北斗系統對流層延遲改正模型精度分析
2018-09-18 11:07:22,,,
雷達科學與技術 2018年4期
, , ,
(河南師范大學電子與電氣工程學院, 河南新鄉 453007)
0 引言
目前世界上有四大衛星導航系統,即美國的GPS、俄羅斯的GLONASS、歐洲的Galileo和中國的北斗系統,其中,北斗衛星導航定位系統是由我國自主研制的區域性衛星導航系統。第一代北斗導航系統(BDS)于2003年開始運行,第二代北斗導航系統(Compass)于2012年底開放運行。目前,北斗衛星導航定位系統運行穩定、工作狀態良好,已在漁業、氣象、交通運輸管理、應急救援等方面獲得了很好的應用[1]。
為了提高北斗衛星導航系統的定位精度,應盡力減小各種誤差源的影響。根據北斗衛星定位的工作機理,衛星信號需要在大氣中傳播,這樣就會產生大氣折射誤差,從而影響北斗衛星的定位精度[2-3]。產生大氣折射誤差的誤差源是對流層和電離層大氣,它們不僅使得無線電波射線發生彎曲,而且也使得其傳播速度減慢(相當于傳播路徑的增加或者時間上的延遲),這兩種情形都會產生折射誤差。相比來講,在大于3°仰角情況下,電波射線彎曲比傳播速度減慢引起的折射誤差小得多[4]。因此對衛星導航定位系統,可以忽略電波射線彎曲引起的誤差,只考慮因電波傳播速度減慢引起的折射誤差,也就是大氣折射引起的時間延遲。由于對流層與電離層的性質不同,因此常將這兩種大氣引起的折射誤差稱為對流層延遲和電離層延遲。
電離層大氣為色散介質,可通過對雙頻測量衛星信號的傳播延遲進行差分,從而消除大部分電離層延遲誤差,或者采用電離層延遲模型進行改正[5]。對流層為非色散介質,無法利用雙頻測量方法來消除其延遲誤差。另外,目前導航衛星的電離層延遲模型的研究很多,也給出了各種情形下電離層延遲模型的選擇建議,而研究北斗系統中的對流層延遲模型較少。盡管相對來講,北斗衛星中的對流層延遲小于電離層延遲,但是為了提高衛星定位精度,對流層延遲也必須考慮。本文以目前公認的對流層電波射線描跡法為標準,通過與目前常用的3種對流層延遲模型的對比,對各個模型的精度和特點進行分析和總結,可為北斗衛星導航系統提高定位精度時對流層延遲模型的選擇奠定基礎。
1 高精度的電波射線描跡法
計算衛星信號通過大氣層引起的折射誤差,目前精度最高的方法是電波射線描跡法,它也是試驗靶場檢驗無線電測量設備精度中的常用方法[4]。該方法一是在假設大氣球面分層情況下由電波理論推出計算折射誤差公式,其公式本身沒有誤差,精度只受來源于大氣球面分層假設的影響,但這一影響很小。二是該方法采用的折射率剖面由測站的實測探空資料獲得,因此其大氣參數代表性誤差引起的折射誤差也很小。這樣,該方法的精度比其他相關計算大氣折射誤差的方法都高,其缺點是不能實現實時計算折射誤差。利用電波射線描跡法計算對流層延遲d的公式為
(1)
式中:E為衛星高度角;H,HT分別為用戶高程、目標離地高程(m);h為任意高度(m);a為地球平均半徑,a=6 370 000 m;n為大氣折射率;A=(a+H)n(H)cosE;φ為用戶與衛星之間的地心張角。
2 對流層延遲計算模型
對流層延遲誤差的改正方法主要有高精度的射線描跡法、延遲參數估計法、模型修正法和實測法等,其中,模型修正法在實際應用中較為廣泛,且其精度也比較高[3]。針對北斗衛星系統,常采用UNB3,Hopfield和Saastamoinen對流層延遲改正模型[6]。
基于模型修正法的對流層延遲改正模型一般都是將對流層延遲分成天頂延遲和映射函數兩部分,這也是目前研究對流層延遲的最廣泛、最有效的方法。另外,對流層大氣主要由干空氣與濕空氣組成,其中濕空氣在10 km以上已經很稀薄,這樣干空氣與濕空氣引起對流層延遲的變化率就不同,因此采用同樣的模型參數就會引起誤差。為了減小對流層延遲改正模型誤差,常將干、濕空氣引起的對流層延遲分開考慮,即對流層延遲由干空氣的延遲和濕空氣的延遲兩部分組成。這樣,基于模型修正法的對流層延遲d為
d=ddmd+dwmw
(2)
式中:d為對流層的總延遲量;dd,dw分別為干、濕空氣引起的對流層天頂(從地面垂直到對流層頂之間)的延遲量;md,mw分別為干、濕空氣的映射函數。
2.1 UNB3模型
UNB3對流層延遲模型由新布倫瑞克大學開發,在實際應用中它不需要測量本地的氣象參數。UNB3對流層天頂延遲模型[7]為
(3)
(4)
式中:Φi+1,Φi為與Φ相差最近的格網大地維度;t為年積日;ξ為個參數的插值。
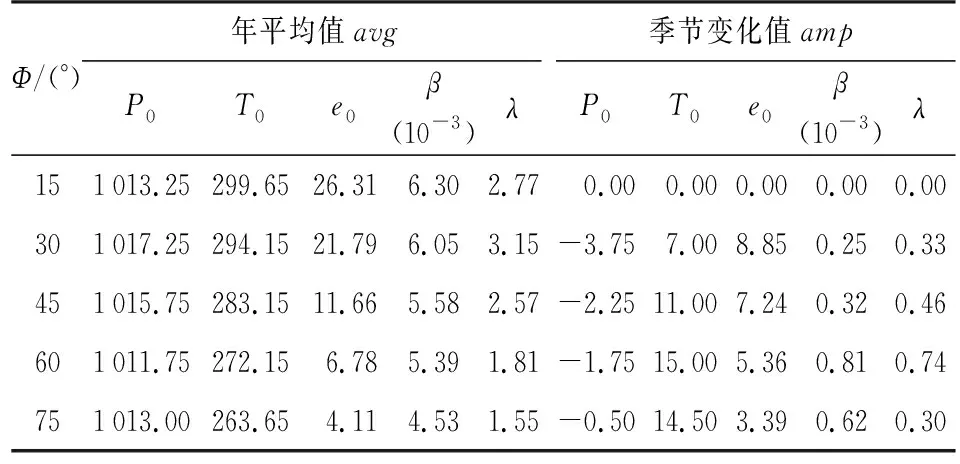
表1 UNB3對流層天頂延遲模型中的氣象參數格網值
UNB3對流層延遲模型中的映射函數采用Niell模型[7]。該模型與各種氣象參數變化無關,取決于衛星高度角、測站高程、測站緯度和年積日(一年中的第幾天)等參數。同對流層天頂延遲模型一樣,映射函數也采用干、濕兩種映射函數模型。Niell干、濕項延遲映射函數模型為
(5)
式中:H為用戶高程(m);E為衛星高度角(rad);ag=2.53×10-5;bg=5.49×10-5;cg=1.14×10-3;ad,bd,cd,aw,bw,cw分別為模型系數,可從表2和表3中插值得到,干項插值公式同式(4),濕項插值公式為
(6)

表2 UNB3對流層天頂延遲干項映射函數模型的系數格網值

表3 UNB3對流層天頂延遲濕項映射函數模型的系數格網值
2.2 Hopfield模型
Hopfield對流層延遲模型由Hopfield提出,它是以全球的氣象探測資料為基礎得到的,在應用中需要測量本地的有關氣象參數。Hopfield對流層天頂延遲模型[8]為
(7)
式中:H為用戶高程(m);T0,P0,e0分別為測站的大氣溫度(K)、氣壓(hPa)、濕度(hPa);Hd,Hw分別為干、濕大氣頂高度(m),它們可由式(6)計算得到。
(8)
Hopfield干、濕項延遲映射函數模型為
(9)
式中,E為衛星高度角(°)。
2.3 Saastamoinen模型
Saastamoinen對流層延遲模型于1973年提出,它是以測站維度、高程、觀測高度角、干溫、水汽為變量的函數,在應用中需要測量本地的有關氣象參數。Saastamoinen對流層天頂延遲模型[9]為
(10)
式中,T0,P0,e0分別為測站的大氣溫度(K)、氣壓(hPa)、濕度(hPa);Φ為測站處的大地維度(rad);H為用戶高程(m);f(Φ,H)為地球自轉所引起重力加速度變化的修正,f(Φ,H)=1-2.66×10-3cos(2Φ)-2.8×10-7H。
Saastamoinen干、濕項延遲映射函數模型與Niell干、濕項延遲映射函數模型相同,如式(5)所示。
3 對流層延遲仿真計算與分析
為了比較3種對流層延遲改正方法的精度,利用鄭州地區2016年1,4,7,10四個代表月(分別代表冬、春、夏、秋四個季度)的實測氣象探測資料進行計算。根據一般情況,假設對流層最大高度為60 km,并假設北斗衛星的高度角分別為1°,3°,5°,7°,10°,15°,20°,25°,30°,35°,40°,45°,50°,55°,60°,65°,70°,75°,80°,85°,90°。將3種對流層延遲改正方法與利用高精度電波射線描跡法計算得到的折射誤差相減,得到的結果如圖1所示。其中R-H,R-S,R-U分別表示射線描跡法與UNB3,Hopfield和Saastamoinen對流層延遲改正模型計算得到的折射誤差之差。
從圖1中的結果可得到一些結論: 1)隨著衛星仰角的增加,UNB3,Hopfield和Saastamoinen三種對流層延遲改正模型的精度逐漸趨于接近,當仰角大于30°以上時,3種改正模型的精度與精確射線描跡法等同。這是因為隨著仰角的增大,電波經過對流層的距離減小,大氣引起的對流層延遲逐漸減小的緣故。2)當衛星仰角較小時,3種改正模型的精度中,Hopfield模型精度最差,Saastamoinen模型的精度最高,UNB3模型的精度居中。Saastamoinen與UNB3模型相比,盡管兩個模型都采用相同的映射函數,但是UNB3模型用到的相關參數是由全球參數統計得到,不需要當地的實時氣象參數,而Saastamoinen模型的相關參數中需要測量本地的有關氣象參數,更接近實際大氣環境,因此其精度高于UNB3模型。Hopfield模型盡管也采用當地的實測氣象參數,但是一是由于它采用的映射函數的階數較少而產生一定的延遲計算誤差,二是由于其中的干、濕大氣頂高度公式是由國外相關氣象參數得到,與我國統計出來的公式也有一定的誤差,這兩種原因可能是該模型精度較差的緣故。3) 3種模型的精度在7月份比其他3個月份的精度都差,這是因為7月份是夏天,濕度變化較大,而所有的對流層延遲改正模型中誤差最大的就是濕度項引起的延遲。從這些結論中可以看出,在實際應用中,當衛星的仰角大于30°時,UNB3,Hopfield和Saastamoinen三種對流層延遲改正模型的任意一種都可較好地實現高精度的對流層延遲改正;當衛星仰角較小時,建議采用Saastamoinen對流層延遲改正模型。
4 結束語
隨著北斗衛星導航系統應用領域的不斷擴大,用戶對其定位精度的要求也不斷提高,這就對減小大氣對衛星定位誤差的對流層延遲改正模型的精度提出了更高的要求。這里通過計算和分析北斗衛星在各種仰角情形下UNB3,Hopfield和Saastamoinen三種常用對流層延遲改正模型的精度,有利于用戶實際應用北斗衛星對對流層延遲改正模型進行選擇。下一步準備利用我國近十年的全國氣象數據,以及相關的天基測量數據,參考這3種模型建立的方法,建立精度更高、適合我國實際應用的對流層延遲改正新模型。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
軍事文摘(2023年10期)2023-06-09 09:15:06
空間科學學報(2021年4期)2021-08-30 08:31:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
核科學與工程(2015年4期)2015-09-26 11:59:03
世界知識畫報·藝術視界(2010年9期)2010-12-31 00:00:00
