漁船中動(dòng)力及轉(zhuǎn)向控制系統(tǒng)研究
2018-09-19 08:39:02吳小洲劉玉良蘇玉香張存喜
關(guān)鍵詞:變頻器
吳小洲,劉玉良,蘇玉香,張存喜
(浙江海洋大學(xué)船舶與機(jī)電工程學(xué)院,浙江舟山 316022)
目前,我國(guó)北部灣地區(qū)500 t以下的小型漁船有8 000多艘,80%以上都安裝了液壓舵機(jī),在該類(lèi)漁船中,往往都是以經(jīng)濟(jì)性為出發(fā)點(diǎn),所以安裝的舵機(jī)大多數(shù)是經(jīng)濟(jì)型的手動(dòng)舵機(jī),可以實(shí)現(xiàn)自動(dòng)操舵功能的小型漁船數(shù)量不多[1],但自動(dòng)舵是船舶控制系統(tǒng)中不可缺少的重要設(shè)備,通過(guò)它可以進(jìn)行航向設(shè)定并使船舶行駛更接近航線,從而更節(jié)能、更經(jīng)濟(jì)。我國(guó)在從20世紀(jì)70年代就開(kāi)始自動(dòng)舵的研究,并取得了一定的成效,但國(guó)內(nèi)自動(dòng)舵的研究側(cè)重于理論方面,進(jìn)行算法仿真,很少做出實(shí)際產(chǎn)品。迄今為止,國(guó)內(nèi)船舶安裝的自動(dòng)舵基本依賴(lài)進(jìn)口[2]。同時(shí),我國(guó)對(duì)向船舶控制的研究往往趨向于船舵控制的單獨(dú)研究,而往往忽略了漁船作為一個(gè)整體在航行中漿舵的配合重要性。
因此本文設(shè)計(jì)了一套由PLC、電子羅盤(pán)、舵角傳感器、GPS定位系統(tǒng)、電磁閥驅(qū)動(dòng)組成的自動(dòng)操舵系統(tǒng)和PLC、變頻器、三相異步電動(dòng)機(jī)等組成的自動(dòng)定速巡航系統(tǒng)配合使用的操作系統(tǒng)來(lái)進(jìn)行漁船的操控,從而實(shí)現(xiàn)漁船沿預(yù)定航線自動(dòng)定速航行的功能。本次設(shè)計(jì)中最重要的是采用了PLC作為控制單元,相比于其他設(shè)計(jì)中采用的單片機(jī)控制,本文中PLC的使用提高了數(shù)據(jù)運(yùn)算處理的可靠性以及輸出控制的穩(wěn)定性,同時(shí)本文中變頻器的運(yùn)用也使得漁船航行速度得到了更加穩(wěn)定的控制。另外本文中可視化單元-觸摸屏的加入使得大量的物理按鈕得到了虛擬化、可視化處理,大大釋放了漁船控制室操作臺(tái)的空間,使得漁船上的人機(jī)交互體驗(yàn)感更加友好,這將使得漁民對(duì)漁船駕駛的操作更加方便,小型漁船在海洋中航行的安全性、經(jīng)濟(jì)性和可操控性[1]更高。
1 漁船動(dòng)力及轉(zhuǎn)向系統(tǒng)控制設(shè)計(jì)
本文設(shè)計(jì)的關(guān)鍵是要實(shí)現(xiàn)沿航線自動(dòng)定速航行的功能,該系統(tǒng)的自動(dòng)航線控制模塊和自動(dòng)定速巡航模塊分別由GPS定位系統(tǒng)、電子羅盤(pán)、舵角傳感器、舵角指示器、舵角表、液壓電磁閥和編碼器、水流傳感器、GPS測(cè)速傳感器、變頻器、三相異步電動(dòng)機(jī)、380V三相電源組成。自動(dòng)航線控制模塊操舵實(shí)現(xiàn)自動(dòng)轉(zhuǎn)向功能,自動(dòng)定速巡航模塊控制變頻器和三相異步電動(dòng)機(jī)實(shí)現(xiàn)自動(dòng)定速巡航功能。系統(tǒng)總圖如圖1所示。
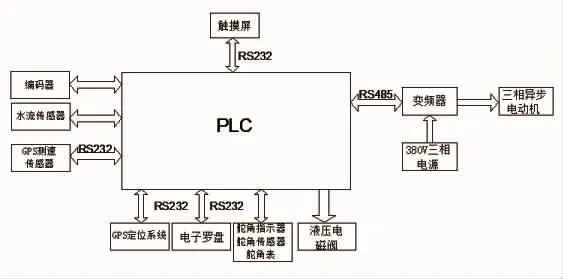
圖1 系統(tǒng)總圖Fig.1 System diagram
1.1 總體控制方案
本次設(shè)計(jì)采用三菱PLC FX2N型號(hào)作為控制元件,配備觸摸屏為系統(tǒng)顯示元件,采用變頻器、三相異步電動(dòng)機(jī)為系統(tǒng)執(zhí)行元件,其控制流程圖如圖2所示。系統(tǒng)采用觸摸屏設(shè)置預(yù)定航線以及航速,并實(shí)時(shí)動(dòng)態(tài)顯示當(dāng)前所處航線位置、航角、舵角以及當(dāng)前所維持航速,另外當(dāng)出現(xiàn)漁船偏離航線、漁船航速波動(dòng)嚴(yán)重、漁船航速失控、三相異步電機(jī)電流電壓過(guò)載等情況時(shí)可實(shí)現(xiàn)自動(dòng)報(bào)警,以便漁民進(jìn)行檢查修正。
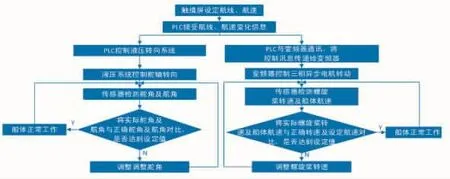
圖2 主程序流程圖Fig.2 The flow chart of main program
1.2 航線控制
本文中開(kāi)發(fā)的是基于PLC控制的的多任務(wù)操舵系統(tǒng),與傳統(tǒng)C51單片機(jī)控制的操舵系統(tǒng)相比,無(wú)論是在數(shù)據(jù)處理還是控制精度上,都具有很大的優(yōu)勢(shì)。
本系統(tǒng)主要由航角傳感器系統(tǒng)、電子羅盤(pán)、GPS定位系統(tǒng)、液壓電磁閥、觸摸顯示模塊等5個(gè)單元組成,控制系統(tǒng)總體結(jié)構(gòu)如圖3所示,整個(gè)系統(tǒng)主要實(shí)現(xiàn)數(shù)據(jù)采集、顯示,控制等功能。其中由PLC實(shí)現(xiàn)控制計(jì)算,液壓電磁閥實(shí)現(xiàn)舵角動(dòng)作,配備傳感器GPS定位系統(tǒng)、電子羅盤(pán)、舵角反饋模塊實(shí)現(xiàn)反饋,最終由觸摸屏顯示控制狀態(tài)并提供人機(jī)交互界面。
此舵角控制模塊中采用電子羅盤(pán)獲取漁船當(dāng)前航角α°,并與GPS定位系統(tǒng)所得當(dāng)前航線正確航角γ°進(jìn)行對(duì)比,得出偏航角漬°;再與舵角傳感器得到的舵角茁°作比較,經(jīng)PLC控制器PID算法后產(chǎn)生偏舵角啄°,由啄°的正負(fù)以及大小來(lái)驅(qū)動(dòng)電磁閥操控舵的左右轉(zhuǎn)向及控制舵的轉(zhuǎn)向角度,如圖4所示[3-4]。
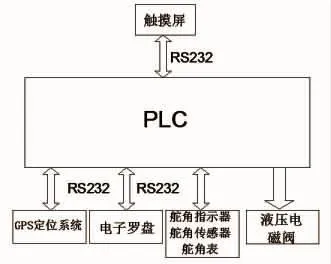
圖3 自動(dòng)操舵簡(jiǎn)圖Fig.3 Automatic steering diagram
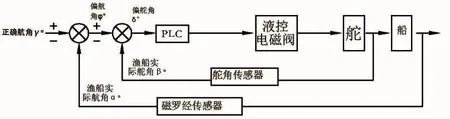
圖4 自動(dòng)操舵控制原理框圖Fig.4 Automatic steering control block diagram
1.3 自動(dòng)定速巡航
在我國(guó)大部分小型漁船的航行采用的是手動(dòng)調(diào)節(jié)航速進(jìn)行航行,它需要漁民根據(jù)當(dāng)時(shí)海況進(jìn)行不斷地手動(dòng)調(diào)節(jié),這就大大增加了漁民的勞動(dòng)強(qiáng)度。為減輕漁民的負(fù)擔(dān),本文在自動(dòng)操舵的基礎(chǔ)上增加設(shè)計(jì)了漁船自動(dòng)定速巡航的功能,它能根據(jù)當(dāng)前海域的水流情況對(duì)電機(jī)轉(zhuǎn)速進(jìn)行自動(dòng)調(diào)節(jié),從而實(shí)現(xiàn)定速巡航功能。
另為響應(yīng)國(guó)家低碳環(huán)保的號(hào)召,此次設(shè)計(jì)所采用的的動(dòng)力系統(tǒng)為電力系統(tǒng),動(dòng)力裝置為三相異步電動(dòng)機(jī),由PLC及變頻器控制驅(qū)動(dòng)。
1.3.1 定速巡航硬件系統(tǒng)設(shè)計(jì)
本系統(tǒng)主要由觸摸屏、編碼器、變頻器、三相異步電動(dòng)機(jī)、380 V三相電源等7個(gè)單元組成,控制系統(tǒng)總體結(jié)構(gòu)如圖5所示,其中觸摸屏仍作為人機(jī)交互界面使用,編碼器、水流傳感器、GPS測(cè)速傳感器作為反饋系統(tǒng)使用,380 V電源提供動(dòng)力來(lái)源,變頻器作為三相異步電動(dòng)機(jī)控制裝置,由PLC計(jì)算數(shù)據(jù)并實(shí)現(xiàn)各模塊之間的通訊。
1.3.2 自動(dòng)定速巡航原理
漁船在海域當(dāng)中航行時(shí)海況復(fù)雜,水流流速不斷變化,如果采用電機(jī)勻速運(yùn)轉(zhuǎn),漁船的航行速度將不斷發(fā)生變化。因此為了實(shí)現(xiàn)定速巡航,就需要根據(jù)當(dāng)前海域的水流流速來(lái)調(diào)節(jié)電機(jī)轉(zhuǎn)速?gòu)亩鴮?shí)現(xiàn)漁船航行速度不變。
該模塊可完成實(shí)際船速、水流流速、電機(jī)實(shí)際轉(zhuǎn)速的采集、顯示、信號(hào)轉(zhuǎn)換和傳輸?shù)裙δ堋H鐖D6所示,本設(shè)計(jì)選用了GPS測(cè)速傳感器、水流流速傳感器和編碼器等傳感器。GPS測(cè)速傳感器首先采集到漁船實(shí)際船速,并把船速輸送到PLC,經(jīng)過(guò)與給定船速的比較后得到偏航速。之后根據(jù)當(dāng)前海域的水流流速計(jì)算出所需電機(jī)轉(zhuǎn)速,經(jīng)與編碼器所測(cè)當(dāng)前電機(jī)實(shí)際轉(zhuǎn)速對(duì)比得到偏轉(zhuǎn)速。最后由PLC將所需提升電機(jī)轉(zhuǎn)速信息發(fā)送給變頻器,由變頻器控制三相異步電機(jī)改變轉(zhuǎn)速,從而實(shí)現(xiàn)船舶的定速巡航,其系統(tǒng)程序流程圖如圖7所示。
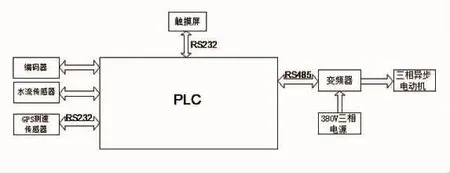
圖5 自動(dòng)定速巡航簡(jiǎn)圖Fig.5 Automatic constant speed cruise diagram
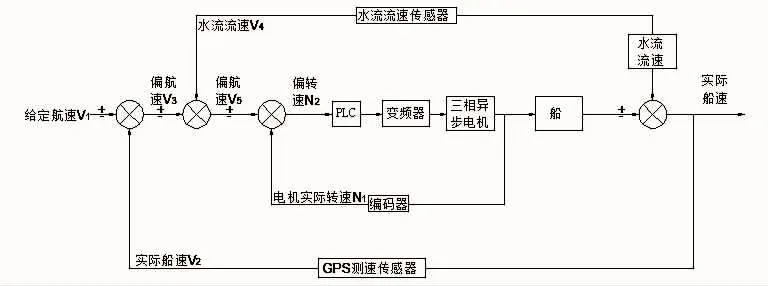
圖6 自動(dòng)定速巡航功能原理圖Fig.6 The schematic of automatic constant speed cruise function

圖7 自動(dòng)定速巡航流程圖Fig.7 The flow chart of automatic constant speed cruise

圖8 航速航線設(shè)定圖Fig.8 Navigational speed and air route setting map
2 觸摸屏系統(tǒng)設(shè)計(jì)
本次設(shè)計(jì)的系統(tǒng)包括漁船航線、航速的的設(shè)定,漁船航線、航速、舵角的顯示以及漁船故障報(bào)警的提示三部分。為了方便參數(shù)設(shè)置以及動(dòng)態(tài)顯示漁船航行狀態(tài),本次設(shè)計(jì)中采用了臺(tái)達(dá)的B10E615型號(hào)觸摸屏作為控制及人機(jī)交換單元,該觸摸屏具有儀器儀表顯示、圖表繪制、按鈕設(shè)置等功能,極大地方便了系統(tǒng)操作設(shè)置,同時(shí)由于物理按鍵、儀表儀盤(pán)的虛擬化,操作臺(tái)的空間得到了極大釋放。
2.1 漁船航線、航速設(shè)定
本次漁船控制系統(tǒng)中可進(jìn)行漁船航線、航速的設(shè)定,從而實(shí)現(xiàn)在當(dāng)前海域的自動(dòng)航行以及定速巡航功能,另外漁船航速航線的設(shè)定由虛擬儀表盤(pán)顯示,增加了人機(jī)交互體驗(yàn),如圖8所示。
2.2 漁船航線、航速的顯示
點(diǎn)擊下一頁(yè)菜單按鈕進(jìn)入航速監(jiān)視頁(yè)面,如圖9所示,此頁(yè)面設(shè)置了實(shí)時(shí)舵角、航速顯示儀表盤(pán),它可顯示當(dāng)前漁船所保持的舵角、航速。本頁(yè)也設(shè)置了航線變化圖表繪制功能,它能將漁船歷史位置繪制成航線變化圖,從而給駕駛者提供直觀的航線波動(dòng)變化對(duì)比,以方便駕駛者對(duì)漁船的航行進(jìn)行修正。
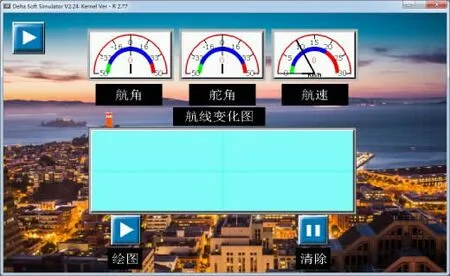
圖9 參數(shù)顯示界面Fig.9 Parameter display interface
2.3 漁船故障的報(bào)警提示
另外系統(tǒng)中還加入了漁船歷史故障報(bào)警記錄模塊、當(dāng)前故障報(bào)警記錄模塊和歷史故障報(bào)警次數(shù)記錄模塊等三個(gè)漁船航行報(bào)警功能模塊。當(dāng)漁船偏離航線或產(chǎn)生了故障之后相應(yīng)的傳感器會(huì)將信息傳到PLC,并顯示在觸摸屏上,并記錄在案,如圖10和圖11所示。同時(shí)故障發(fā)生的次數(shù)也將被觸摸屏所記錄,供駕駛者在回港之時(shí)及時(shí)對(duì)故障率高的模塊進(jìn)行修復(fù)。

圖10 報(bào)警記錄畫(huà)面Fig.10 Alarm record screen
圖11 報(bào)警子頁(yè)面Fig.11 Alarm subpage
3 漁船航行穩(wěn)定性測(cè)試
3.1 PLC控制程序及通訊協(xié)議設(shè)置
本次試驗(yàn)控制中采用 FX2 N-485D通訊板為PLC與變頻器的通訊模塊,采用標(biāo)準(zhǔn)的Modbus通訊協(xié)議保證PLC與變頻器正常通訊,其接線圖如圖12所示,PLC通訊協(xié)議及正轉(zhuǎn)控制程序如圖13所示[5]。
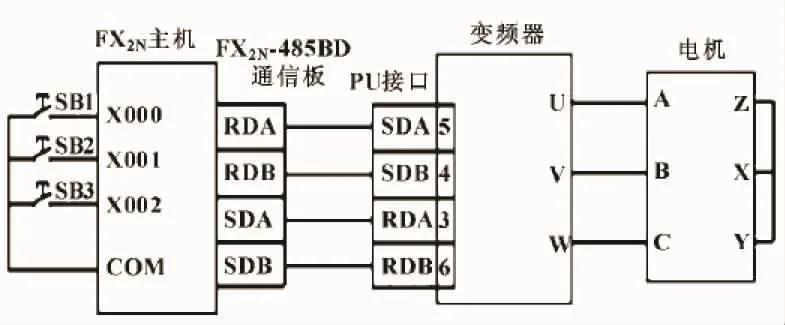
圖12 PLC、變頻器系統(tǒng)接線圖Fig.12 The wiring diagram of PLC,frequency converter system
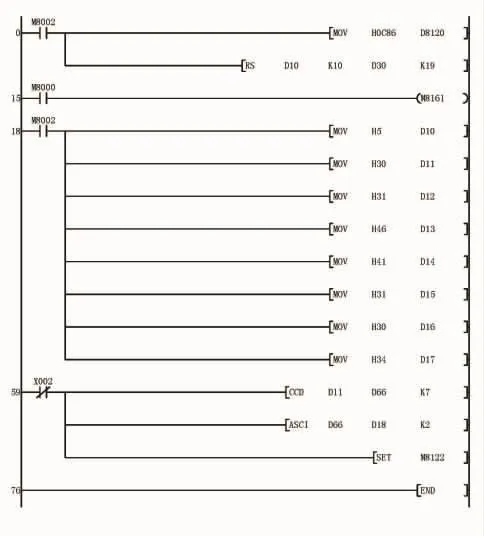
圖13 PLC、變頻器通訊協(xié)議設(shè)置及正傳控制指令Fig.13 Communication protocol settings and forward control commands of PLC and frequency converter
3.2 變頻器PID控制設(shè)置
變頻器PID調(diào)控模式接線如圖14所示。試驗(yàn)所用電動(dòng)機(jī)為6極對(duì)數(shù)三相異步電動(dòng)機(jī),其額定轉(zhuǎn)速為480 r/min,檢測(cè)轉(zhuǎn)換裝置為光碼盤(pán)及信號(hào)轉(zhuǎn)換電路,輸出信號(hào)為0~10 V,其具體對(duì)應(yīng)參數(shù)見(jiàn)表1,變頻器參數(shù)設(shè)置見(jiàn)表2。

表1 對(duì)應(yīng)轉(zhuǎn)數(shù)光碼盤(pán)及信號(hào)轉(zhuǎn)換電路輸出信號(hào)表Tab.1 The output signal table of optical encoder and signal conversion circuit corresponding to number of revolutions
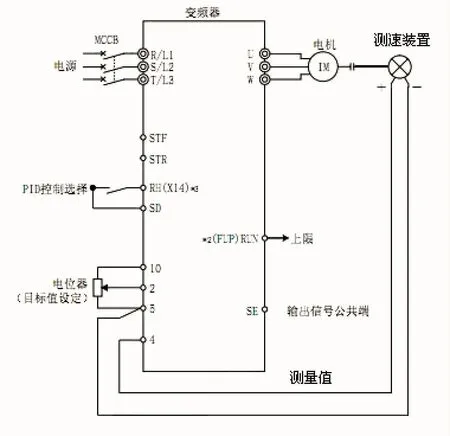
圖14 變頻器、三相異步電動(dòng)機(jī)接線圖Fig.14 The wiring diagram of frequency converter and three-phase asynchronous motor
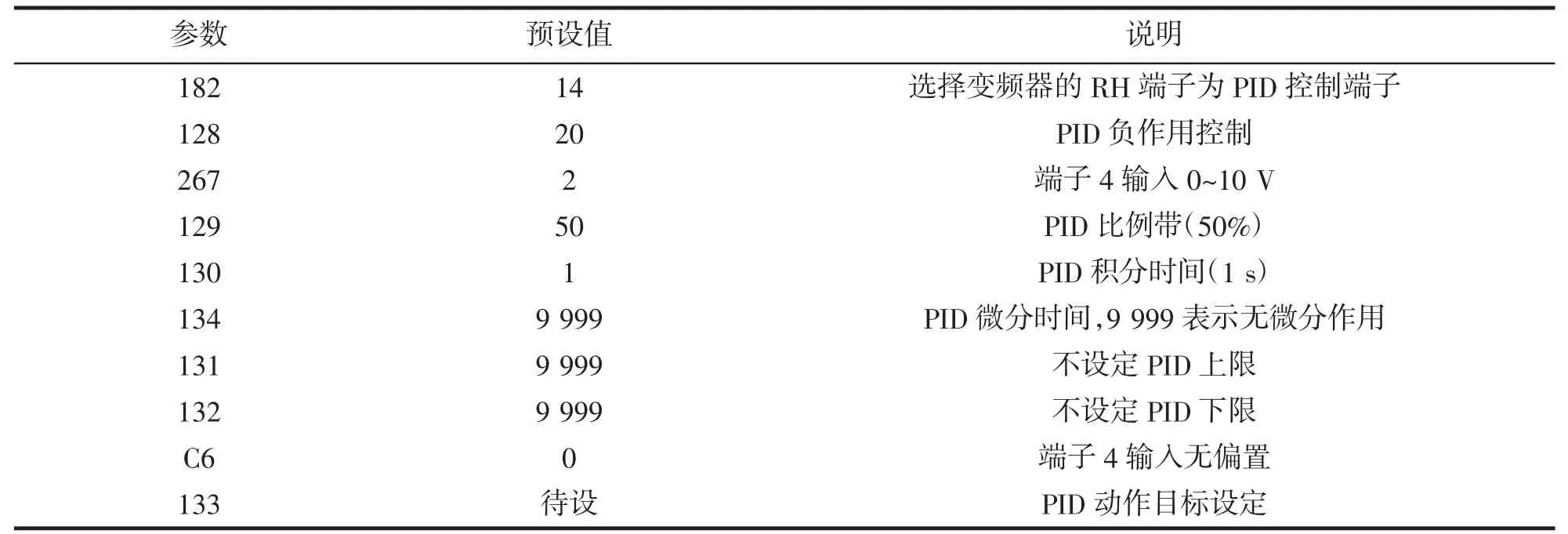
表2 變頻器參數(shù)設(shè)置表Tab.2 The parameter setting table of frequency converter

表3 三相異步電動(dòng)機(jī)轉(zhuǎn)數(shù)測(cè)試數(shù)據(jù)記錄表Tab.3 The data record table of three-phase asynchronous motor revolution test
3.3 三相異步電動(dòng)機(jī)測(cè)速記錄
參數(shù)設(shè)置完畢閉合變頻器RH開(kāi)關(guān),PLC發(fā)送正轉(zhuǎn)指令,變頻器以PID模式控制電機(jī)運(yùn)轉(zhuǎn),記錄電動(dòng)機(jī)的穩(wěn)定轉(zhuǎn)速于表3。
由表3可知實(shí)際轉(zhuǎn)速與期望的轉(zhuǎn)速誤差范圍在±5%之內(nèi),符合控制系統(tǒng)穩(wěn)定性的要求,保證了漁船海上航行的穩(wěn)定性。
4 總結(jié)分析
本文基于漁船自動(dòng)化的需求,完成了動(dòng)力系統(tǒng)及轉(zhuǎn)向系統(tǒng)的設(shè)計(jì),最后進(jìn)行了相關(guān)試驗(yàn),試驗(yàn)結(jié)果表明相較于傳統(tǒng)人工操舵、調(diào)速控制船只航行,本次設(shè)計(jì)中所設(shè)計(jì)的動(dòng)力系統(tǒng)及轉(zhuǎn)向系統(tǒng)的結(jié)合實(shí)現(xiàn)了漁船沿航線穩(wěn)定自動(dòng)定速巡航的功能,解決了漁船沿航線自動(dòng)轉(zhuǎn)向航行以及在復(fù)雜海域中定速巡航的技術(shù)難題。同時(shí)本次設(shè)計(jì)中采用的變頻器PID控制模式下的異步電機(jī)動(dòng)力模塊,使得整體船只結(jié)構(gòu)相對(duì)簡(jiǎn)單,制造、使用和維護(hù)方便,運(yùn)行可靠,成本較低,符合小型漁船的設(shè)計(jì)要求。但是由于三相異步電機(jī)存在轉(zhuǎn)數(shù)差,導(dǎo)致其調(diào)速性能較差,所以在一些要求較寬廣和平滑調(diào)速范圍的船只上不太適用。
另外漁船自動(dòng)化、智能化是漁船技術(shù)革新的嶄新課題,還有大量的工作要做,所以后續(xù)的工作應(yīng)以漁船整體智能控制技術(shù)開(kāi)發(fā)等相關(guān)問(wèn)題為重心展開(kāi)研究。
猜你喜歡
消費(fèi)電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(shù)(2021年3期)2021-08-13 08:39:56
防爆電機(jī)(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測(cè)試(2017年23期)2017-04-04 05:07:32
自動(dòng)化博覽(2014年12期)2014-02-28 22:34:39
自動(dòng)化博覽(2014年10期)2014-02-28 22:33:52