漂移、系統(tǒng)時延、氣動拉偏等特性的超低空掠海半實物飛行仿真,驗證了系統(tǒng)控制邏輯、控制策略、控制品質(zhì)與魯棒特性,并進行了2架次50m超低空飛行。飛行數(shù)據(jù)分析表明,無人機在降高拉平過程中無高度超調(diào),高度跟蹤誤差為2m,并保持穩(wěn)態(tài)。試驗初步驗證了改進優(yōu)化方案可行性,后續(xù)將繼續(xù)開展更低高度飛行驗證。