基于寬帶雷達HRRP艦船目標長度估計算法
2018-09-27 11:36:54魏存?zhèn)?/span>段發(fā)階劉先康
系統(tǒng)工程與電子技術(shù) 2018年9期
魏存?zhèn)ィ伟l(fā)階,劉先康
(1.天津大學(xué)精密測試技術(shù)及儀器國家重點實驗室,天津300072; 2.中國人民解放軍海軍七〇一工廠,北京100015)
0 引 言
隨著寬帶雷達技術(shù)的進步與距離維度上分辨力的增強,目標各等效散射中心在雷達方位線上被分開,目標回波分布在多個距離單元上,表現(xiàn)為沿雷達方位線上的分布像,常稱為一維高分辨距離像(high range resolution profile,HRRP)[1-12]。HRRP是目標等效散射中心在方位線的投影,體現(xiàn)了目標等效散射中心位置及目標結(jié)構(gòu)之間的關(guān)系,是雷達自動目標識別(automatic target recognition,ATR)[13-20]和感知的重要途徑。寬帶雷達HRRP為雷達ATR帶來強有力的支撐,因而成為近年來國內(nèi)外研究的熱點[21-27]。
艦船目標HRRP數(shù)據(jù)面臨著姿態(tài)、幅度和平移3個方面的敏感性[8]問題,實際背景下加上海況、雷達架高、信號處理等各方面的影響更為復(fù)雜。目前,尚無直接采用HRRP不變性特征的有效提取方法[28],這也阻礙了雷達目標識別技術(shù)的應(yīng)用與發(fā)展。
本文針對艦船目標HRRP的特點,采用雷達跟蹤信息結(jié)合的方式提出一種船長特征提取方法,首先利用雷達跟蹤信息估計出姿態(tài)角及運動狀態(tài)特征,基于門限分割方法對艦船目標HRRP進行目標感興趣區(qū)域(region of interest,RoI)特征提取,利用估計的姿態(tài)角和像長映射出船長特征,經(jīng)過大量實測數(shù)據(jù)驗證表明,該方法實用、測長精度高,能夠?qū)ε灤瑢崿F(xiàn)粗分類,具有較好的穩(wěn)定性和工程應(yīng)用價值。
1 基于雷達航跡的艦船目標特征提取
1.1 艦船目標運動模型建立
圖1為艦船目標運動軌跡示意圖,設(shè)雷達提供的航跡位置為(R,A),其中R為距離信息,A為方位信息,艦船目標在短時間內(nèi)的運動規(guī)律可采用公式(1)中的二次曲線[29]表達
y=ax2+bx+c
(1)
式中,x=RsinA,y=RcosA,二次曲線的系數(shù)顯然可以用最小二乘(least squares measurement,LSM)方法進行估計。
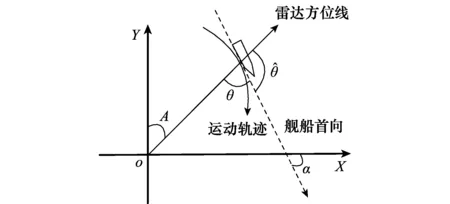
圖1 雷達艦船運動示意圖Fig.1 Radar ship movement diagram
1.2 基于雷達跟蹤信息的姿態(tài)角估計
在不考慮橫搖和縱搖的情況下,艦船目標的姿態(tài)角[7,29-30]可簡化為雷達視線與運動方向之間的夾角,其中艦船運動方向和艦船首向近似認為是一致的,也就是可用二次曲線擬合后的切線方向表示。
艦船目標的運動方向與X軸的夾角α可表示為

(2)

(3)
設(shè)θ為姿態(tài)角,定義為0~90°,如圖1所示,因此
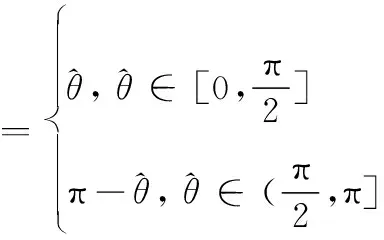
(4)
1.3 目標運動狀態(tài)估計
雷達輸出的跟蹤信息反映了艦船目標運動規(guī)律,在實際情況下,各種誤差的疊加或運動狀態(tài)的改變,造成了運動狀態(tài)的多樣性,因此,需要對艦船目標的運動狀態(tài)做出基本評估。首先定義方位變化率
/(N-1)
(5)
給出方位示性函數(shù)
(6)
若
∑Ri>δnum
(7)
則判為紊亂狀態(tài),其中,λ為方位閾值,δnum為異常數(shù)量門限。
設(shè)航向為φ,通過計算t、t-Δt時艦船目標位置,可以簡單判斷出基本運動方向,記作(ΔX,ΔY),根據(jù)式(2)及基本運動方向,則當(dāng)前時刻t航向為
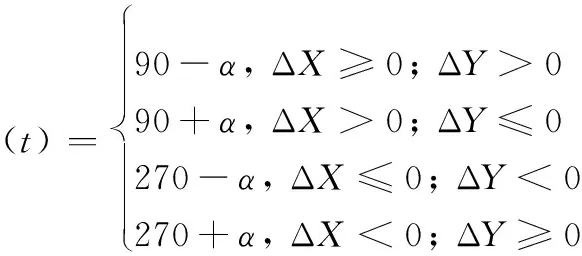
(8)
根據(jù)計算的航向,統(tǒng)計有關(guān)變化,如果滿足式(9)則運動狀態(tài)判為機動:
|φN-φ1|>Δφ
(9)
如果滿足式(10)則運動狀態(tài)判為穩(wěn)定:
|φN-φ1|≤Δφ
(10)
式中,Δφ為航向轉(zhuǎn)動角度閾值。
1.4 魯棒估計:M-estimator
式(1)中的艦船目標運動曲線參數(shù)可通過LSM方法估計,當(dāng)存在異常或較大誤差數(shù)據(jù)時,該方法穩(wěn)定性低,為了減少誤差以及野值點影響,可采用M-estimator算法提高估計參數(shù)的精度,M-estimator滿足式(11)最小,即
ρ(xi,w)
(11)
(12)
2 艦船目標HRRP像長特征提取
2.1 HRRP目標截像的判斷
寬帶雷達在成像過程中,由于距離窗口偏移或目標快速運動的原因,部分HRRP中的目標不完整或處于邊界位置,造成類似于截像現(xiàn)象,因此在處理之前需要預(yù)先判斷。用pm(i)表示第m幅艦船目標HRRP,其中i=1,2,…,N,N為維數(shù),統(tǒng)計出平均能量幅值和左右邊界能量幅值
/N
(13)
(14)
(15)
若滿足式(16)則判為截像

(16)
式中,k為左右邊界統(tǒng)計的距離單元個數(shù);th為閾值。
2.2 對HRRP進行距離對齊
對部分起始HRRP做平均處理,以處理后的像為基準,采用最大相關(guān)方法[7]進行對齊,令p1(i)和p2(i)為兩相鄰的艦船目標HRRP,則歸一化的相關(guān)系數(shù)可表示為
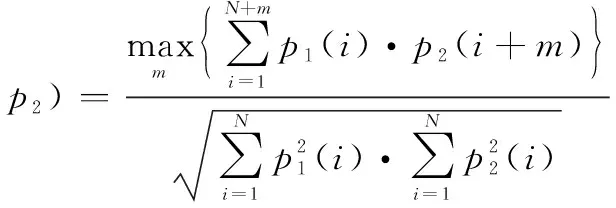
(17)
對p2(i)做平移對齊操作,如圖2所示。

圖2 艦船目標HRRP對齊前后對比圖Fig.2 Comparison chart of HRRP alignment
2.3 異常HRRP剔除
在成像過程中,少量HRRP受到噪聲或其他因素的影響造成失真現(xiàn)象,因此需進行異常判斷和剔除。設(shè)Pm={pm(1),pm(2),…,pm(N)}表示對齊后的HRRP,其中m=1,2,…,M,M、N表示幅數(shù)和維數(shù),顯然,平均像可表示為

(18)

(19)
若corrm<δ-Δδ,則判第Pm幅像存在異常,需進行剔除。
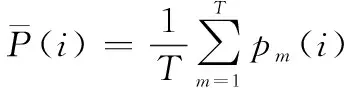
2.4 基準像計算
設(shè)Pm={pm(1),pm(2),…,pm(N)}為剔除異常數(shù)據(jù)后的HRRP,其中m=1,2,…,T,顯然,剔除后的數(shù)量T應(yīng)不大于M,則歸一化的基準像定義為
×255
(20)
2.5 計算目標的像長RoI
確定艦船目標HRRP的RoI也就是確定目標投影后的兩個端點,能夠準確地分割目標對于自動估計船長的精度起著特別重要的影響。對于HRRP的RoI提取大致有兩種分割方法,分別為基于最大信噪比(signal-to-noise ratio,SNR)準則滑窗分割法[28]和基于門限分割法。基于最大SNR準則的滑窗分割方法的原理是設(shè)置一定范圍的滑窗,滑窗內(nèi)的單元認為是目標的RoI,滑窗外的單元認為是雜波,計算滑窗內(nèi)的平均能量與滑窗外的平均能量的比值,當(dāng)比值達到最大時,認為該滑窗的位置為分割的RoI,這種方法的優(yōu)點是對于背景噪聲影響較小時如空中目標的分割具有良好的效果,而對于目標邊界不十分明顯時求取的RoI往往過小。
對于艦船目標HRRP,海雜波對目標邊界存在一定程度的干擾,甚至在噪聲較大時淹沒目標的邊界,本文側(cè)重于工程應(yīng)用,選用基于門限的分割方法確定RoI。首先對基準像求取期望
(21)
對基準像求強散射點數(shù)
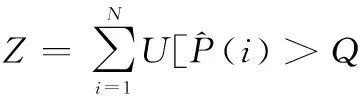

(22)
式中,U是單位階躍函數(shù);Z為強散射點數(shù);Q為門限系數(shù)。由于目標受到噪聲影響程度的不同,顯然門限系數(shù)不能為固定值,對于不同的SNR應(yīng)選擇不同的門限系數(shù),HRRP的SNR的定義為
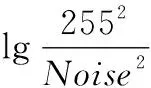
(23)
式中
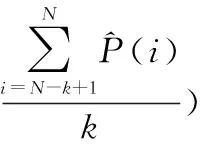
(24)
k為一定長度的距離單元數(shù)。

NT=L(Z)-L(1)+1
(25)
3 艦船目標船長估計
寬帶雷達艦船目標HRRP的分辨率由電磁波傳播速度和帶寬決定,記寬帶雷達帶寬為B,距離分辨率為ΔR,速度為c,則滿足ΔR=c/2B。顯然,艦船目標在雷達方位線上的投影LP可表示為
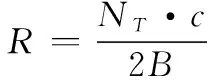
(26)
式中,NT為HRRP的RoI的距離單元數(shù)。
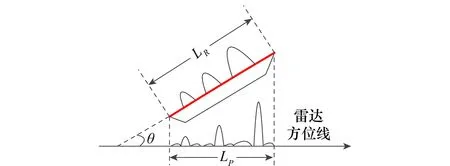
圖3 艦船目標在雷達視線方向上投影關(guān)系示意圖Fig.3 Schematic diagram of ship target projection relationship in radar sight direction
從圖3可以看出HRRP實際上為艦船目標在雷達視線方向的投影,由姿態(tài)角θ和像長LP依據(jù)三角函數(shù)關(guān)系即可計算出船長,記船長為LR,即
(27)

(28)
圖4為本文算法船長估計流程圖。
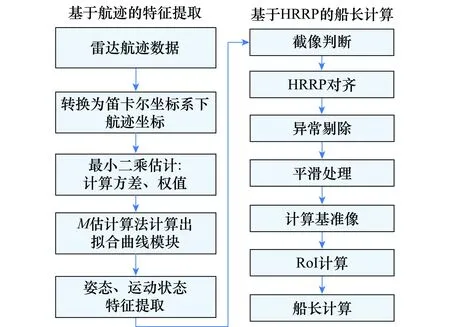
圖4 算法處理流程圖Fig.4 Algorithm processing flow chart
4 實驗結(jié)果

(29)
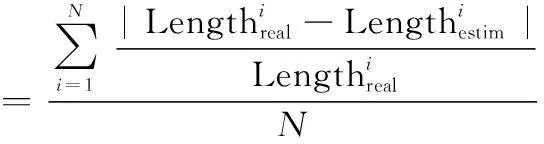
本文采用某型號警戒雷達采集到的10艘艦船實測數(shù)據(jù)進行驗證,共采集實測HRRP數(shù)據(jù)2 200條及對應(yīng)跟蹤信息。艦船目標尺寸真值如表1所示,真值來源為艦船自動識別系統(tǒng)(automatic identification system, AIS)所報。由于低SNR下目標邊界特征的模糊性,本文采集的測試用數(shù)據(jù)SNR不低于25 dB。根據(jù)式(24),統(tǒng)計艦船目標HRRP數(shù)據(jù)平均測長誤差均值為9.85%,從測長誤差角度來看自動估計的長度特征具有一定的高精度,效果還是不錯的。寬帶雷達HRRP能夠反映出艦船目標的幾何結(jié)構(gòu)及形狀特征,但目前尚無方法直接利用HRRP提取出艦船目標的不變特征,徑向長度是雷達目標識別最直觀的幾何形狀特征,結(jié)合雷達跟蹤信息進行船長估計能夠提取出有效的穩(wěn)定特征,對于寬帶雷達艦船目標自動目標識別有著重要的作用和意義。
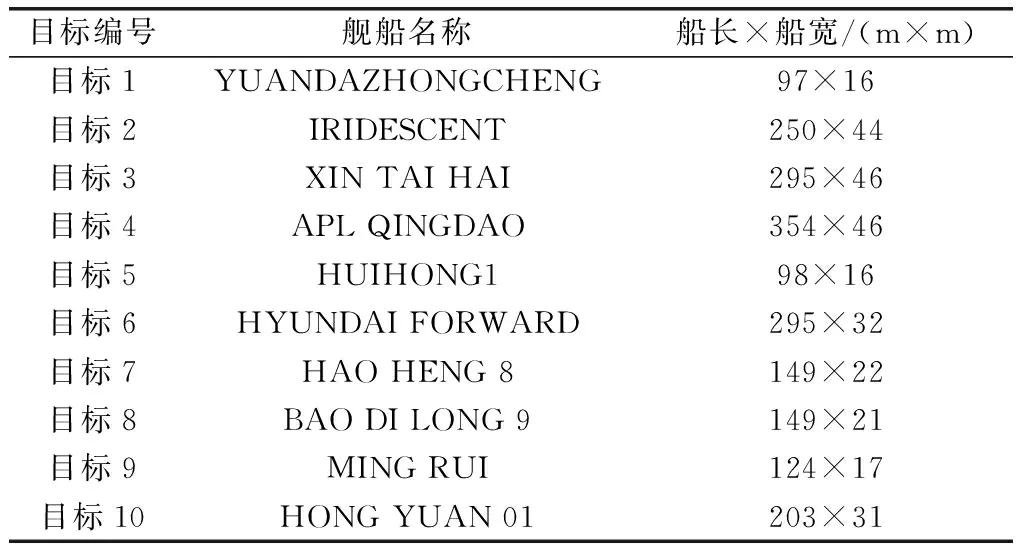
表1 外場試驗的艦船尺寸數(shù)據(jù)
圖5為部分數(shù)據(jù)自動測長誤差示意圖,從圖中可以看出部分數(shù)據(jù)自動測長誤差較大,這是因為受到海雜波干擾的影響,會造成目標邊界端點的弱化或淹沒,目標區(qū)域分割不準,從而導(dǎo)致一定程度的測長誤差,對于這類和低SNR下的HRRP數(shù)據(jù),在實際使用過程中,自動估計算法存在較大的難度,可以通過人工修正的方式確定出目標的RoI,從而估計出相對穩(wěn)定的船長。由于本文采用基于門限的艦船目標RoI分割方法,這種方法的缺陷是依賴于門限閾值,如何提高艦船目標分割的自適應(yīng)性以及低SNR下艦船目標HRRP自動分割問題,是船長特征提取的難點所在。
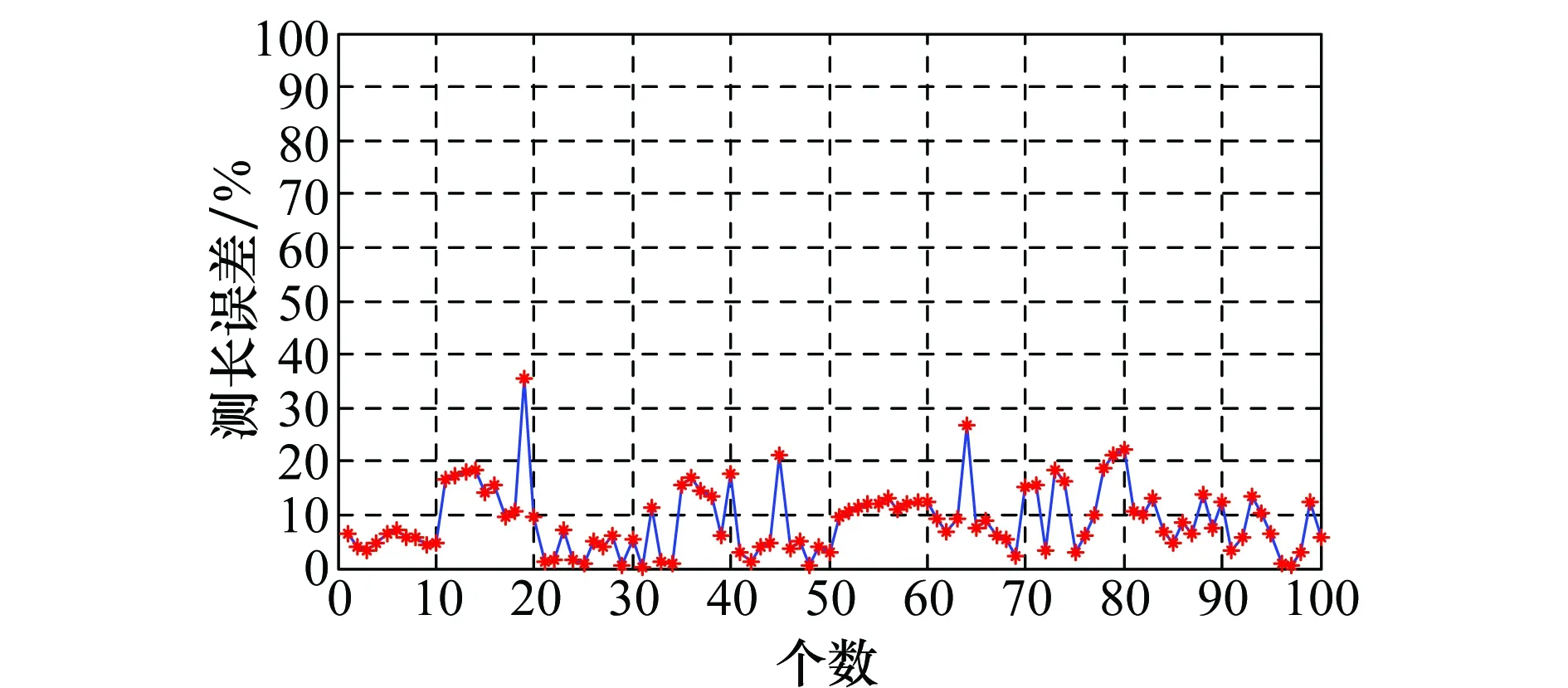
圖5 部分實測數(shù)據(jù)船長誤差示意圖Fig.5 Length measurement error diagram
本文算法在普通計算機(操作系統(tǒng):Win XP,處理器:2.66 GHz,4 G內(nèi)存)上采用VS2010開發(fā)平臺下實驗,處理每組HRRP及對應(yīng)跟蹤信息的平均耗時約為15.5 ms,基本能滿足實時性的要求。
5 結(jié)束語
本文提出了一種利用雷達跟蹤信息及HRRP的艦船長度穩(wěn)定特征提取算法,該方法首先通過雷達跟蹤信息提取出目標的姿態(tài)角、運動狀態(tài)、航向特征,通過相鄰相關(guān)法實現(xiàn)目標的對齊及剔除異常HRRP,效果較好,采用基于門限的分割方法實現(xiàn)RoI的分割,能夠準確有效地提取目標的像長,該方法具有一定的自適應(yīng)性,根據(jù)工程實踐及經(jīng)驗建立的投影準則,能夠滿足高精度的船長估計。本文方法實用、測長精度高,在寬帶雷達自動目標識別領(lǐng)域具有較高的工程應(yīng)用價值。
猜你喜歡
艦船科學(xué)技術(shù)(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
兒童故事畫報(2019年5期)2019-05-26 14:26:14
電子制作(2018年19期)2018-11-14 02:37:08
自動化學(xué)報(2017年11期)2017-04-04 02:52:58
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
噪聲與振動控制(2015年4期)2015-01-01 07:08:21