考慮柔性懸架的輪式自行火炮仿真分析
2018-09-17 09:26:56劉昕運(yùn)馬吉?jiǎng)?/span>
機(jī)械設(shè)計(jì)與制造 2018年9期
劉昕運(yùn),馬吉?jiǎng)?/p>
(軍械工程學(xué)院 火炮工程系,河北 石家莊 050003)
1 引言
某型輪式自行火炮是我國(guó)自主研制的第一種輪式自行火炮,采用(6×6)驅(qū)動(dòng)模式底盤(pán)以及100mm高膛壓滑膛炮[1]。突擊炮是一種用于為步兵提供短距離炮火火力支援的裝甲戰(zhàn)斗車(chē)輛。它是一種進(jìn)攻性武器,要求高機(jī)動(dòng)、大火力地提供迅速和強(qiáng)力的支援。該型武器裝備的作戰(zhàn)模式?jīng)Q定了射擊和行駛產(chǎn)生的振動(dòng)響應(yīng)全部經(jīng)過(guò)六個(gè)獨(dú)立懸架傳遞,在實(shí)裝使用過(guò)程中,某些長(zhǎng)時(shí)間工作的自行火炮懸架橫臂上產(chǎn)生疲勞破壞裂紋甚至斷裂失效的現(xiàn)象。因此,分析懸架系統(tǒng)破壞機(jī)理以及內(nèi)部應(yīng)力應(yīng)變規(guī)律十分必要。目前,針對(duì)懸架系統(tǒng)的研究很多,如考慮汽車(chē)懸架柔性的整車(chē)平順性研究[2],或者基于懸架剛?cè)狁詈系钠?chē)優(yōu)化分析等[3]。但是對(duì)于輪式自行火炮的懸架剛?cè)狁詈戏治鰳O少,大部分文獻(xiàn)均采用剛性圓柱連桿相互連接構(gòu)成。傳統(tǒng)輪式自行火炮的疲勞強(qiáng)度評(píng)估均是利用實(shí)車(chē)在各種道路路試和射擊實(shí)驗(yàn),雖然測(cè)試較為準(zhǔn)確,但是測(cè)試時(shí)間十分冗長(zhǎng)且耗費(fèi)大量人力和經(jīng)費(fèi)。在后期使用時(shí)出現(xiàn)問(wèn)題往往很難發(fā)現(xiàn)問(wèn)題根源,難以修改。隨著計(jì)算機(jī)軟件的飛速發(fā)展,CAE分析技術(shù)在此領(lǐng)域取得了相當(dāng)大的應(yīng)用成果,節(jié)約大量人力財(cái)力并能及時(shí)在出現(xiàn)問(wèn)題前后修正實(shí)體機(jī)構(gòu)。故運(yùn)用Solidworks、Adams、Abaqus等軟件建立包含柔性身管和上下橫臂的全炮剛?cè)狁詈蟿?dòng)力學(xué)模型,對(duì)其行駛和射擊過(guò)程進(jìn)行仿真,分析橫臂應(yīng)力應(yīng)變規(guī)律,以期在后期解決火炮的靜力強(qiáng)度和疲勞強(qiáng)度問(wèn)題。
2 全炮剛?cè)狁詈夏P徒?/h2>2.1 火力部分模型
為了射擊時(shí)身管能更加準(zhǔn)確的模擬后座和復(fù)進(jìn)運(yùn)動(dòng),使用模態(tài)綜合法將身管模型簡(jiǎn)化為柔體。在Abaqus中建立身管有限元模型,劃分45846個(gè)八結(jié)點(diǎn)六面體單元并分析模態(tài),取其前50階模態(tài)集作為主模態(tài)導(dǎo)入Adams中。通過(guò)運(yùn)動(dòng)副連接耦合節(jié)點(diǎn)和炮尾、炮口制退器、搖架,利用Adams函數(shù)編輯器、數(shù)據(jù)樣條曲線、用戶(hù)子程序等編寫(xiě)炮膛合力、復(fù)進(jìn)機(jī)力、摩擦力、駐退機(jī)力。其中炮膛合力直接由內(nèi)彈道計(jì)算得到的膛壓曲線加載,復(fù)進(jìn)機(jī)力和駐退機(jī)力分別由式(1)和式(2)加載。

式中:S0—復(fù)進(jìn)機(jī)折合高度;Pf0—復(fù)進(jìn)機(jī)初力;X—后座位移。

式中:A0—活塞工作面積;Ap—節(jié)制環(huán)孔面積;Afj—駐退桿內(nèi)腔直徑面積(復(fù)進(jìn)節(jié)制器工作面積);Ω—支流最小截面積;ax—流液孔面積;K1、K2—主流和支流液壓阻力系數(shù);r—液體重度;V—后坐速度。
2.2 行走部分模型
行走部分可簡(jiǎn)化為由車(chē)體、獨(dú)立懸架、輪胎組成,其中懸架是指車(chē)身與車(chē)輪之間的一切傳力連接裝置的總稱(chēng)[4-5]。自行火炮的懸架系統(tǒng)由結(jié)構(gòu)完全相同的六個(gè)不等長(zhǎng)雙橫臂獨(dú)立懸架構(gòu)成,其結(jié)構(gòu)主要分成A字形下橫臂、單上橫臂、轉(zhuǎn)向節(jié)、液壓減震器、螺旋彈簧。上下橫臂與轉(zhuǎn)向節(jié)直接用球副連接,與車(chē)體用轉(zhuǎn)動(dòng)副連接,由于不考慮轉(zhuǎn)向特性,簡(jiǎn)化轉(zhuǎn)向橫拉桿為點(diǎn)面運(yùn)動(dòng)約束。減振螺旋彈簧和非線性液壓阻尼器特性由剛度和阻尼曲線決定[1]。
同身管一樣建立懸架上下橫臂有限元模型,采用十節(jié)點(diǎn)二次四面體單元?jiǎng)澐志W(wǎng)格,其中上橫臂劃分21955個(gè)單元,下橫臂劃分68632個(gè)單元,橫臂網(wǎng)格劃分,如圖1所示。

圖1 懸架上下橫臂網(wǎng)格劃分Fig.1 Suspension Upper and Lower Arm Meshing
對(duì)模型進(jìn)行模態(tài)分析,同樣取前50階模態(tài)集,生成帶應(yīng)力應(yīng)變信息的模態(tài)中性(MNF)文件導(dǎo)入Adams中。
搖架底面和炮尾部分建立接觸,并修改接觸參數(shù)以模擬相互撞擊時(shí)的緩沖結(jié)構(gòu)。對(duì)高低機(jī)建模,使用作用在耳軸處的扭簧代替,高低機(jī)剛度和阻尼用Y Cai理論[6-8]等效求解接觸剛度并和碟形彈簧剛度串聯(lián)而成。
2.3 地面模型
隨機(jī)不平路面激勵(lì)是影響關(guān)鍵位置振動(dòng)信號(hào)的主要因素之一,路面隨機(jī)信號(hào)只能用各種統(tǒng)計(jì)特征量來(lái)表征它,可用功率譜密度來(lái)表征它的統(tǒng)計(jì)功率譜特征,擬合為[8]:

式中:n2、n1—有效頻帶的上下限;n—空間頻率,表示每單位長(zhǎng)度變化次數(shù);Gq(no)—參考空間頻率n0下的功率譜值,數(shù)值取決于路面的等級(jí)。
使用Fourier逆變換法對(duì)路面不平度進(jìn)行重構(gòu)。該方法是由已知路面功率譜得到對(duì)應(yīng)的一系列離散Fourier變化的模值,再用正態(tài)分布隨機(jī)序列經(jīng)Fourier變化后取相位信息作為相角輸入,構(gòu)造出新的頻域信號(hào),再進(jìn)行Fourier逆變換就得到所求路面不平度的隨機(jī)序列。該方法理論嚴(yán)密,所求路面信號(hào)與標(biāo)準(zhǔn)路面譜擬合程度最好[9]。
最終組合3個(gè)子模型,建立起的全炮剛?cè)狁詈蟿?dòng)力學(xué)模型,如圖2所示。該模型共由15個(gè)剛體和13個(gè)柔體組成。
3 仿真計(jì)算與分析
3.1 隨機(jī)不平路面行駛分析
為比較得出剛?cè)狁詈夏P偷膬?yōu)點(diǎn)和區(qū)別,分別對(duì)剛性橫臂懸架和柔性橫臂懸架自行火炮在D級(jí)隨機(jī)路面上進(jìn)行行駛仿真分析,2s加速時(shí)間,15km/h行駛速度,測(cè)量懸架主銷(xiāo)內(nèi)傾角與輪胎外傾角。主銷(xiāo)內(nèi)傾角是指鉛垂線和主銷(xiāo)軸線之間的夾角在車(chē)輛橫向平面上的投影,車(chē)輪跳動(dòng)時(shí)主銷(xiāo)內(nèi)傾角可提高車(chē)輛轉(zhuǎn)向輕便性,自行火炮主銷(xiāo)內(nèi)傾角隨車(chē)輪上下跳動(dòng)行程的變化曲線[10],如圖3所示。車(chē)輪外傾角是指車(chē)輪胎面與鉛垂線的夾角,其變化曲線,如圖4所示。由計(jì)算結(jié)果可以看到,剛性懸架系統(tǒng)與柔性懸架系統(tǒng)存在較大差別,這也證明了建立輪式自行火炮剛?cè)狁詈蠎壹芟到y(tǒng)的必要性,柔性上下橫臂能夠增加模型的準(zhǔn)確性。

圖4 車(chē)輪外傾角變化Fig.4 Wheel Camber Angle Changes
3.2 靜止間射擊分析
在進(jìn)行射擊分析前,需要對(duì)射擊模型進(jìn)行驗(yàn)證,模型驗(yàn)證是確定模型準(zhǔn)確性的唯一方法。將模型置于平直路面上,各輪制動(dòng),身管處于0高低角和0方向角,模擬自行火炮靜止水平射擊過(guò)程。將提取的各項(xiàng)仿真數(shù)據(jù)與相對(duì)應(yīng)的實(shí)驗(yàn)數(shù)據(jù)進(jìn)行比較,結(jié)果如表1所示。
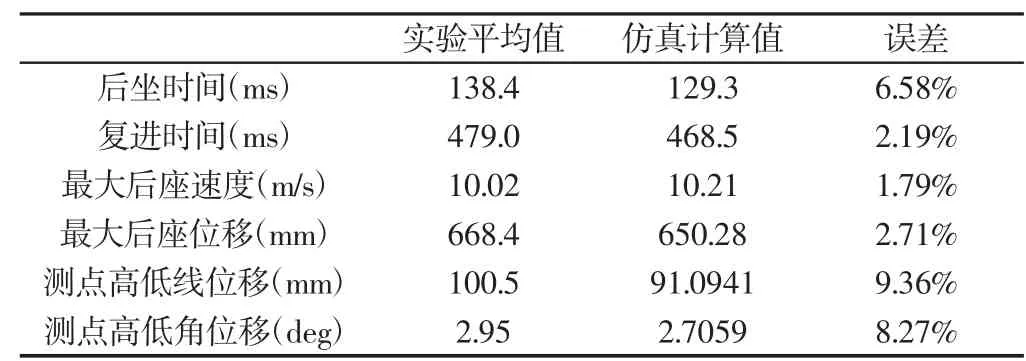
表1 模型驗(yàn)證Tab.1 Model Validation
對(duì)比實(shí)驗(yàn)和仿真數(shù)據(jù),誤差均在工程允許范圍內(nèi),表明虛擬樣機(jī)有一定的準(zhǔn)確性和合理性,模型驗(yàn)證使接下來(lái)的射擊仿真計(jì)算結(jié)果具有可信性。
為比較不同射角工況下懸架的應(yīng)力狀態(tài),取4不同方向角和3不同高低角共12個(gè)射擊角度,分別進(jìn)行仿真分析并提取懸架最大應(yīng)力和應(yīng)變點(diǎn),由于所有懸架中后輪的工作載荷最大,故選取后輪懸架下橫臂為研究對(duì)象,如表2所示。

表2 不同射角下橫臂的應(yīng)力應(yīng)變Tab.2 Arm Stress and Strain of Different Angles
計(jì)算結(jié)果表明,在選取的12射角中,60°方向角20°高低角狀態(tài)下的最大應(yīng)力應(yīng)變值最大,達(dá)到567.272MPa和0.00196MPa。而90°方向角0°高低角狀態(tài)下的最大應(yīng)力應(yīng)變值最小,只有451.026MPa和0.00148MPa。故在實(shí)際射擊中應(yīng)盡量減少60/20或者30/20射擊角度的工況,這些射擊角度更易加速懸架下橫臂的疲勞破壞。
自行火炮加載炮膛合力后0.3945s時(shí)刻的后輪懸架等效應(yīng)力云圖,如圖5所示。此時(shí)刻在下橫臂上達(dá)到了最大應(yīng)力值,如箭頭所指的地方是應(yīng)力最大的區(qū)域,此區(qū)域位于下橫臂下表面靠近螺旋彈簧連接的位置,應(yīng)是懸架系統(tǒng)最易發(fā)生破壞失效的地方,這和近年來(lái)實(shí)體火炮懸架系統(tǒng)產(chǎn)生裂紋區(qū)域是吻合的,這也證明了剛?cè)狁詈夏P偷臏?zhǔn)確性。如需改進(jìn)懸架下橫臂的結(jié)構(gòu)強(qiáng)度,可以采取在此區(qū)域位置加厚、倒圓角、更換材料等措施。

圖5 懸架橫臂Mises等效應(yīng)力云圖Fig.5 Suspension Arm Mises Equivalent Stress Cloud
3.3 行進(jìn)間射擊分析
由于該型輪式自行火炮的作戰(zhàn)模式大多是行駛過(guò)程中射擊,故還需對(duì)其進(jìn)行行進(jìn)間射擊仿真分析。將模型置于平直路面上,選取3種典型射擊角度(30/10、60/20、90/0),持續(xù) 2s的加速時(shí)間,5s時(shí)刻射擊,提取編號(hào)1592的最大應(yīng)力結(jié)點(diǎn)處的Mises等效應(yīng)力隨時(shí)間變化的曲線,如圖6所示。
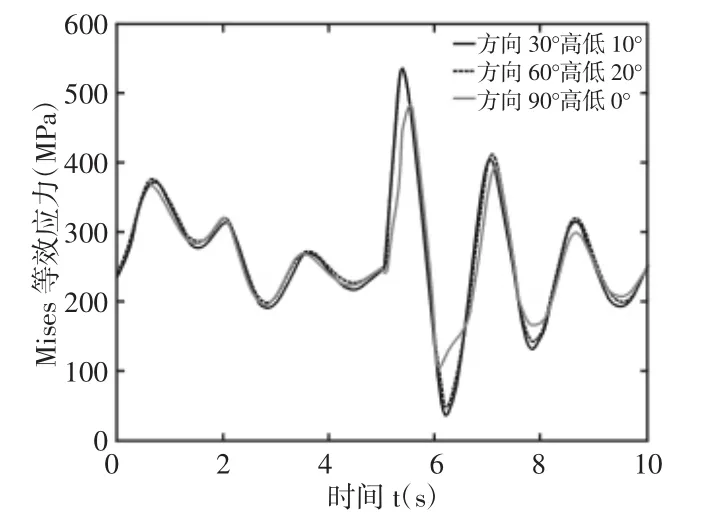
圖6 最大應(yīng)力點(diǎn)處應(yīng)力曲線Fig.6 Stress Curve at the Point of Maximum Stress
30/10射擊角度的懸架最大應(yīng)力值為535.519MPa;60/20射擊角度的懸架最大應(yīng)力值為539.017MPa;90/0射擊角度的最大應(yīng)力值為485.938MPa。通過(guò)進(jìn)一步分析12個(gè)射擊角度發(fā)現(xiàn),相比于靜止間射擊,方向角為0°30°60°時(shí),行進(jìn)間射擊懸架下橫臂最大應(yīng)力值變小,而方向角為90°時(shí),行進(jìn)間射擊懸架下橫臂最大應(yīng)力值反而增大。
4 結(jié)論
(1)對(duì)于輪式自行火炮,經(jīng)過(guò)在隨機(jī)路面行駛分析,說(shuō)明有必要建立包含柔性橫臂的剛?cè)狁詈蠎壹芟到y(tǒng),它能更精確的反映懸架的真實(shí)情況,為以后在輪式自行火炮的動(dòng)力學(xué)模型建立提供了參考方法以及理論依據(jù)。
(2)對(duì)自行火炮模型在靜止?fàn)顟B(tài)進(jìn)行射擊仿真,結(jié)果表明在60°方向角與20°高低角狀態(tài)下的最大應(yīng)力應(yīng)變值最大,且確定了最大應(yīng)力值區(qū)域位于下橫臂底面靠近螺旋彈簧位置。
(3)對(duì)于行進(jìn)間射擊,低方向角度射擊,行駛會(huì)降低后懸架最大應(yīng)力值;而高方向角度(如垂直行駛方向)射擊,行駛會(huì)增大最大應(yīng)力值。獲得的計(jì)算結(jié)果直接為傳統(tǒng)靜力破壞和金屬疲勞破壞研究提供參考依據(jù)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
