數(shù)字模型全息標識體系與輔助標識方法研究
2018-09-17 06:49:48劉宏新郭麗峰王登宇
農(nóng)業(yè)機械學報 2018年9期
劉宏新 賈 儒 郭麗峰 王登宇
(東北農(nóng)業(yè)大學工程學院, 哈爾濱 150030)
0 引言
機械裝備研發(fā)過程中,通常采用局部創(chuàng)新與功能升級的方式進行適應(yīng)性設(shè)計與改型設(shè)計,產(chǎn)品的更新?lián)Q代一般體現(xiàn)在一個或幾個零部件上。雖然機械裝備的研發(fā)重點在個別零部件及部分核心技術(shù)的創(chuàng)新上,但限于目前的技術(shù)手段,為形成整機的工程圖紙及技術(shù)資料,需要設(shè)計人員反復(fù)查閱手冊并進行大量重復(fù)性勞動,勞動量大且耗時長。隨著計算機技術(shù)的飛速發(fā)展,現(xiàn)代高端三維機械工程軟件為數(shù)字模型的創(chuàng)建和模型資源積累提供了高效平臺,隨之產(chǎn)生了一些樸素的零件庫、標準件庫及行業(yè)通用件庫,但這些庫僅實現(xiàn)了資源的簡單集合與原始復(fù)制,不能提供個性化的設(shè)計與開發(fā)功能。
虛擬裝配技術(shù)是機械裝備研發(fā)過程中的重要環(huán)節(jié),而實現(xiàn)智能化、自動化的虛擬裝配是提高研發(fā)效率的重要途徑,也是實現(xiàn)模型資源組織、共享、重用、智能輔助設(shè)計與選型配套等功能的技術(shù)基礎(chǔ)[1],這就需要構(gòu)建標準化數(shù)字模型資源和數(shù)據(jù)庫,作為實現(xiàn)智能虛擬裝配技術(shù)的模型基礎(chǔ)和信息來源。
國內(nèi)外針對虛擬裝配,對數(shù)字模型及裝配信息的創(chuàng)建進行了廣泛的研究,主要有以下幾種方法:基于約束,因為裝備設(shè)計實際上是基于裝配關(guān)系進行的,而現(xiàn)有三維系統(tǒng)中是通過幾何體元素進行約束,因此研究一種基于約束的裝配信息表達方法[2-4];基于規(guī)則,主要針對產(chǎn)品裝配順序規(guī)劃問題,研究規(guī)則信息表達方法[5-7];基于本體,為了解決傳統(tǒng)數(shù)據(jù)模型難以表達裝配過程復(fù)雜管理和知識表達問題,而創(chuàng)建模型及其表達的方法[8-12];基于知識,為提高設(shè)計質(zhì)量和效率,可將設(shè)計知識共享并重用[13-16];基于語義,為表達裝配信息及裝配關(guān)系,研究的一種表達方法[17-20];基于特征,通過識別裝配中的特征,結(jié)合知識推理實現(xiàn)自動匹配[21-23];基于Web,為實現(xiàn)交互平臺的建模、裝配、干涉檢查等,提出的一種將數(shù)據(jù)進行整體優(yōu)化方法[24-25]。對于具有一定規(guī)模的數(shù)字模型庫,無論運用何種方法創(chuàng)建均存在較大的工作量,而相應(yīng)的輔助標識方法未見有相關(guān)研究。
作者團隊曾研究基于物元標識的人機交互式虛擬裝配,對裝配物元標識做了分析與定義。提出裝配物元的概念,將裝配信息進行語義編碼和標識。只要分析并提取每個零件的裝配物元信息即可構(gòu)建出完整的裝配。創(chuàng)建一種基于裝配物元標識的智能裝配系統(tǒng),標識后的獨立部件總成可利用虛擬裝配系統(tǒng)快速準確地裝配。可實現(xiàn)對裝配語義集的提取與分析,將裝配語義信息轉(zhuǎn)化為裝配約束,引導(dǎo)完成虛擬裝配。為智能虛擬裝配提供先進有效的手段,并為本文的研究奠定基礎(chǔ)[26]。但對于更加復(fù)雜的機械裝備的智能輔助設(shè)計、互換性裝配、系統(tǒng)性擴展與維護,裝配物元標識的數(shù)字模型及其物元信息不能滿足設(shè)計要求,因此需要研究一種高效、規(guī)范且可讀性強的數(shù)字模型全息標識規(guī)則與方法。
綜上所述,本文提出全息標識的概念并研究其體系與輔助標識方法,以實現(xiàn)標識信息的全息化和標準化,為機械裝備數(shù)字模型庫的建立提供快速有效的手段,同時為智能虛擬裝配技術(shù)及其他輔助設(shè)計功能的實現(xiàn)奠定模型及信息基礎(chǔ)。
1 全息標識的定義與流程
為更加系統(tǒng)、規(guī)范、全面地表達數(shù)字模型的基本信息與裝配信息,提出全息標識的概念,這里將全息標識定義為數(shù)字模型實現(xiàn)自動裝配所需的全部信息被完整標記的過程,全息標識體系可為標準化的數(shù)字模型構(gòu)建提供方法和規(guī)則。
規(guī)則化標識和標準化模型可為模型資源的虛擬裝配提供豐富的可重用資源和信息。全面的標識信息與合理的標識流程是人機交互式輔助標識方法的基礎(chǔ)。數(shù)字模型標識流程如圖1所示。
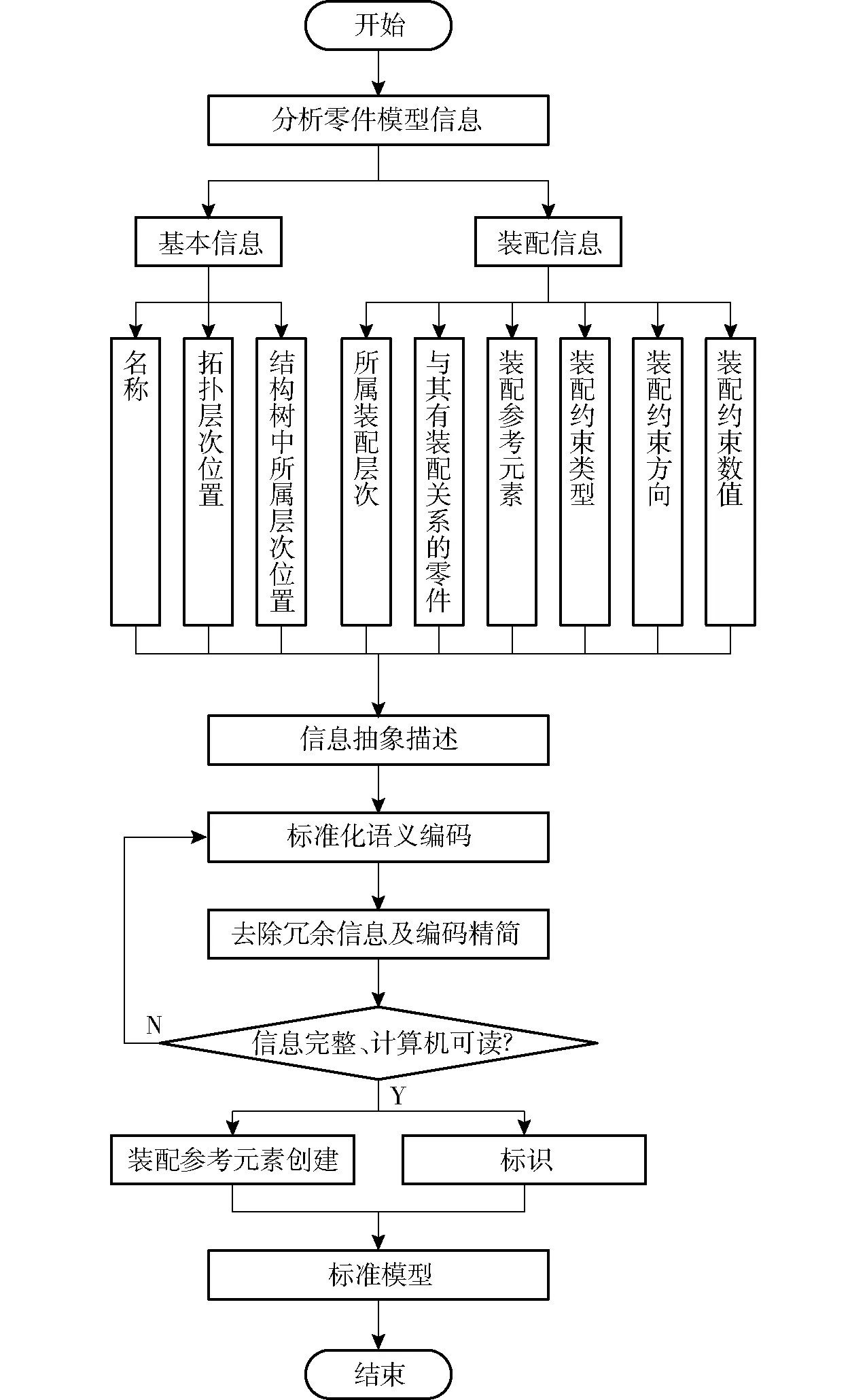
圖1 數(shù)字模型標識流程Fig.1 Digital model identification procedure
2 全息標識結(jié)構(gòu)與規(guī)則
2.1 標識結(jié)構(gòu)與要素
針對裝配基本元素“零件”,研究全息標識結(jié)構(gòu)與要素[26]。分析數(shù)字模型的基本信息和裝配信息,包含數(shù)字模型調(diào)用和虛擬裝配所需的全部要素。基本信息包括零件名稱,零件所屬裝配體在拓撲層次中的位置和在裝配結(jié)構(gòu)樹中零件所屬層次位置3要素。裝配信息包括零件所屬裝配層次、與其有裝配關(guān)系的零件、裝配參考元素、裝配約束類型、裝配約束方向和裝配約束數(shù)值6要素。
為規(guī)范模型資源,同時也為模型資源在虛擬裝配系統(tǒng)中的重用和互換性裝配提供基礎(chǔ),引入裝備譜系的概念,構(gòu)建拓撲層次圖。以精密播種裝備為例,除標準件外,精密播種裝備一般由播種模塊、施肥開溝模塊、覆土鎮(zhèn)壓模塊、機架、仿形機構(gòu)和其他部件組成[27],定義該層次為精密播種裝備的第一拓撲層次。播種模塊的種箱、排種器、種溝開溝器,施肥開溝模塊的肥箱、排肥器、施肥開溝器,覆土鎮(zhèn)壓模塊的覆土器、鎮(zhèn)壓器,其他部件中的傳動件、鏈接緊固件、地輪各零部件單元定義為精密播種裝備的第二拓撲層次,也為基礎(chǔ)拓撲層次,拓撲層次如圖2所示。

圖2 精密播種裝備譜系拓撲層次圖Fig.2 Pedigree topological map of precision seeding equipment
2.2 標識字段及段內(nèi)信息設(shè)置
為清晰表達裝備數(shù)字模型的基本信息和裝配信息,提出基本物元與裝配物元的概念。基本物元定義為零件名稱,零件所處拓撲層次位置,零件在裝配結(jié)構(gòu)樹中所屬層次位置和上一級層次位置的統(tǒng)稱。基本物元以有序的四元組:B=(N,T,S,H)來表達,各要素含義如圖3a所示。基本物元的4要素可以清晰表達零件的基本信息和所屬層次。

圖3 基本物元和裝配物元的要素組成Fig.3 Factors of basic matter-element and assemble matter-element注:要素T主要考慮模型資源的重用和互換功能所定義的;要素H用來獲取裝配層次信息;一個零件可同屬多個裝配層次要素A。
裝配物元定義為零件所屬裝配層次、與其有裝配關(guān)系的零件、裝配參考元素、裝配約束類型、裝配約束方向和裝配約束數(shù)值的統(tǒng)稱。裝配物元以有序的六元組:R=(A,I,E,Y,D,V)來表達,各要素含義如圖3b所示。裝配物元的6要素可完整表達裝配信息。裝配物元又分為基本拓撲層次裝配物元和其他拓撲層次裝配物元,基本拓撲層次裝配物元信息為每個最基本單元內(nèi)部裝配信息,其他拓撲層次裝配物元為最基本單元之間或模塊之間的裝配信息,為數(shù)字模型的重用和替換提供信息基礎(chǔ)。以圖2所示裝備譜系拓撲層次圖為例,其裝配物元可分為基礎(chǔ)拓撲層次裝配物元R0和一級拓撲層次裝配物元R1。
2.3 語義編碼規(guī)則
為使信息計算機可讀,需將基本物元和裝配物元信息抽象為編碼,同時滿足信息表達的完整性、可計算性、規(guī)則的普適性和編碼的精簡性。制定合理高效的語義編碼規(guī)則,并將該規(guī)則作為輔助標識過程快速構(gòu)建標準化模型和標識的規(guī)則。本文針對以計算機輔助三維交互應(yīng)用(Computer aided three-dimensional interactive application,CATIA)為虛擬環(huán)境、Visual Basic為開發(fā)語言和Microsoft Office Access(關(guān)系數(shù)據(jù)庫管理系統(tǒng))為后臺數(shù)據(jù)庫的虛擬裝配和輔助標識,制定物元及語義編碼規(guī)則如表1所示。
為簡化編碼和避免系統(tǒng)無法正確選擇所需參考元素的情況,利用缺省約束類型,自定義裝配參考元素的方法,將三維設(shè)計軟件中全部約束方式在模型創(chuàng)建中均轉(zhuǎn)化為點、軸或線、面之間的相合約束。因此,需要在3D模型中建立相應(yīng)的點、軸或線、面作為裝配參考元素。裝配約束類型Y缺省為相合約束;裝配約束數(shù)值V缺省為無。
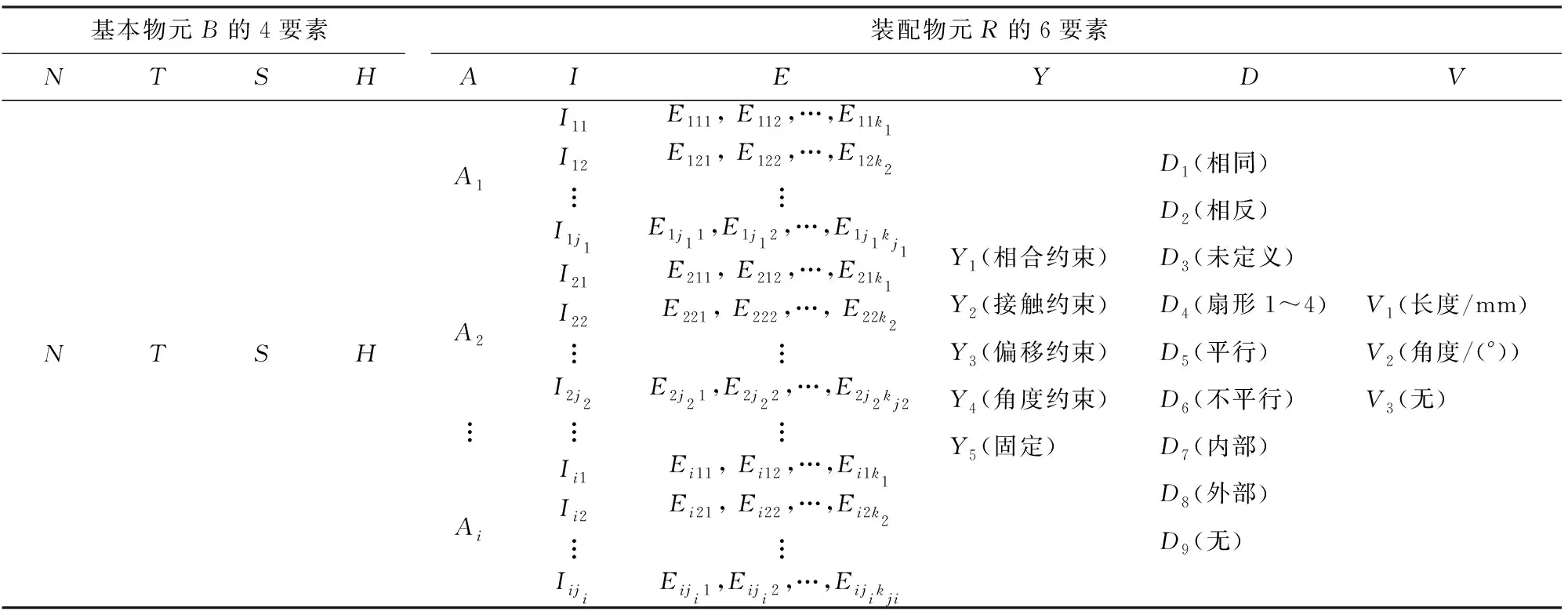
表1 物元及語義編碼規(guī)則Tab.1 Rules of matter-element and semantic encoding
注:i、j、k均為正整數(shù)。

圖4 標識規(guī)則Fig.4 Identification rules注:□表示英文字母,○表示阿拉伯數(shù)字,△表示符號,B表示基本物元。
2.4 物元標識規(guī)則
為使全部信息充分有效地存儲、組織、管理和應(yīng)用,利用Microsoft Office Access創(chuàng)建智能虛擬裝配及其輔助標識系統(tǒng)的數(shù)據(jù)庫。
將包含信息的編碼以一定的規(guī)則標識,即可完成數(shù)字模型全息標識。在完整而有效地表征語義編碼信息的同時,保證程序易于提取。基本物元B的4要素N、T、S、H的標識規(guī)則如圖3a所示,分別標識在零件文件名和數(shù)據(jù)庫中;基礎(chǔ)拓撲層次裝配物元R0的要素A和I標識規(guī)則如圖4a所示,標識在數(shù)據(jù)庫中;基礎(chǔ)拓撲層次裝配物元R0的要素E標識規(guī)則如圖4b所示,為使兩個有裝配關(guān)系的參考元素具有相同的標識名稱,將N和Iiji的編碼以順序排序,標識在自定義的裝配參考元素的名稱中;其他拓撲層次裝配物元的要素E標識規(guī)則如圖4c所示,與其他拓撲層次裝配物元的其他要素均標識在數(shù)據(jù)庫中。
物元T可用于定位裝配體在譜系拓撲層次圖中的位置,為模型調(diào)用和同一拓撲層次裝配體的互換裝配提供編碼信息;物元S、H兩項編碼為裝配體的裝配層次和零件在裝配中所屬層次提供信息;分隔符1“_”與分隔符2“!”利于程序識別和計數(shù);裝配物元R0的物元A、I、E為最基本單元內(nèi)部裝配信息的編碼;其他拓撲層次裝配物元的要素E的編碼,即單元或模塊間的裝配信息為智能虛擬裝配系統(tǒng)默認,標識在數(shù)據(jù)庫中,以實現(xiàn)模型重用、選型和互換裝配。
3 輔助標識方案與技術(shù)流程
利用上述方法標識的數(shù)字模型結(jié)合系統(tǒng)數(shù)據(jù)庫,為智能虛擬裝配系統(tǒng)提供模型資源和裝配信息,也為數(shù)字模型的標準化構(gòu)建及標識過程提供規(guī)則。但對于具有一定規(guī)模的數(shù)字模型庫的標準化標識工作十分繁重,因此,提出一種數(shù)字模型輔助標識方法,通過人機交互的方式,以上述全息標識規(guī)則和方法為基準,創(chuàng)建裝配參考元素并自動標識。輔助標識方法的實現(xiàn)不僅為減輕系統(tǒng)設(shè)計者的工作量提供有效工具,同時也為用戶對模型庫的自定義擴充提供基本條件。
輔助標識方法的初始研究對象為任何一般裝配體,通過對裝配體裝配信息的分析與提取,以人機交互的形式實現(xiàn)模型的標準化物元標識和裝配參考元素的創(chuàng)建,快速完成標準化數(shù)字模型的夠建,流程如圖5所示,主要分為信息提取、信息轉(zhuǎn)化和信息標識3個階段。
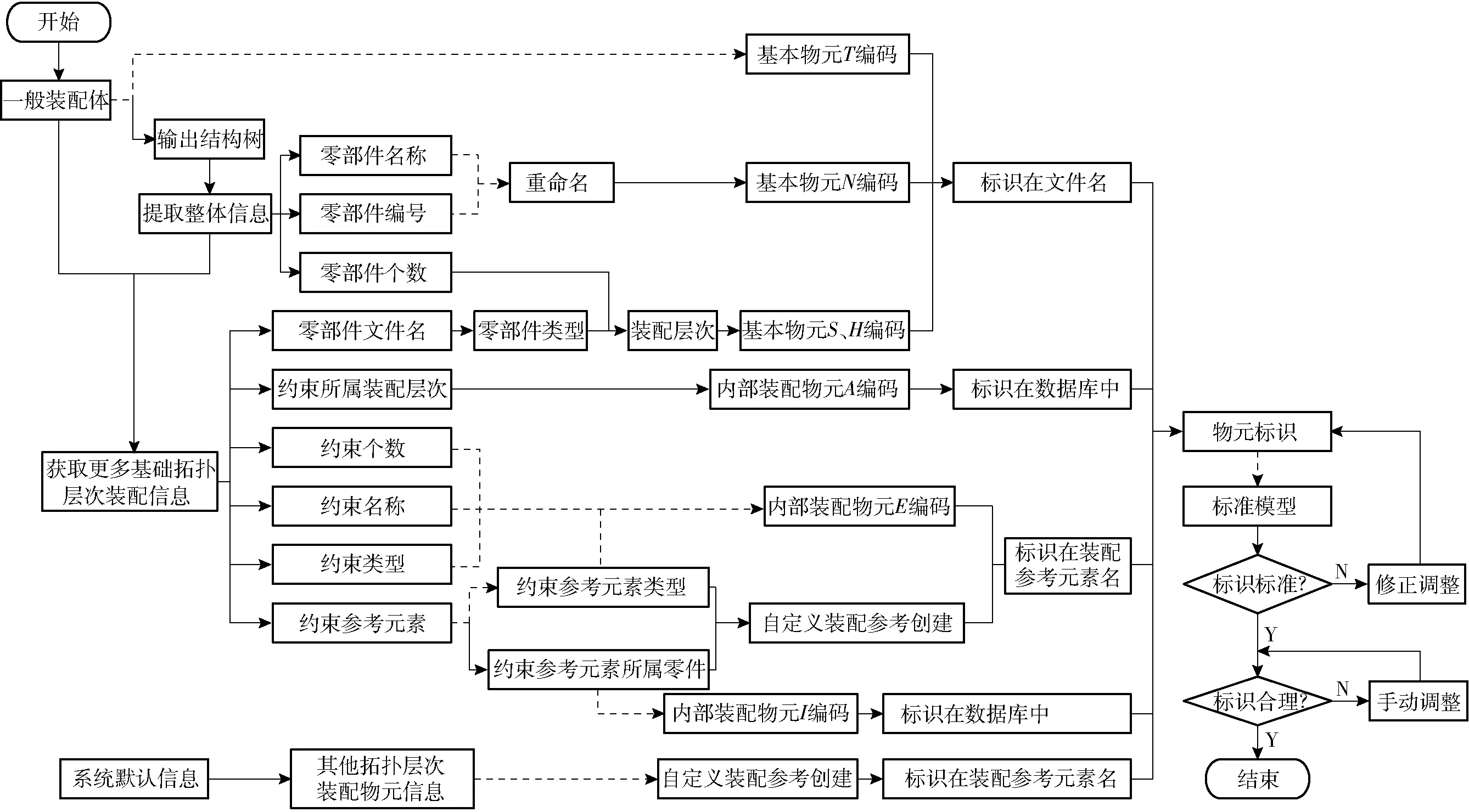
圖5 模型輔助標識流程Fig.5 Model intelligent auxiliary identification procedure注:實線表示系統(tǒng)自動完成,虛線表示人機交互完成。
通過輸出“txt”格式裝配模型結(jié)構(gòu)樹獲取裝配模型零部件個數(shù)、實例名稱和零件編碼等基本信息,輸出的文本文檔作為臨時文件,獲取信息后即可刪除,此種方法相較于在模型結(jié)構(gòu)樹中逐級分析探索更加高效;通過人機交互形式,確定裝配體所屬拓撲層次作為基本物元T編碼,確定裝配體中文名稱以便在系統(tǒng)內(nèi)調(diào)用和查看,并按規(guī)則重命名全部零部件,作為基本物元N編碼;利用獲取的零部件個數(shù)和名稱等信息,遍歷裝配模型結(jié)構(gòu)樹,獲取裝配約束信息,并將信息轉(zhuǎn)化為物元編碼,必要時利用人機交互界面,補充無法智能識別信息,得到基本物元B和基本拓撲層次裝配物元R0信息;根據(jù)編碼及標識規(guī)則,創(chuàng)建裝配參考元素,并進行標識;單元或模塊之間的其他拓撲層次裝配信息及標識均為系統(tǒng)默認,需將該裝配體相應(yīng)的名稱信息標識在數(shù)據(jù)庫中,根據(jù)人機交互界面引導(dǎo)創(chuàng)建裝配參考元素并進行標識。
4 模型信息提取、轉(zhuǎn)化與標識
CATIA進程外開發(fā)方式最主要的有2種方法,一種是開放的基于構(gòu)件的應(yīng)用編程接口組件應(yīng)用架構(gòu)(Component application architecture,CAA)技術(shù),另一種是自動化對象編程CATIA Automation技術(shù)[28]。本文利用自動化對象編程CATIA Automation技術(shù),以交互方式進行定制開發(fā),此種方法相較于CAA技術(shù)更加簡單。在CATIA Automation中,所有的數(shù)據(jù)都被封裝成了對象的形式,并形成建模時常見的逐層包含的樹狀結(jié)構(gòu)。Application(應(yīng)用)是根對象,下面又派生出許多子對象。每一個對象都有其操縱集合的方法和屬性。本文所用到的對象之間的結(jié)構(gòu)關(guān)系如圖6所示[29]。
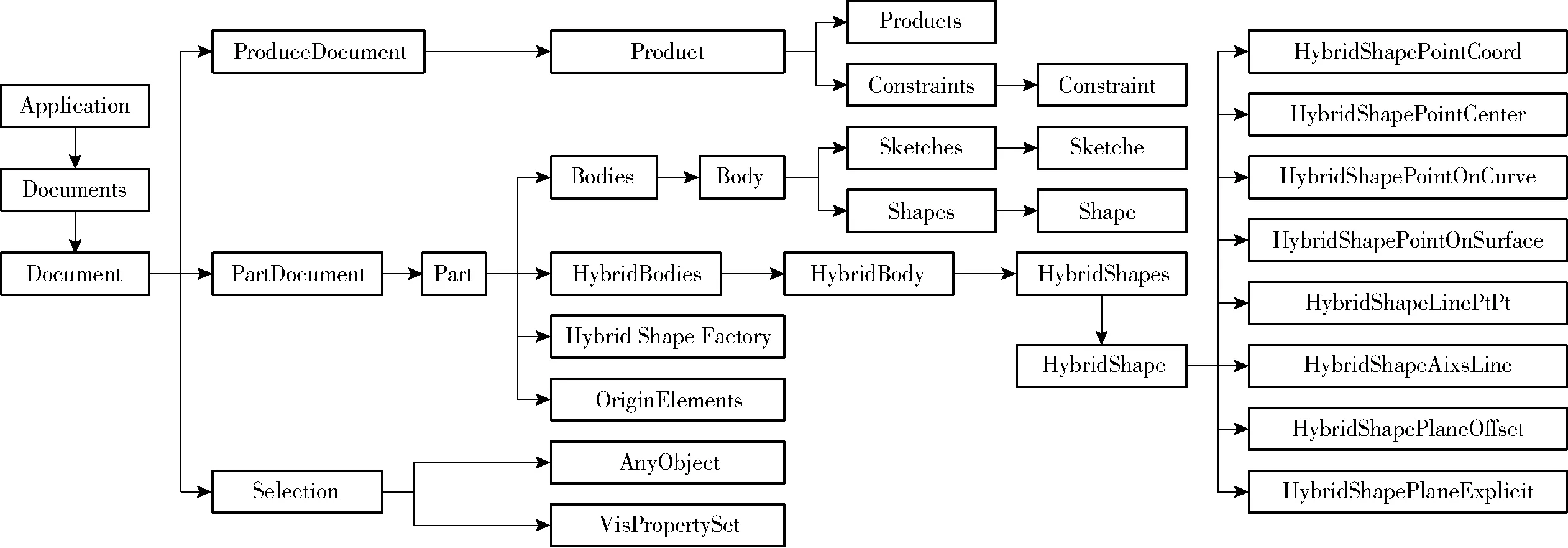
圖6 CATIA文檔結(jié)構(gòu)Fig.6 CATIA document structure
利用CreateObject方法訪問CATIA,代碼為[30]
CATIA=CreateObject(“CATIA.Application”)
4.1 信息提取
輸出結(jié)構(gòu)樹、獲取零部件文件名和獲取約束類型均為系統(tǒng)后臺完成過程,其他提取步驟需結(jié)合人機交互界面完成。輔助標識的初始狀態(tài)設(shè)定對話框如圖7所示。
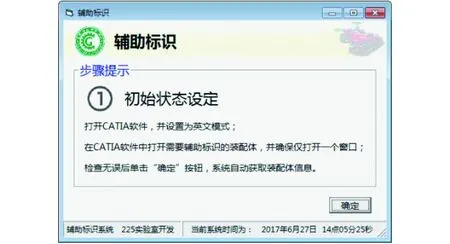
圖7 初始狀態(tài)設(shè)定對話框Fig.7 Dialog box of initial state setting
4.1.1結(jié)構(gòu)樹輸出
利用ProductDocument(產(chǎn)品文檔)對象的ExportData(輸出數(shù)據(jù))方法快速輸出裝配模型結(jié)構(gòu)樹,語句為[31]
oProductDocument.ExportData(iFileName, iFormat)
其中,iFileName為輸出文件名(包括完整路徑),iFormat為輸出格式類型。本文輸出格式類型定義為“txt”。
利用文本格式的結(jié)構(gòu)樹信息,可快速獲取零部件個數(shù)、實例名稱和零件編碼,為遍歷結(jié)構(gòu)樹和準確獲取更多裝配信息提供基礎(chǔ)信息。提取信息后,利用Kill語句從磁盤中刪除該文本文件。
4.1.2零部件文件名(含擴展名)獲取
利用當前活動文檔CATIA.ActiveDocument對象的GetItem(獲取項目)方法返回AnyObject(任何對象)對象類型,其語句為[29]
oAnyObject= CATIA.ActiveDocument. GetItem(IDName)
其中,IDName為零部件編碼。
利用AnyObject對象的Parent(父級)屬性獲取零部件文件名(含擴展名),進而獲得零部件的類型,確定裝配模型的層次關(guān)系,即可確定基本物元B的要素S、H。
4.1.3重命名
通過人機交互的方式,輸入零部件的基本物元B的要素N的編碼,這里規(guī)定編碼由3位英文字母或數(shù)字組成。將編碼賦值給Product(產(chǎn)品)對象的PartNumber(零件編碼)屬性定義其零件編碼,并賦值給Product對象的Name(名稱)屬性定義其實例名稱,即可得到基本物元B的要素N。交互界面如圖8所示。

圖8 重命名對話框Fig.8 Dialog box of rename
如單擊“默認”按鈕,按照自定義的阿拉伯數(shù)字編碼方式對零部件進行重命名。需注意該方法因命名規(guī)則的限制,裝配體所允許的零件數(shù)量有上限值。
4.1.4譜系拓撲層次及中文名稱確定
通過人機交互界面選擇裝配體所處譜系拓撲層次,即可得到基本物元B的要素T,并輸入裝配體中文名稱,以便模型在系統(tǒng)中的檢索與重用,交互界面如圖9所示。
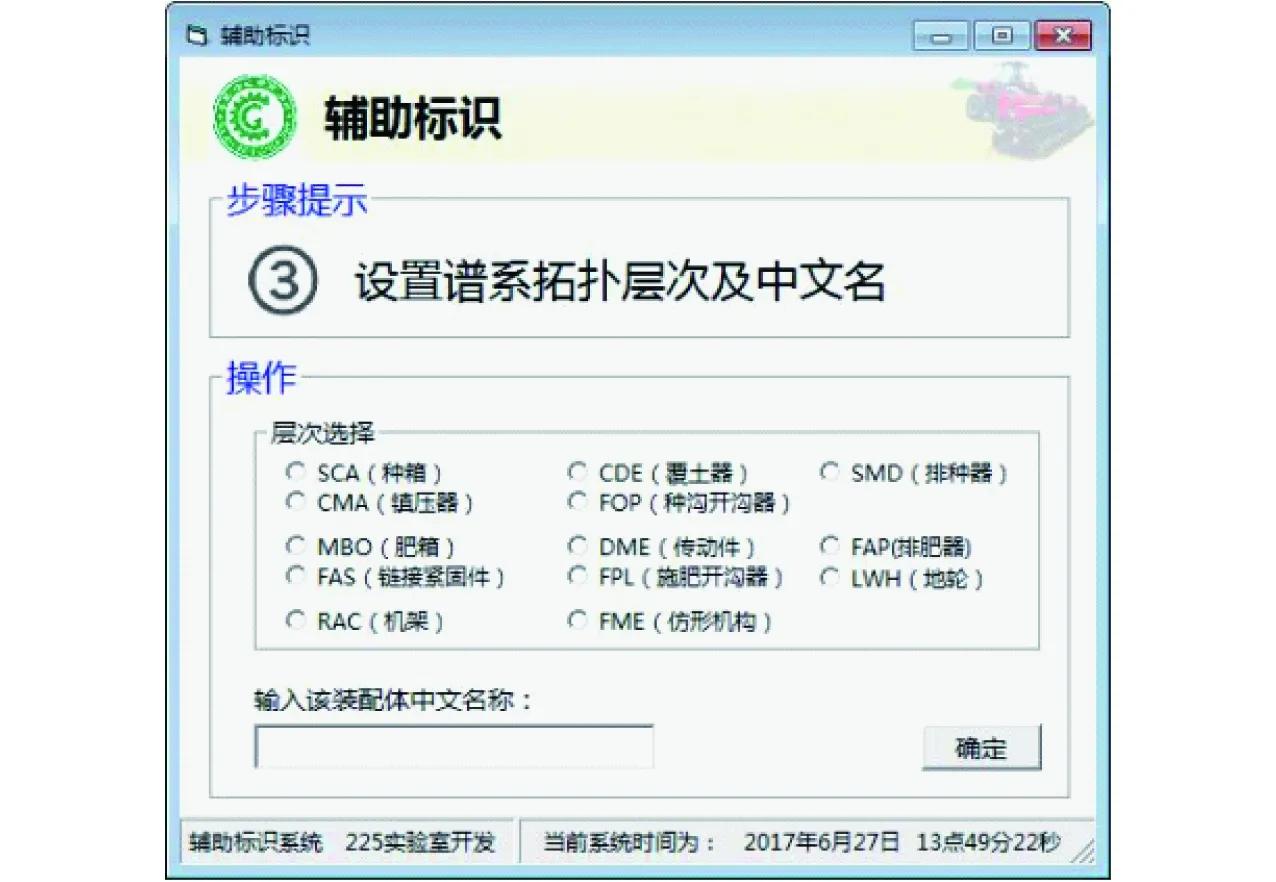
圖9 設(shè)置譜系層次及標識對話框Fig.9 Dialog box of spectrum level setting and identification
根據(jù)基本物元B標識規(guī)則(圖3a)即可得到物元B的編碼。
4.1.5約束信息獲取
約束信息包括:不同裝配層次的約束個數(shù),約束名稱,約束類型和約束參考元素。
根據(jù)得到的基本信息和裝配層次信息,利用Constraints(約束)對象的Count(數(shù)量)屬性獲取各裝配層次的約束個數(shù)。
利用Constraints對象的Item(項目)方法遍歷各裝配層次的全部約束Constraint(約束)對象,返回類型為Constraint,語句為[31]
oConstraint=oConstraints.Item(iIndex)
其中,iIndex為約束集合中對象的名稱或順序號,本文順序號根據(jù)獲取的約束個數(shù)確定。
分別利用Constraint對象的Name和Type(類型)屬性獲取約束名稱和種類。
利用Constrain對象的GetConstraintElement(獲取約束元素)方法獲取裝配參考元素,返回類型為Reference,語句為[31]
oReference=oConstraint. GetConstraintElement(iElementNumber)
其中,iElementNumber為裝配參考元素順序號,一般一個約束包含2個參考元素,因此本文中iElementNumber分別為“1”和“2”。
利用Reference(參考)對象的DisplayName(顯示名稱)屬性獲取參考的GenericNaming label(通用命名標識)。GenericNaming label中包含信息有:參考所屬零件名稱和路徑,參考元素類型,參考元素名稱等。
4.2 信息轉(zhuǎn)化與標識
4.2.1裝配參考元素類型及所屬零件確定
通過獲取參考元素的GenericNaming label,可確定部分裝配約束參考元素類型及其所屬零件名稱。參考類型包括:實體上端點,線端點,草圖點,球心,實體邊線,實體軸線,草圖線,實體面,基準平面等。以軸線為例,軸與隔板之間的一個軸線相合約束中,軸的裝配參考元素的GenericNaming label為:DCV/RAX/SHA/!Axis: (Selection_RSur:(Face:(Brp:(Shaft.1;0:(Brp:(Sketch.1;16)));None:();Cf11:());Pocket.3_ResultOUT;Z0;G4074)),通過類型信息“!Axis:(Selection_RSur:”可知裝配參考元素類型為實體的軸線,并可確定該裝配參考元素所屬零件名稱為“SHA”。結(jié)合裝配模型的層次關(guān)系和基礎(chǔ)拓撲層次裝配物元R0的要素A和I標識規(guī)則(圖4a),即可確定基礎(chǔ)拓撲層次裝配物元R0的要素A和I的編碼,該編碼標識在系統(tǒng)數(shù)據(jù)庫中。
但自定義創(chuàng)建的點、線、面和某些曲面無法通過該路徑名稱判斷類型,需要人工判斷,交互界面如圖10所示,并設(shè)置被判斷的參考元素高亮顯示以便快速判斷類型。
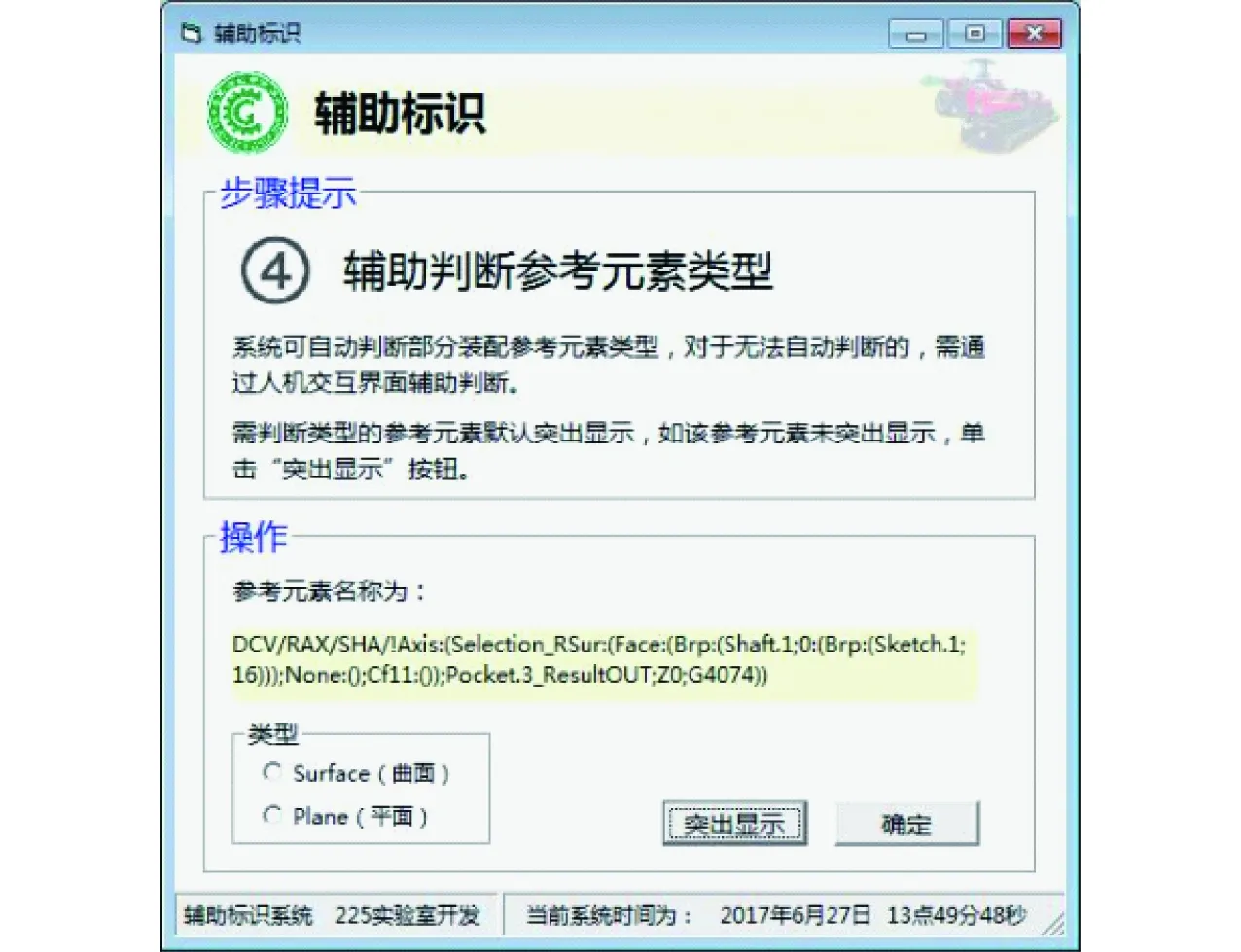
圖10 判斷參考元素類型對話框Fig.10 Dialog box of reference element type determination
利用Selection(選集)對象的Add(添加)方法,將裝配參考元素對象加入集合中,以實現(xiàn)參考元素高亮顯示功能,語句為[29]
oSelection.Add(iObject)
其中,iObject為任何對象,類型為AnyObject對象。
利用約束關(guān)系和約束參考元素所屬零件等信息,根據(jù)基礎(chǔ)拓撲層次裝配物元R0的要素E標識規(guī)則(圖4b),可得到物元E編碼。
4.2.2裝配約束轉(zhuǎn)化規(guī)則
手動創(chuàng)建裝配參考元素時,可人為判定參考類型和創(chuàng)建位置等,利用計算機自動轉(zhuǎn)化和創(chuàng)建裝配參考元素時,則需要制定相應(yīng)的轉(zhuǎn)化規(guī)則,根據(jù)約束類型和裝配參考元素類型確定轉(zhuǎn)化方式。
對于某一約束的兩個裝配約束參考元素,轉(zhuǎn)化規(guī)則主要分3種:兩裝配約束參考元素的類型均不改變,如相合約束的參考元素轉(zhuǎn)化,均以原參考元素作為基準建立新的參考元素;兩裝配約束參考元素的類型改變一個,如偏移約束的參考元素轉(zhuǎn)化,不變元素以原參考元素作為基準建立新的參考元素,改變元素以不變元素作為基準建立新的參考元素;兩裝配約束參考元素的類型均改變,如曲面和曲面之間的接觸約束,獲取一個曲面上的一點作為新的參考元素,以該點作為基準建立另一點參考元素。忽略固定約束,手動創(chuàng)建參考元素時可定義全部平面與平面之間的相合約束的方向為相反,但根據(jù)上述規(guī)則,利用輔助技術(shù)創(chuàng)建時,兩個裝配參考元素中一參考元素需要以另一參考元素為基準創(chuàng)建的情況,則裝配方向需定義為相同,其他情況定義為相反。
以原始參考元素為實體上邊線為例,不改變參考元素類型,在創(chuàng)建自定義裝配參考元素時可以先創(chuàng)建直線上兩個不同點,以這兩點為參考創(chuàng)建直線。利用HybridShapeFactory(混合形狀工廠)對象的AddNewPointOnCurveFromDistance(在曲線上按距離添加新的點)方法在曲線或直線上創(chuàng)建點,語句為[29]
oHybridShapePointOnCurve=oHybridShapeFactory. AddNewPointOnCurveFromDistance( iCrv, iLong, iOrientation)
其中,iCrv為參考曲線或直線,對象類型為Reference;iLong為相對曲線長度的比例;iOrientation為布爾值,當定義為True時,相對曲線長度的比例從曲線的另一方向測量,反之,從曲線默認方向測量。返回對象類型為HybridShapePointOnCurve(在曲線上的混合形狀點)。
利用HybridShapeFactory對象的AddNewLinePtPt(通過兩點添加新的線)方法以兩點為參考創(chuàng)建直線,語句為[29]
oHybridShapeLinePtPt=oHybridShapeFactory.AddNewLinePtPt(iPtOrigine, iPtExtremite)
其中,iPtOrigine為直線起點,即參考點1,對象類型為Reference;iPtExtremite為直線終點,即參考點2,對象類型為Reference。返回對象類型為HybridShapeLinePtPt(通過兩點的混合形狀線)。
利用HybridShapeFactory對象的不同方法創(chuàng)建相應(yīng)的參考元素,具體代碼如表2所示。根據(jù)創(chuàng)建參考元素方法,確定裝配約束的參考元素轉(zhuǎn)化規(guī)則如表3所示。

表2 混合形狀工廠(HybridShapeFactory)對象創(chuàng)建參考元素方法及返回對象類型Tab.2 Method of hybrid shape factory object to create a reference elements and types of return objects
以一個參考元素為基準創(chuàng)建的另一參考元素,需要以人機交互形式輔助創(chuàng)建,以創(chuàng)建面對話框為例,如圖11所示,按照對話框提示創(chuàng)建面,系統(tǒng)可輔助判斷要創(chuàng)建的零件對象和參考基準,并在創(chuàng)建完成參考面后自動完成標識。通過定義參考元素的Name屬性標識基礎(chǔ)拓撲層次裝配物元R0的要素E。
4.2.3其他拓撲層次裝配物元標識
其他拓撲層次裝配物元的參考創(chuàng)建,根據(jù)人機交互界面的提示步驟選擇參考所屬零件,以輸入數(shù)字模型在系統(tǒng)中的對應(yīng)關(guān)系,并手動創(chuàng)建參考,系統(tǒng)自動標識,交互界面如圖12所示。
從數(shù)據(jù)庫中提取其他拓撲層次裝配物元的要素E編碼,通過定義參考元素的Name屬性自動標識其他拓撲層次裝配物元的要素E。最后自動保存全部零部件,分別利用PartDocument(零件文檔)和ProductDocument對象的SaveAs(另存為)方法,以基本物元B編碼命名,將全部零部件數(shù)字模型保存在模型庫中,完成全息標識。
5 輔助標識方法測試與體系功能
以某播種單元部裝數(shù)字模型為測試對象[32]。分別通過手動標識和輔助標識方式對雙腔立式圓盤復(fù)合機械式排種器的數(shù)字模型進行標識,并將兩模型資源導(dǎo)入標準化模型庫,對比兩種方式構(gòu)建模型的不同;在基于全息標識體系的智能虛擬裝配系統(tǒng)中,自動裝配利用輔助標識的排種器數(shù)字模型,以驗證輔助標識方法的有效性和模型的可用性;用立式淺盆型種盤排種器替換播種單元部件中原有的雙腔立式圓盤復(fù)合機械式排種器,以驗證全息標識體系的有效性。播種單元部裝、雙腔立式圓盤復(fù)合機械式排種器及立式淺盆型種盤排種器數(shù)字模型如圖13所示,雙腔立式圓盤復(fù)合機械式排種器和立式淺盆型種盤排種器主要區(qū)別為排種盤形式不同,從而導(dǎo)致充種方式不同[32-34]。
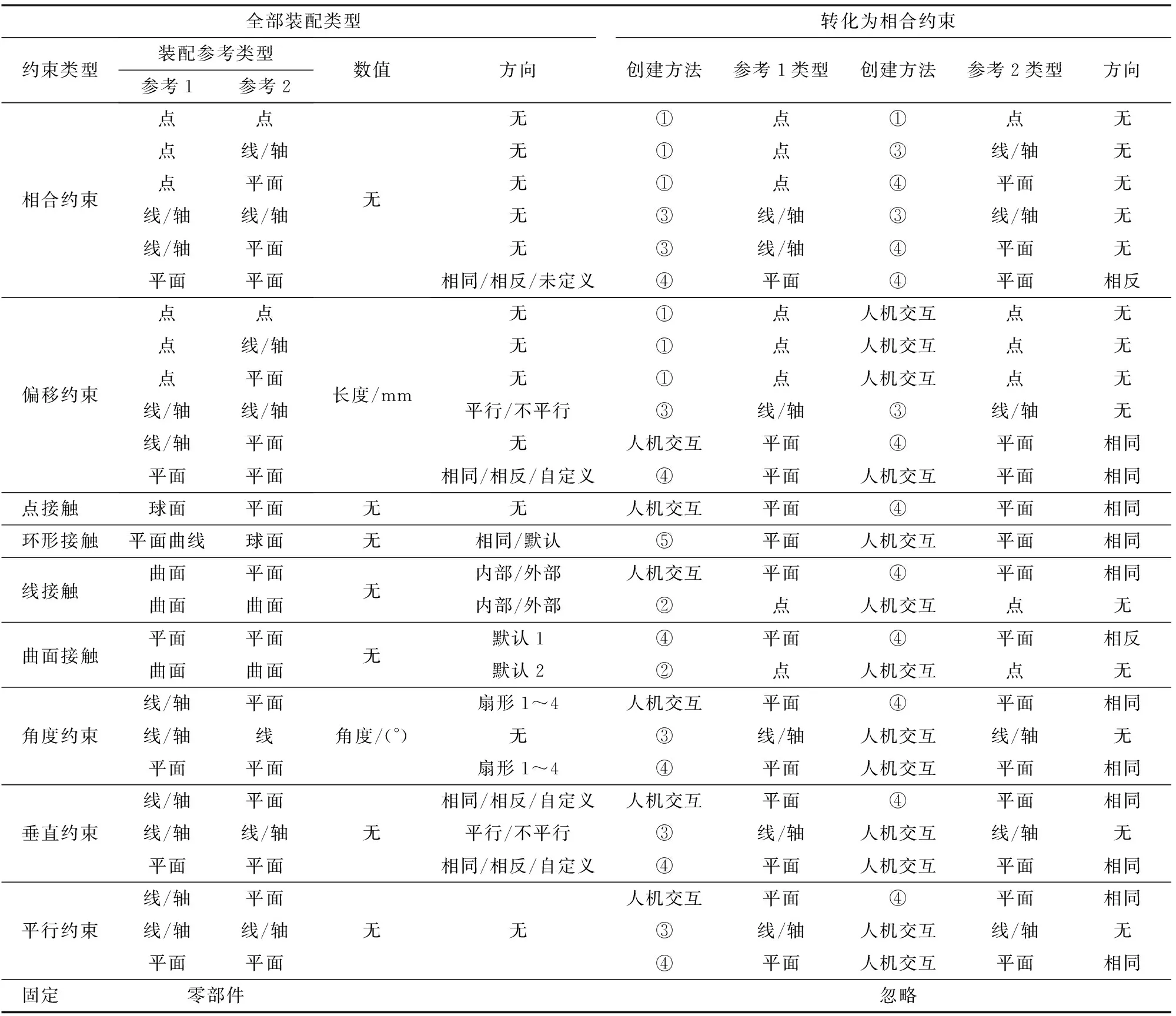
表3 裝配約束的參考元素轉(zhuǎn)化規(guī)則Tab.3 Transformation rules of reference elements of assembly constraints
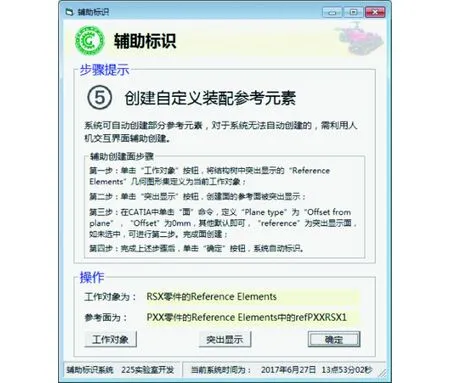
圖11 創(chuàng)建面參考元素對話框Fig.11 Dialog box of surface reference elements creation

圖12 其他拓撲層次裝配參考定義及標識對話框Fig.12 Dialog box of assembly references definition and identification of other topology hierarchy

圖13 數(shù)字模型Fig.13 Digital model1.連體前座架 2.平行四桿機構(gòu) 3.后復(fù)合座架 4.施肥開溝器 5.排種器 6.種溝開溝器 7.覆土器 8.鎮(zhèn)壓輪
5.1 輔助標識方法測試
初始研究對象為雙腔立式圓盤復(fù)合機械式排種器裝配模型,由于模型裝配約束創(chuàng)建有多種不同組合方式,這里要求盡可能按照排種器實際裝配情況進行約束。對兩個完全相同的裝配模型分別進行手動標識和輔助標識,手動標識模型嚴格按照物元編碼及標識規(guī)則創(chuàng)建裝配參考元素和手動標識,輔助標識模型通過輔助標識方法創(chuàng)建裝配參考元素和自動標識,結(jié)果表明兩種方式獲得的模型標識及自定義裝配約束參考元素基本相同,但利用輔助標識方法構(gòu)建標準數(shù)字模型效率顯著提高。以有25個零件的雙腔立式圓盤復(fù)合機械式排種器的數(shù)字模型為例,手動標識過程約需5 h,輔助標識僅需15~20 min,最高節(jié)約時間95%。
以右殼體為例,利用手動標識和輔助標識兩種方式標識的模型基本相同,僅裝配參考元素創(chuàng)建順序、類型和標識編碼順序不同,模型及裝配參考元素標識如圖14所示。手動標識物元R0的要素A和I的其中一種可能為:RSA!ROB3!RIW3!RPS3_DCV!PXX1!SHA1!LS X3,輔助標識物元R0的要素A和I為RSA!RIW3!ROB3!RPS3_DCV!LSX3!PXX1!SHA1,物元B標識均為RSXSMDRSADCV。其中,“RSX”為右殼體名稱編碼;“SMD”為所屬的排種器拓撲層次編碼;“RSA”為右殼體在結(jié)構(gòu)樹中所在的右殼體裝配層次編碼;“DCV”為右殼體裝配的上級層次—總裝配編碼;“RPS3”表示右護種板與右殼體之間有3個裝配約束,其他以此類推。編碼順序的不同不影響虛擬裝配系統(tǒng)對信息的解讀和裝配約束的建立。
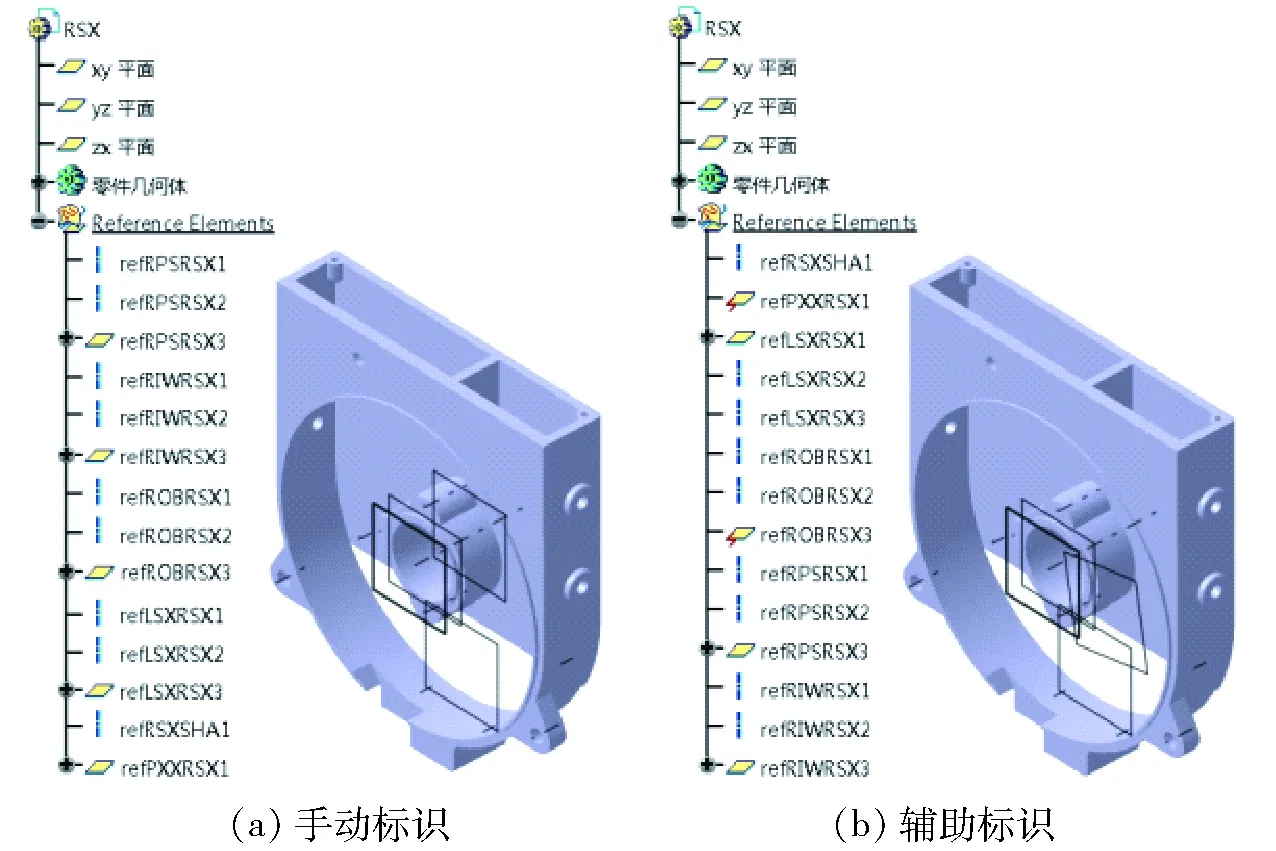
圖14 右殼體模型標識Fig.14 Right shell model identification
由于在雙腔立式圓盤復(fù)合機械式排種器的初始裝配模型中,裝配參考元素類型均為線與線、面與面,兩種方式標識的模型基本相同。為研究兩種標識方式的差異與不同對模型標識的影響,以鍵相對于隔板軸向定位約束為例,改變該定位的約束方式,并選擇不同裝配約束參考元素類型,原約束為鍵與隔板之間的曲面接觸約束,如圖15所示。分別以線與平面之間的偏移約束、線與平面之間的角度約束和點與線之間的偏移約束分別作為鍵的定位約束,分析原始模型裝配參考元素,手動創(chuàng)建裝配參考元素和輔助創(chuàng)建裝配參考元素之間的區(qū)別,如表4所示。
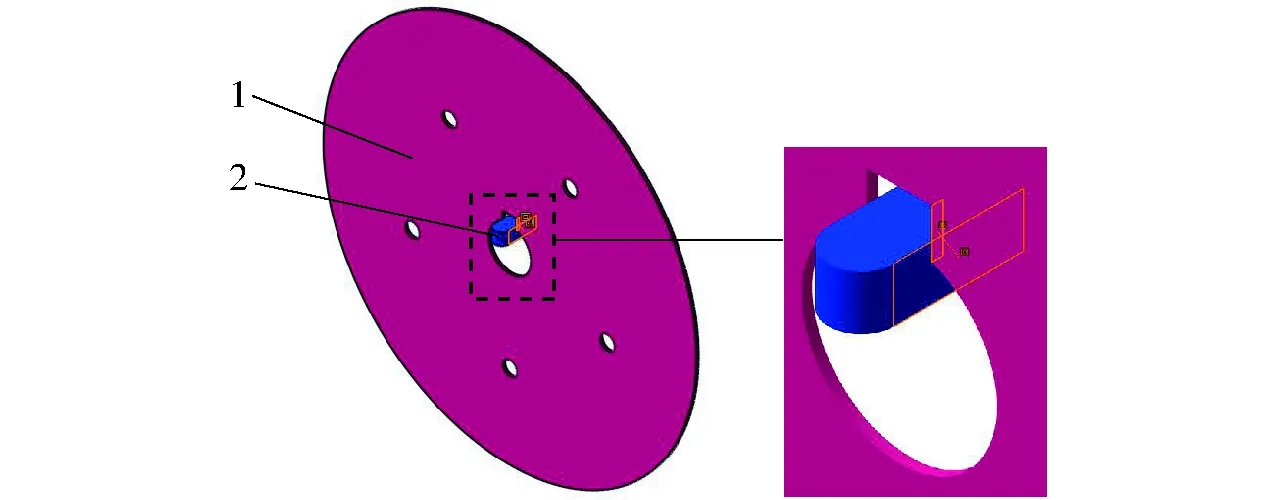
圖15 鍵的軸向位置定位的曲面接觸約束Fig.15 Surface contact constraint of axial position location of key1.隔板 2.鍵
對比結(jié)果顯示,由于創(chuàng)建規(guī)則的不同,導(dǎo)致手動創(chuàng)建方法和輔助創(chuàng)建方法創(chuàng)建裝配參考元素的類型不同。
表4裝配參考元素比較
Tab.4Comparisonofassemblyreferenceelements


圖16 智能裝配系統(tǒng)測試Fig.16 Test of intelligent assembly system1.雙腔立式圓盤復(fù)合機械式排種器 2.立式淺盆型種盤排種器
5.2 標識體系功能測試
將兩種方法標識的排種器模型均導(dǎo)入標準化模型庫,利用基于全息標識體系的智能虛擬裝配系統(tǒng)(圖16a)進行自動裝配[26]。測試結(jié)果表明,兩種方式標識的數(shù)字模型均能通過智能虛擬裝配系統(tǒng)正確、快速地自動裝配,雖然裝配參考元素類型和編碼順序不同,但均可達到預(yù)期裝配結(jié)果。
利用智能虛擬裝配系統(tǒng)的替換功能將雙腔立式圓盤復(fù)合機械式排種器替換為立式淺盆型種盤排種器。交互界面如圖16b所示,替換后模型如圖16c所示。智能虛擬裝配系統(tǒng)的替換功能,對于已經(jīng)進行參數(shù)化設(shè)計的零部件可自動替換和參數(shù)化變型;對于未進行參數(shù)化設(shè)計的部件,可通過自動測量實現(xiàn)部件裝配[35]。測試結(jié)果表明利用全息標識方法標識的模型可順利實現(xiàn)模型的替換,核心部件替換后與其相關(guān)聯(lián)的附屬零部件自動進行適應(yīng)性調(diào)整與變化,以保證整個作業(yè)單元滿足農(nóng)藝要求的工作參數(shù)不變,該單元與核心部件有關(guān)的主要工作參數(shù)為圖16c所示的“播深”。
6 結(jié)論
(1)全息標識規(guī)則及方法可以適用于機械裝備數(shù)字模型資源的標識。“基本物元”加“裝配物元”的表達方式能夠完整且唯一地描述產(chǎn)品所有零件的基本信息和裝配關(guān)系,全面、準確且精簡的全息標識體系是輔助標識方法有效性和可行性的基礎(chǔ)。
(2)基于全息標識體系的數(shù)字模型輔助標識方法充分利用雙向交互信息,智能解讀裝配信息,實現(xiàn)模型快速標識,極大提高資源化處理效率,為數(shù)字化設(shè)計專家系統(tǒng)中裝備數(shù)字模型庫的建立奠定了技術(shù)基礎(chǔ),同時也為用戶自定義擴充模型提供技術(shù)手段。
(3)利用GenericNaming label中關(guān)鍵詞判斷裝配參考元素類型,及HybridShapeFactory對象創(chuàng)建自定義裝配參考元素的方式。該方式可行且高效,但由于裝配參考元素的復(fù)雜性,其全面性需繼續(xù)探索和補充。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
Coco薇(2017年11期)2018-01-03 20:59:57
中華手工(2017年2期)2017-06-06 23:00:31
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
光學精密工程(2016年6期)2016-11-07 09:07:19
中外會展(2014年4期)2014-11-27 07:46:46