基于毫米波近場成像的二維稀疏面陣結構
2018-09-27 11:36:36趙宇姣成彬彬姜濟群
系統工程與電子技術 2018年9期
趙宇姣, 成彬彬, 劉 杰, 姜濟群, 喻 洋
(1. 中國工程物理研究院電子工程研究所, 四川 綿陽 621900; 2. 中國工程物理研究院微系統與 太赫茲研究中心, 四川 成都 610200; 3. 公安部第一研究所北京 100048)
0 引 言
近年來,隨著半導體技術的發展,毫米波成像系統的性能得到了迅速提升。毫米波具有良好的穿透性,能夠有效實現對目標的高分辨檢測,在人體安檢[1-3]、汽車防撞[4-5]、氣象探測[6-8]等領域的有著廣泛的應用。在近場安檢成像技術中,目標的機動性、非合作性與環境的復雜性對毫米波安檢系統的實時性能提出了較高要求。目前,國內外的近場安檢系統多采用一維電動掃描與一維機械掃描相結合的方式[9]。以美國西北太平洋國家實驗室(pacific northwest national laboratory,PNNL)研發的毫米波安檢系統ProVision為例,系統包括兩個一維線陣,分別沿半個圓柱面對目標進行掃描[10-11],掃描時間1.5 s[12]。該體制安檢系統的缺點主要在于受機械運動的限制,掃描時間相對較長,人體的呼吸作用或輕微移動容易導致成像結果的模糊[13]。基于平面陣結構[14-15]的安檢系統為精確、實時的近場高分辨率成像提供了可能。以德國羅德與施瓦茨(Rohde & Schwarz)公司研發的安檢系統QPS 200為例,系統集成了3 072個發射天線與3 072個接收天線,掃描時間小于25 ms[16];該系統采用貼片式天線結構[17],當天線的間距較小時,耦合信號會影響射頻接收機的正常工作,因此,在后端的信號處理中,需要將耦合較大的接收信號判為無效[18],降低了數據的利用率。本文以QPS系統的口字型面陣結構為出發點,基于等效陣元均勻分布的原則[19-20],研究了適用于毫米波近場成像的二維稀疏面陣結構。改進的陣型結構有效降低了臨近天線的耦合作用,簡化了后端信號處理的流程并提高了數據利用率。
1 陣列結構與信號模型
1.1 基于口字型的稀疏面陣結構
基于等效孔徑的概念,二維稀疏面陣的遠場性能E(x,y)由發射孔徑aT(x,y)與接收孔徑aR(x,y)的二維卷積給出。在近場條件下,陣列性能E(x,y)會有所惡化,但仍可以借鑒等效孔徑的設計思路,通過增加冗余天線的方法,綜合考慮天線耦合、成像性能以及陣列結構可擴展性等因素得到最優的陣列結構。
傳統的基于口字型布局的二維稀疏面陣結構是一種對稱型的布局結構。以QPS系統的陣列結構為例,2N個發射天線與2N個接收天線均勻分布于“口”字的四邊,如圖1所示。
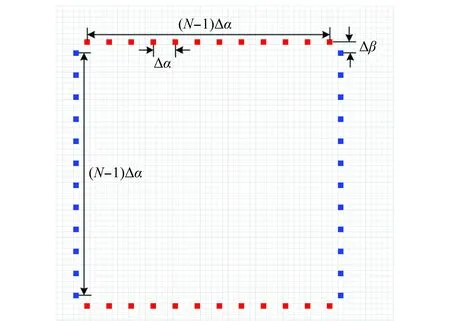
圖1 QPS系統的陣列結構Fig.1 Sparse array structure of QPS system
為避免在方位及高度維出現混疊,根據空間采樣定理,相鄰發射(接收)天線的間距Δα需滿足
(1)
式中,θb為天線的波束寬度;λ為波長。
圖1中Δβ表示發射天線到接收天線的最小垂直距離,為保證等效陣元均勻分布,在QPS系統中,Δβ=Δα/2。圖1所示的陣列結構在實際應用中取得了較好的成像效果[21-22],但其缺點在于發射天線與接收天線的距離太近,導致交叉耦合信號影響射頻接收通道的正常工作[9]。
1.2 改進的稀疏面陣結構
針對傳統口字型面陣結構耦合信號過大的問題,本文研究了一種改進的二維稀疏面陣結構,其等效孔徑與位置關系如圖2所示。圖2(a)為口字型二維稀疏面陣的等效孔徑示意圖,圖2(b)為收發天線的位置關系示意圖。
在改進的稀疏面陣結構中,Δβ=Δα,在保證等效陣元均勻分布的同時,增大了接收天線與發射天線的距離,減小了交叉耦合信號的強度。
記等效孔徑在方位及高度維的長度分別為La和Lh,而目標到面陣所在平面的垂直距離為R,那么系統的方位維分辨率δa和高度維分辨率δh可以分別表示為
(2)

(3)
同時,系統的距離維分辨率δz則表示為
(4)
式中,c為光速;B為系統的工作帶寬。
1.3 目標回波信號模型
在三維直角坐標系下,發射天線到點目標P的距離為rtx,接收天線到P的距離為rrx。因此,接收天線收到的目標回波信號較發射信號的時延為
(5)
當發射信號為線性調頻信號時,若記點目標反射系數為σ(rtx,rrx),系統工作頻率和調頻斜率分別為fc和k,則目標回波信號可以表示為
s(rtx,rrx,t)=σ(rtx,rrx)·ej2πfc[t-τ(rtx,rrx)]ejπk[t-τ(rtx,rrx)]2
(6)
記信道的處理增益為Γ,那么目標回波信號經去斜及混頻處理后得到的基頻回波可以表示為
sb(rtx,rrx,t)=σ(rtx,rrx)·Γ·ejπ[k·τ2(rtx,rrx)-fc·τ(rtx,rrx)]e-j2πkτ(rtx,rrx)t
(7)
式(7)中的基頻回波信號為單頻信號,其頻率由調頻斜率與回波時延的乘積決定。利用傅里葉變換完成對基頻回波信號的距離壓縮,記sb(rtx,rrx,t)的頻域響應為Sb(rtx,rrx,f),那么利用后向投影算法可以重構出點目標P的反射強度,表達式為
,rrx,f)·ej2πfcτ(rtx,rrx)
(8)
式中,Ip為點目標P的反射強度;Ntx和Nrx分別示發射天線和接收天線的數量。利用式(8)對成像區域內所有點進行處理,則可以得到該區域的三維成像。
2 仿真分析
當目標位于成像區域的中心且與二維稀疏面陣的垂直距離為0.3 m時,其點目標擴展函數的仿真結果如圖3所示。
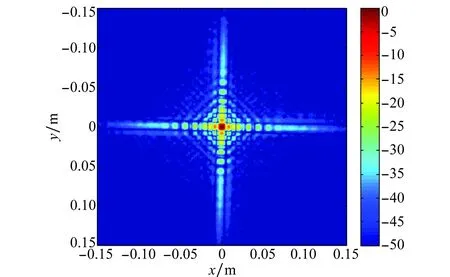
圖3 點目標擴展函數仿真Fig.3 Simulated point spread function
由于等效陣元均勻分布于等效孔徑平面內,因此,點擴展函數在方位及高度維的特性基本一致,呈十字型結構。根據式(2)~式(4)可以看出,在目標距離R與系統參數λ、B一定的前提下,系統的縱向分辨率一定,而橫向分辨率僅與等效孔徑的長度有關。改進的陣型結構與QPS系統的陣型結構的成像區域一致,故二者的等效孔徑長度一致,即兩種陣型結構可以獲得同樣的空間分辨率。通過計算得到改進的陣型的理論橫向分辨率為δa=δh=5.7 mm,縱向分辨率為δz=3 cm。點目標擴展函數在方位及距離維的剖面如圖4(a)和圖4(b)所示,圖4(a)和圖4(b)中主瓣的寬度分別為6 mm和3 cm,與系統的理論分辨率一致。
3 近場成像實驗
本文的原理驗證實驗由單組收發天線通過機械掃描的方式完成。實驗系統包括主控計算機、毫米波收發信道、四軸龍門位移平臺以及收發天線。主控計算機基于美國國家儀器有限公司(national instruments, NI)控制平臺,利用NI FlexRIO模塊實現對信道及位移臺的觸發并完成對回波信號的實時采集及預處理。毫米波收發信道采用超外差結構,利用直接數字式頻率合成器(direct digital synthesizer, DDS)產生640~800 MHz的線性調頻信號,掃頻時間60 μs,基帶信號經倍頻及上變頻鏈路后得到32~37 GHz的發射信號,經發射天線向外輻射,發射功率為1 mW;經接收天線收到的目標回波信號在接收端與參考信號進行混頻后得到中頻的回波信號,中頻回波信號經同相正交(in-phase quadrature, IQ)解調后產生I、Q兩路基帶回波信號并由NI FlexRIO模塊進行實時采集。原理驗證實驗中采用金屬仿真手槍作為成像目標,目標距二維稀疏口字陣0.3 m,成像結果如圖5所示。圖5(a)為目標的光學照片,圖5(b)為目標經后向投影算法重構的最大值投影結果。
對復雜目標的三維成像實驗驗證了二維稀疏口字型面陣的成像能力。由于陣元數量減少,稀疏面陣在方位及高度維會引入柵瓣,但在該稀疏陣型中,適當的冗余設計使得柵瓣位置距成像區域較遠,對目標的重構圖像影響較小,如圖5(b)所示。
4 結 論
本文從QPS系統的口字型面陣結構出發,基于等效孔徑的概念,綜合考慮等效陣元分布均勻性與天線耦合作用等因素,研究了適用于毫米波近場成像的二維稀疏面陣結構。通過點擴展函數仿真證明了該陣型結構可以獲得與相同尺寸密集陣一致的理論分辨率,并利用原理驗證平臺完成了對復雜目標的三維成像,進一步證明了該陣型結構在毫米波波段的近場成像能力。下一步將開展對該陣型結構的系統集成以及快速成像算法的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01