單自由度平面六桿手指機構解域綜合方法
2018-09-17 06:49:44韓建友蔡營疆
農業機械學報 2018年9期
關鍵詞:設計
韓建友 蔡營疆
(北京科技大學機械工程學院, 北京 100083)
0 引言
仿生手的發展給殘疾人的生活帶來極大的便利。為實現人手指的功能,許多手指被發明出來,比如采用記憶合金的手指[1-3]具有無噪聲的特點。POTRATZ等[4]采用彈簧來減輕手指的質量,但其具有5個自由度,需要較多的驅動電機。LOTTI等[5]采用由彈性鉸鏈構成的連桿機構,其自由度為4,成本較高。還有采用單晶硅的手指[6]和欠驅動多自由度手指,比如Belgrade/USC手指[7]、TBM手指[8]和SPRING手指[9],這些手指采用腱驅動其中的幾個關節即可實現運動,沒有被驅動的關節的運動則取決于抓取物體的外形。除此之外,欠驅動手指理論也有一定的發展[10-12]。欠驅動手指分為兩類,一種是采用肌腱驅動的手指,一種是采用連桿驅動的手指,如文獻[13]中的手指同時采用平面五桿機構和平面四桿機構,其成本較低。也有根據人手骨骼結構設計的手指[14],然而這種手指結構比較復雜,加工較難。另外,也有采用氣動柔性驅動器進行驅動的手指[15-16],但其仿生程度不高。連桿機構可以應用于康復手指的設計,但是在已有的康復手指中,文獻[17-18]根據初始的條件只得到一個確定的機構。本文采用單自由度平面六桿機構設計手指機構,其控制簡單,采用1個電機即可實現控制,易加工,且通過解域法得到滿足初始條件的無窮多機構,每個機構都可以應用于手指的設計,因此可達到機器人手指多用途、多尺寸、易控制的要求。同時為得到較好的力學性能,引入力傳遞性能指標K[19]。本文在文獻[20-21]的基礎上進行改進和擴展,對解域的形成給出不同的生成方法,該方法能更明確地表示出解域上連續變化的性能,從而形成所需要的各種曲線,并引入力傳遞性能指標。
1 手指機構綜合
本文首先給出手指機構的3個指節的4個運動位置,并給定手指關節的坐標限制范圍,據此得到鉸鏈點的可行曲線段,對可行曲線段進行分段,形成解域,然后引入力傳遞性能指標K,對解域進行篩選,得到可行解域,最后在解域中選擇一個平面六桿機構,得到手指機構的全部參數,并根據選擇的機構給出手指的設計示例,整個過程如圖1所示。

圖2 連桿平面運動示意圖Fig.2 Diagram of links planar motion
1.1 運動生成綜合理論


(1)
(2)
根據桿長不變原理,連桿BM的長度不變,即
[Bi-Mi]T[Bi-Mi]=[B1-M1]T[B1-M1]
(3)
將式(1)、(2)代入式(3),整理可得
CixB1+EiyB1+Fi=0 (i=2,3,4)
(4)
把xB1和yB1看作未知數,則式(4)有解的條件為
(5)
整理可得鉸鏈點M滿足的三次曲線方程[22-24]
(6)
曲線(6)為廣義布爾梅斯特曲線,在曲線(6)上取得一點,可得鉸鏈點M在運動位置1的坐標,代入式(4)即可得到對應的鉸鏈點B在運動位置1的坐標。若其中一個連桿平面為固定平面,則對應的位移矩陣為單位矩陣,此時曲線(6)為布爾梅斯特曲線。利用本節求曲線方程的方法,可對平面六桿機構進行綜合。
1.2 解曲線及解域生成
本文采用Watt-I型平面六桿機構設計手指。平面六桿機構需要實現人手指彎曲的動作,同時,當有外力施加到機構上時,機構需要具有良好的力學傳遞性能。文獻[20]根據Watt-I型平面六桿機構4位置運動生成理論得到解域,其表達了所有Watt-I型平面六桿機構在解域中的位置,但未能表達機構的力學性能和鉸鏈點的實際坐標,本文在此基礎上,給出新的解域生成方法,對曲線分段,按鉸鏈點的實際坐標生成3部分解域,將鉸鏈點坐標直接表達在解域上,除此之外,引入力傳遞性能指標K,得到K在解域上的分布規律,使得解域中機構的力學性能更加直觀。

圖3 單自由度平面六桿機構Fig.3 Planar six-bar mechanism with one DOF
圖3為單自由度平面六桿機構,其通過4個預定的運動位置(位置1、2、3、4)。鉸鏈點a0和鉸鏈點d0為固定鉸鏈點,其他鉸鏈點為動鉸鏈點,且鉸鏈點a0位于所選坐標系的原點,鉸鏈點d、e、f、d0為待求鉸鏈點。θ1、θ2、θ3分別為a0a、ab、bc與x軸的夾角(按右手法則,逆時針為正)。L1、L2、L3分別為a0a、ab、bc的長度。F為施加在連桿bce上的外力(為簡化受力狀態,將外力施加在1個連桿上),T為施加在連架桿a0ad上的力矩。在運動過程中F的大小不變(為方便計算,示例中設置為1 N),驅動力矩T為待求量。
根據人手指3個指節的長度,給定L1、L2、L3的值,如表1所示。給定θ1、θ2、θ3在4個運動位置的值,如表2所示,給定鉸鏈點d0、d、e、f的坐標限制范圍,如表3所示。通過連架桿a0a的4個位置和連桿bc的4個位置,即2個連桿平面,采用1.1節求鉸鏈點曲線的方法,得到在運動位置1處鉸鏈點d的解曲線(Cd)及可行段,也可得到鉸鏈點e的解曲線(Ce)和可行段,此時a0、a分別對應圖2中的b、m。θ1、θ2分別對應圖2中的α、β。d、e分別對應圖2中的B、M,通過計算整理得Cd和Ce,其與式(6)具有相同的形式。圖4顯示了解曲線Cd和可行段。由于Cd可行段上的點和Ce可行段上的點需同時滿足各自的坐標限制范圍,Cd可行段并不連續。

表1 L1、L2、L3的值Tab.1 Values of L1, L2 and L3 mm

表2 θ1、θ2、θ3在4個運動位置的值Tab.2 Values of θ1, θ2 and θ3 in four moving positions (°)

表3 待求鉸鏈點坐標限制范圍Tab.3 Limited ranges of coordinates of unknown joints mm
Cd可行段上的點和Ce可行段上的點有一一對應的關系。在Cd可行段上選擇一點后,與該點對應的鉸鏈點e也確定,即確定連桿de在運動位置1處的位置,通過鉸鏈點d和鉸鏈點e可得到連桿a0ad和連桿bce的尺寸,基于此,得到鉸鏈點d和鉸鏈點e在其他運動位置的坐標,通過連桿de的4個位置和機架,采用1.1節求鉸鏈點曲線的方法,得到鉸鏈點d0在運動位置1處的解曲線(Cd0)和可行段,也可得到鉸鏈點f的解曲線(Cf)和可行段。此時原點O、d分別對應圖2中的b、m。de為圖2中的lm1且α為0°。d0、f分別對應圖2中的B、M,通過計算整理得到Cd0和Cf,其與式(6)具有相同的形式。
在Cd可行段上選擇不同的點會得到不同的解曲線Cd0和可行段,圖5和圖6分別為當選擇圖4中點A和點B后得到的鉸鏈點d0的解曲線和可行段。Cd0可行段上的點和Cf可行段上的點也有一一對應的關系。在Cd0上選擇一點后,就確定了連桿d0f在運動位置1的位置,結合連桿de在運動位置1處的位置,就確定了1個平面六桿機構。
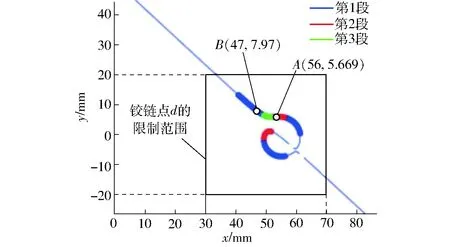
圖4 鉸鏈點d解曲線和可行段Fig.4 Solution curve and feasible curves of joint d
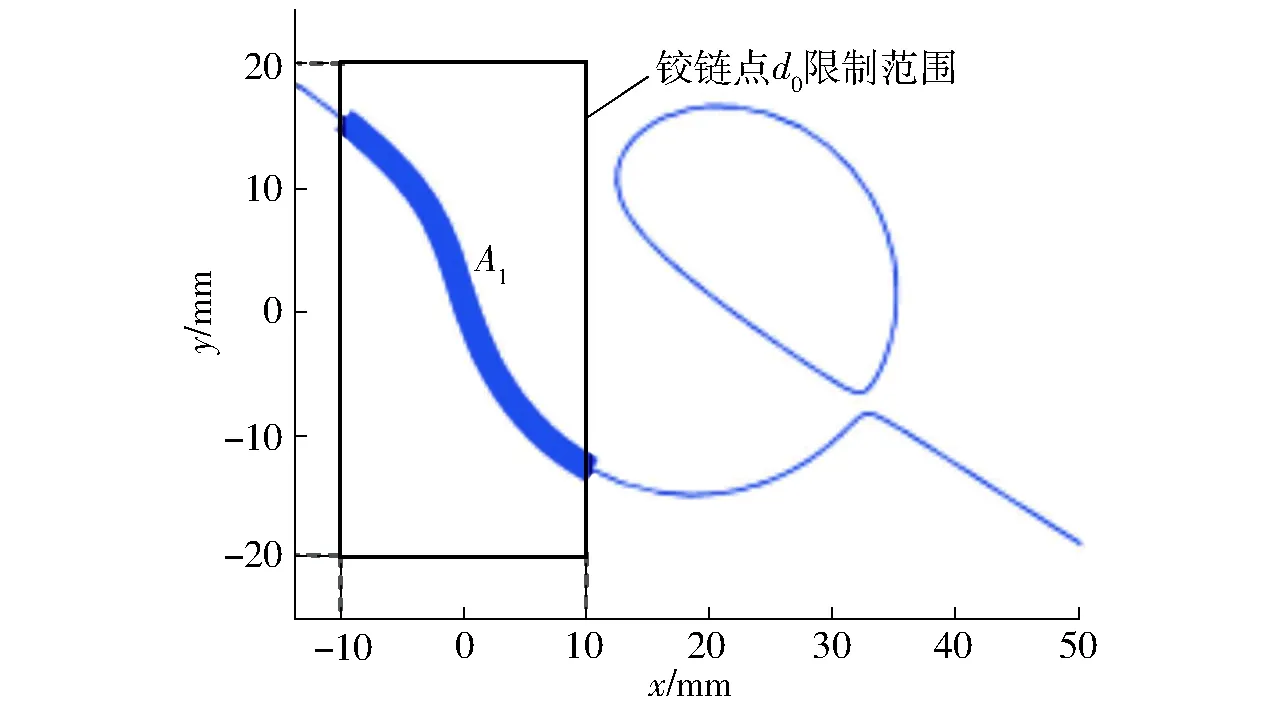
圖5 圖4中取A點得到的鉸鏈點d0解曲線及可行段Fig.5 Solution curve and feasible segments for joint d0 corresponding to point A in Fig.4
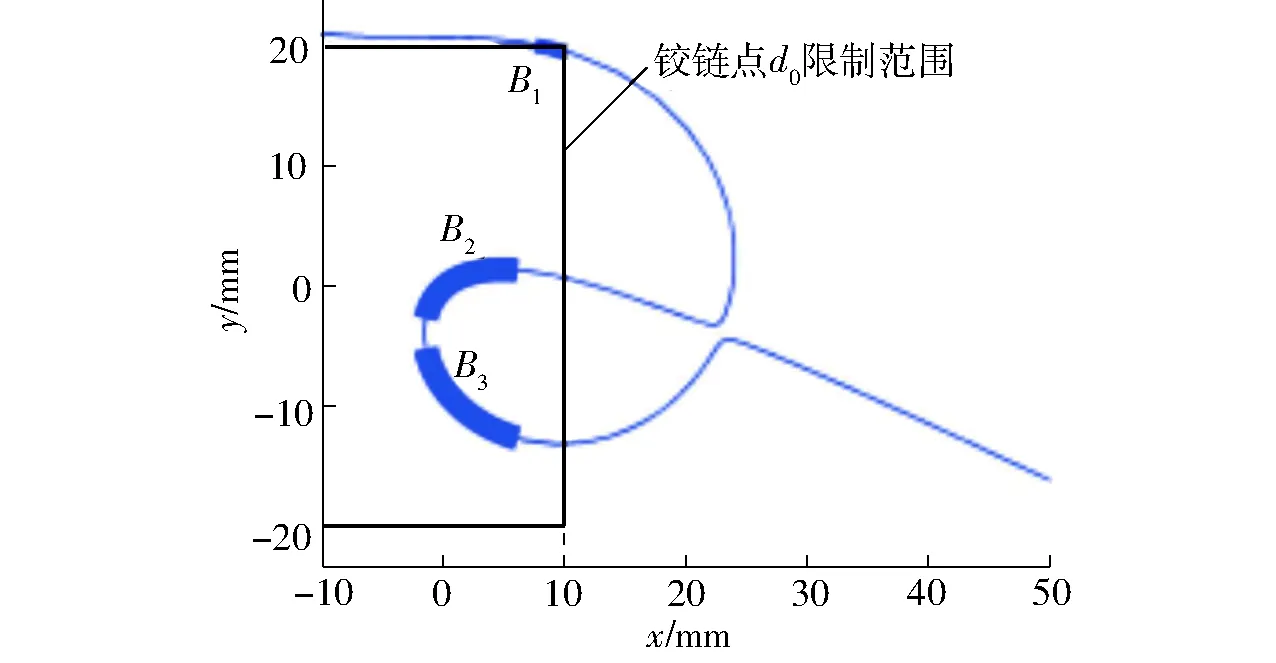
圖6 圖4中取B點得到的鉸鏈點d0解曲線及可行段Fig.6 Solution curve and feasible segments for joint d0 corresponding to point B in Fig.4
連桿de和連桿d0f的位置分別由4個坐標分量(dx,dy,ex,ey)之一和4個坐標分量(d0x,d0y,fx,fy)之一決定,因此,可采用dx和d0x分別為橫坐標和縱坐標生成解域。當x為一定值時,三次曲線方程變為關于y的一元三次方程,其可能有1個或3個實根。因此,對曲線按如下規則進行分段:當只有1個實根時,點(x,y)分入第1段曲線;當有3個實根時,按照y從小到大的順序把點(x,y)分別分入第1、第2、第3段曲線。根據此分段規則,Cd可行段被分為3段,其橫坐標范圍分別為41.2~61.6、49.6~56.4、49.6~52.0,如圖4所示。Cd0被分為1段或者3段。在Cd可行段上選擇一點,得到點(dx,dy),并在得到的Cd0可行段上選擇一點,得到點(d0x,d0y),則解域點為(dx,d0x),令m(m=1, 2, 3)和n(n=1, 2, 3)分別表示點(dx,dy)和點(d0x,d0y)所在的曲線段標號,則解域點(dx,d0x)在圖7中的區域(m,n)(即圖7中圓圈中的數字)。從橫坐標41.2到56.4按照步長0.2選擇Cd可行段上的每一點,并選擇得到的Cd0可行段上的每一點,得到如圖7所示的解域。解域中的A1(一條實線)對應圖5可行段A1。B1、B3組成圖6可行段的第1段,B2為圖6可行段的第2段。

圖7 平面六桿機構解域Fig.7 Solution region for planar six-bar mechanisms
1.3 力傳遞性能指標的確定和可行解域生成
為得到力學性能較好的機構,引入力傳遞性能指標。壓力角可衡量一個機構的力傳遞性能,但只有當外力施加在連架桿上時,壓力角才適用[19]。本文中外力F施加在連桿bce上,而不是連架桿d0f或者連架桿a0ad,故此時壓力角并不適用于衡量機構的力傳遞性能,故本文引入K。
如圖3所示,在運動過程中,假設外力F總是垂直于邊ec,并位于邊ec的中點。為方便計算,設外力F為1 N。在θ1從0°連續變化到-40°的過程中,令Fmax_i(i=a,b,d,e,f,a0,d0)表示鉸鏈點i的內力最大值,令Fmax表示Fmax_i(i=a,b,d,e,f,a0,d0)中的最大值,則參數K表示為[19]
(7)
根據手指的設計目的(如康復手指、仿生手指等),限制K的大小。康復手指對力學性能要求較高,可取較小的K,而仿生手如果僅著重于外形,則可取較大的K。本文限制K≤20。利用K對圖7中的所有機構進行篩選,可得到篩選后的鉸鏈點可行段。圖8為引入K后鉸鏈點d的解曲線和可行段。當選擇圖8中可行段上的C點后,得到篩選后的鉸鏈點d0可行段,如圖9所示。根據上文提到的曲線分段規則重新對可行段進行分段,得到如圖10所示的新的可行解域。圖10中解域1和解域2為后文選擇平面六桿機構的區域,圖中點E、F、G和H坐標分別為(48,-4)、(50, 0)、(54,-10)和(57,-2)。
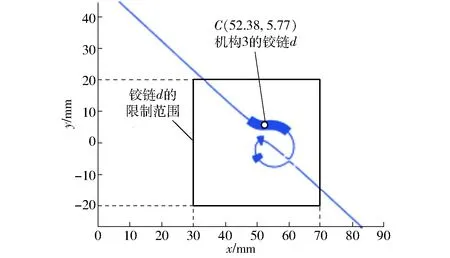
圖8 引入K后的鉸鏈點d解曲線及可行段Fig.8 Solution curve and feasible segments for joint d with parameter K
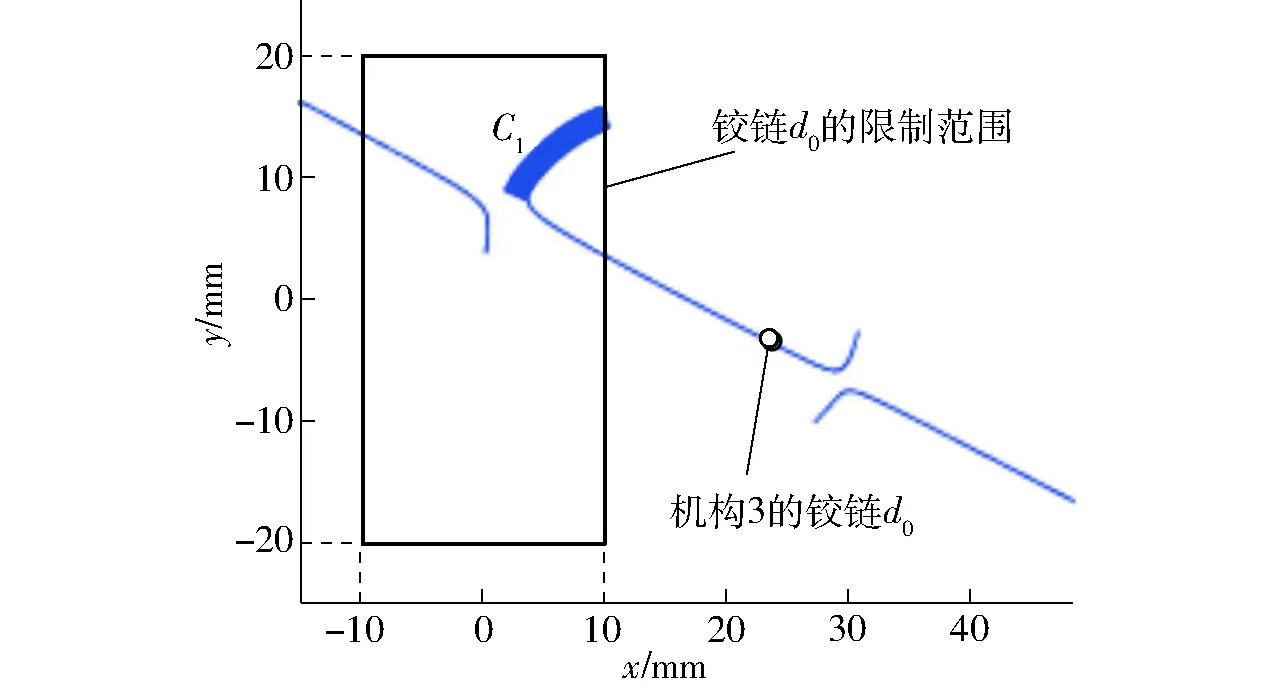
圖9 圖8中取C點得到的鉸鏈d0解曲線及可行段Fig.9 Solution curve and feasible segments for joint d0 corresponding to point C in Fig.8
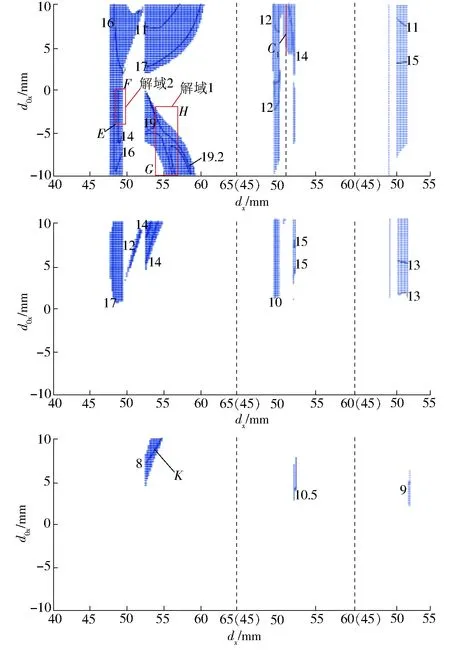
圖10 引入K后的解域Fig.10 Solution region with parameter K
2 機構選擇和設計示例
采用單自由度平面六桿機構進行手指的設計,機構鉸鏈點間的距離可影響手指的外形,因此,K較低的平面六桿機構由于其力學性能較好,可用來設計對力學性能要求高的手指,如康復手指,而鉸鏈間距離較小的平面六桿機構其結構更加緊湊,可用來設計仿生手指等對外形要求高而對力學性能要求較低的手指,但也要考慮結構上能否實現。圖11為3個具有不同外形和K的平面六桿機構。
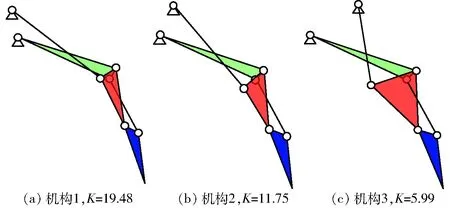
圖11 3個具有不同形狀和K的平面六桿機構Fig.11 Three planar six-bar mechanisms with different shapes and K values
將圖10中的解域1和解域2進行放大,更清楚地顯示機構在解域中的位置,如圖12和圖13分別顯示機構1和機構2在解域中的位置。機構3的鉸鏈d和鉸鏈d0在曲線上的位置分別如圖8和圖9所示。由于機構3的鉸鏈d0在限制范圍外面,因此解域不包含機構3。

圖12 機構1在圖10解域1中的位置Fig.12 Location of mechanism 1 in solution region 1 shown in Fig.10

圖13 機構2在圖10解域2中的位置Fig.13 Location of mechanism 2 in solution region 2 shown in Fig.10
機構2和機構3的K小于機構1的K,而機構1的結構更加緊湊,故機構2和機構3具有較好的力傳遞性能,用于康復手指的設計可更好地幫助人手指的運動康復,而機構1用于設計仿生手指可得到更好的手指外形。本文利用機構1給出仿生手指設計示例,機構1的鉸鏈點坐標如表4所示。
設計出的仿生手指包含3個指節和2個隱藏在內部的連桿。如圖14所示,圖14a為手指外形示意圖,圖14b為手指內部結構。圖15為3D打印樣機示例。圖中手指依次通過4個預定的運動位置,采用1個驅動電機即可驅動該手指。

表4 機構1的鉸鏈點坐標Tab.4 Coordinates of mechanism 1 mm
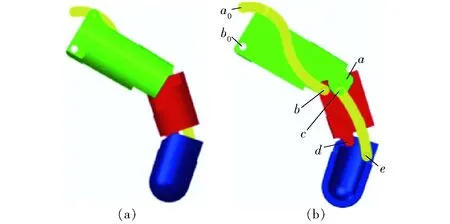
圖14 仿生手指結構Fig.14 Structure of anthropomorphic finger
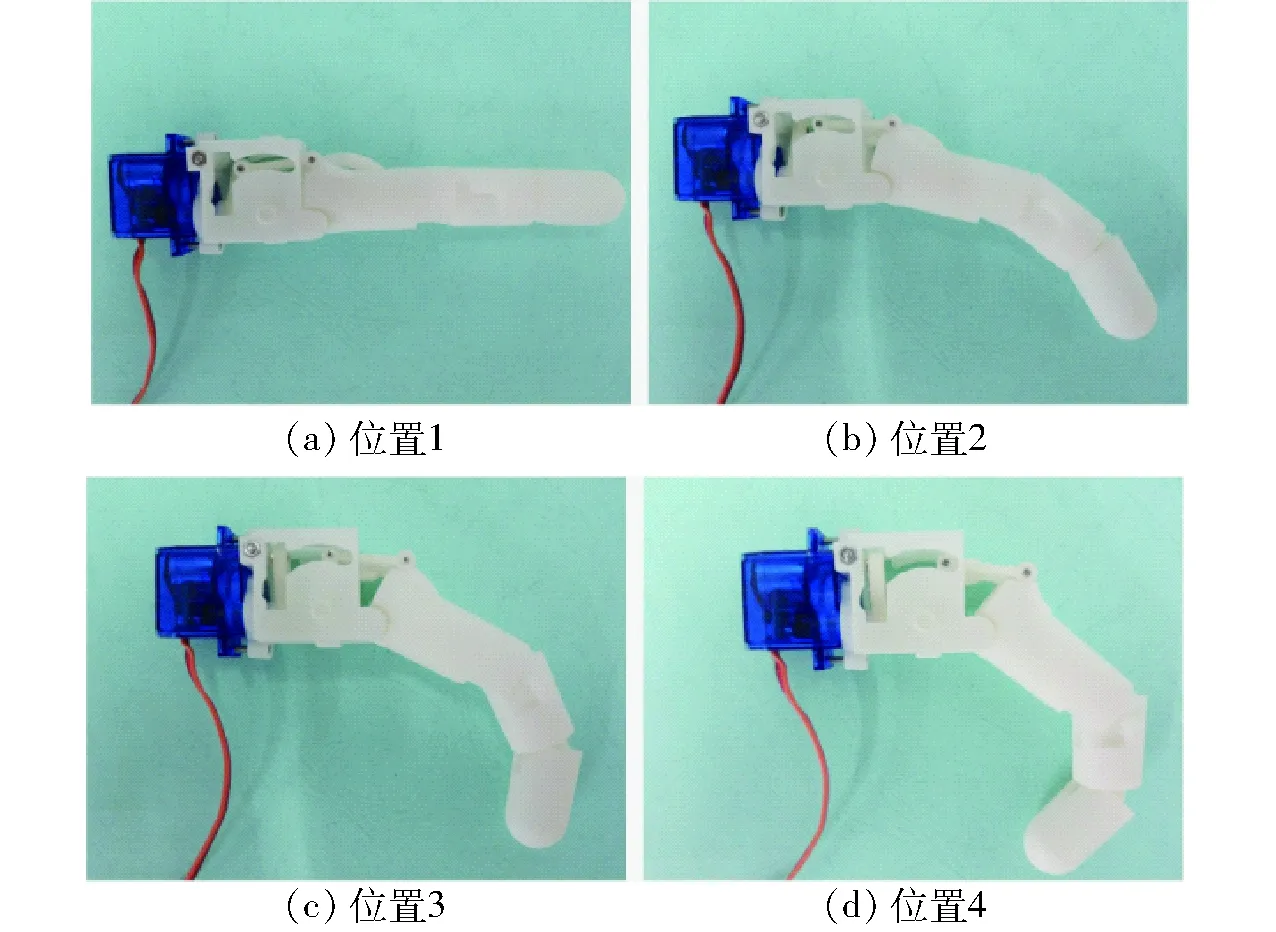
圖15 仿生手指3D打印樣機Fig.15 Prototype of anthropomorphic finger
3 結論
(1)手指虛擬樣機的運動過程能通過給定的4個運動位置,證明設計理論和設計方法是正確有效的。手指樣機能實現預期目標,證明了結構上也是可行的,且能滿足各種性能要求。
(2)采用單個驅動電機即可驅動手指,證明力傳遞性能指標的引入有利于得到具備較好力學性能的機構,并有利于手指功能的實現。解域能給出所有滿足要求的機構解,可根據不同的設計目的選擇合適的結構,滿足機器人手指多尺寸、多用途的設計要求,同時,也為進一步優化手指結構提供了可能。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04