一種基于PWM的音圈電機(jī)改進(jìn)控制方法
2018-09-28 06:11:58夏潤(rùn)秋王德釗
微特電機(jī) 2018年9期
周 平,呂 勇,夏潤(rùn)秋,王德釗
(北京信息科技大學(xué),北京 100192)
0 引 言
音圈電機(jī)是單相兩極裝置,是一種通過(guò)安培力驅(qū)動(dòng)的線性運(yùn)動(dòng)電機(jī)[1-3],具有結(jié)構(gòu)簡(jiǎn)單、響應(yīng)快、運(yùn)動(dòng)精度高等特性[4]。隨著對(duì)高速、高精度定位系統(tǒng)性能要求的提高,以及音圈電機(jī)技術(shù)的迅速發(fā)展,音圈電機(jī)被廣泛用于高速、高精度系統(tǒng)中,例如高檔數(shù)控機(jī)床、光學(xué)電子顯微鏡[5]、醫(yī)學(xué)裝置中精密電子管及光學(xué)系統(tǒng)中透鏡定位等。
音圈電機(jī)的驅(qū)動(dòng)方式有2種,一種是直接通過(guò)線性功率放大器驅(qū)動(dòng),它的不足之處在于線性功率放大器驅(qū)動(dòng)音圈電機(jī)工作時(shí)器件功耗大,尤其在密閉的環(huán)境中散熱成為問(wèn)題,小功率音圈電機(jī)常用這種驅(qū)動(dòng)方式[6];另一種驅(qū)動(dòng)方式為開(kāi)關(guān)型脈寬寬度調(diào)制式(以下簡(jiǎn)稱PWM),PWM穩(wěn)壓電路是在控制電路輸出頻率不變的情況下,通過(guò)電壓反饋調(diào)整其占空比,從而達(dá)到穩(wěn)定輸出電壓的目的。它具有實(shí)現(xiàn)容易、控制簡(jiǎn)單、動(dòng)態(tài)響應(yīng)好、控制精度高等優(yōu)點(diǎn)[7],PWM驅(qū)動(dòng)音圈電機(jī)方式廣泛應(yīng)用于自動(dòng)控制系統(tǒng)中。文獻(xiàn)[8]采用PWM驅(qū)動(dòng)音圈電機(jī)的方式控制快速反射鏡系統(tǒng),系統(tǒng)帶寬達(dá)到150 Hz以上;文獻(xiàn)[9]利用PWM設(shè)計(jì)了基于音圈電機(jī)的直驅(qū)閥閥心位置控制系統(tǒng)等。由于音圈電機(jī)在高速精密定位控制中存在多種非線性因素,如摩擦力、死區(qū)和遲滯特性等[10],當(dāng)輸入的PWM信號(hào)占空比較小時(shí),PWM信號(hào)驅(qū)動(dòng)的音圈電機(jī)運(yùn)動(dòng)效率較低,系統(tǒng)無(wú)法獲得理想的動(dòng)態(tài)特性,直接采用傳統(tǒng)的閉環(huán)控制算法難以滿足高動(dòng)態(tài)特性要求。目前國(guó)內(nèi)外對(duì)低占空比PWM信號(hào)驅(qū)動(dòng)音圈電機(jī)的特性研究較少,本文提出一種改進(jìn)閉環(huán)控制算法,降低由于PWM驅(qū)動(dòng)信號(hào)占空比減小對(duì)音圈電機(jī)動(dòng)態(tài)特性帶來(lái)的影響,并將該算法應(yīng)用于高速精密光束指向系統(tǒng)。
1 PWM信號(hào)驅(qū)動(dòng)的音圈電機(jī)工作特性
音圈電機(jī)在高頻高速運(yùn)動(dòng)中具有非線性的復(fù)雜特性,尤其帶負(fù)載運(yùn)動(dòng)時(shí),存在動(dòng)靜摩擦力[11]。高頻率運(yùn)動(dòng)下,音圈電機(jī)中的磁體電流、摩擦力和重力場(chǎng)等非線性因素嚴(yán)重影響著音圈電機(jī)的執(zhí)行效率[12],而小占空比PWM信號(hào)產(chǎn)生的驅(qū)動(dòng)電流較小,不足以驅(qū)動(dòng)音圈電機(jī)克服上述阻尼實(shí)現(xiàn)線性運(yùn)動(dòng),PWM信號(hào)驅(qū)動(dòng)音圈電機(jī)未發(fā)生任何位移的占空比范圍為PWM占空比“控制死區(qū)”。
為了準(zhǔn)確了解音圈電機(jī)在不同占空比PWM信號(hào)驅(qū)動(dòng)下的工作特性,以某款音圈電機(jī)為例,開(kāi)環(huán)狀態(tài)下,給定音圈電機(jī)不同占空比的PWM信號(hào),獲取了音圈電機(jī)歸一化行程與PWM信號(hào)占空比之間的關(guān)系。測(cè)試結(jié)果如圖1所示,其中音圈電機(jī)行程的正負(fù)表示音圈電機(jī)移動(dòng)的方向,音圈電機(jī)為“1”表示音圈電機(jī)滿量程,為“0”表示音圈電機(jī)處于初始位置。

圖1 PWM占空比與音圈電機(jī)位移關(guān)系
由圖1可以看出,開(kāi)環(huán)狀態(tài)下,PWM占空比在-0.05~0.05范圍內(nèi),音圈電機(jī)未發(fā)生任何位移,該段即為PWM占空比“控制死區(qū)”。在該范圍外,音圈電機(jī)的位移量隨著PWM占空比的增加呈線性變化。在PWM占空比“控制死區(qū)”內(nèi),由于音圈電機(jī)不能產(chǎn)生任何響應(yīng),PWM驅(qū)動(dòng)的音圈電機(jī)伺服系統(tǒng)利用常規(guī)PID控制算法不能達(dá)到快速精確的性能要求。
2 改進(jìn)雙閉環(huán)控制算法原理
在電機(jī)控制中,雙閉環(huán)控制算法基于經(jīng)典PID控制算法的思想實(shí)現(xiàn),一般由電流環(huán)和電壓環(huán)構(gòu)成[13-17],或由電流環(huán)和速度環(huán)組成[18-19]。其中電流環(huán)作為內(nèi)環(huán),通過(guò)控制電流來(lái)提高系統(tǒng)的性能;電壓環(huán)或速度環(huán)作為外環(huán),控制系統(tǒng)精確達(dá)到目標(biāo)位置。雙閉環(huán)算法使得系統(tǒng)性能得到較大提高。但由于電流環(huán)和位置環(huán)均需要獨(dú)立的反饋裝置,增強(qiáng)了系統(tǒng)設(shè)計(jì)的復(fù)雜性。本文提出一種改進(jìn)雙閉環(huán)控制算法,用于應(yīng)對(duì)PWM占空比“控制死區(qū)”缺陷。改進(jìn)雙閉環(huán)控制算法的結(jié)構(gòu)如圖2所示。 該算法采用位置環(huán)和速度環(huán)相結(jié)合的方式,通過(guò)位置環(huán)實(shí)現(xiàn)對(duì)音圈電機(jī)伺服系統(tǒng)位置控制;速度環(huán)反饋量與位置偏差量相關(guān),根據(jù)音圈電機(jī)移動(dòng)速度的大小實(shí)現(xiàn)對(duì)位置環(huán)中PID算法積分環(huán)節(jié)控制。

圖2 改進(jìn)雙閉環(huán)控制算法結(jié)構(gòu)圖

改進(jìn)雙閉環(huán)控制算法位置環(huán)的輸入變量為期望值r(k)與輸出值u(k)之間產(chǎn)生偏差信號(hào)e(k),位置PID控制器根據(jù)偏差信號(hào)e(k)計(jì)算輸出值y(k),進(jìn)而將輸出值y(k)對(duì)應(yīng)的PWM占空比驅(qū)動(dòng)音圈電機(jī)產(chǎn)生偏移。其中位置PID控制器公式[20]:
(1)
同時(shí),產(chǎn)生的偏差信號(hào)e(k)與期望的速度v(k)做差分,產(chǎn)生速度偏差信號(hào)ve(k),并根據(jù)測(cè)試占空比死區(qū)對(duì)應(yīng)的音圈電機(jī)位移范圍[UnegUpos],判斷音圈電機(jī)當(dāng)前位置是否處于占空比死區(qū)范圍內(nèi),如果處于該范圍內(nèi),G(x)的值為1,輸出信號(hào)v(k)為1,I(k)為v2(k)與v1(k)的乘積,W(k)為e(k)與v4(k)的乘積,則將速度偏差信號(hào)作為速度環(huán)的輸入信號(hào),并將計(jì)算后輸出結(jié)果M疊加在位置PID控制器上,從而實(shí)現(xiàn)雙閉環(huán)控制。其中期望速度v(k)根據(jù)音圈電機(jī)位置位于[UnegUpos]范圍臨界區(qū)前一時(shí)刻速度v(k-1)確定,并在[UnegUpos]范圍內(nèi)保持該速度不變;超出該范圍后,G(x)的值為0,速度環(huán)控制失效。v(k)取值如下:
(2)
速度環(huán)輸出結(jié)果M的取值如下:
(3)
式中:Ks為速度環(huán)中比例系數(shù);KI為“速度環(huán)中積分系數(shù)。則整個(gè)控制器輸出表達(dá)式:
(4)
改進(jìn)雙閉環(huán)算法的流程圖如圖3所示。
改進(jìn)雙閉環(huán)算法降低了系統(tǒng)設(shè)計(jì)的復(fù)雜性,同時(shí)該算法對(duì)于占空比死區(qū)范圍外部分,速度環(huán)作用消失,不影響位置環(huán)PID控制參數(shù),使得控制算法中各項(xiàng)參數(shù)能夠獨(dú)立調(diào)節(jié),參數(shù)整定容易。

圖3 改進(jìn)雙閉環(huán)算法流程圖
3 實(shí)驗(yàn)驗(yàn)證
搭建高速精密光束指向系統(tǒng),系統(tǒng)結(jié)構(gòu)如圖4所示,由兩兩相互對(duì)稱的4個(gè)音圈電機(jī)通過(guò)柔性鉸鏈連接反射鏡組成。音圈電機(jī)采用推拉的方式控制反射鏡偏轉(zhuǎn)到指定角度。其中沿豎直方向?qū)ΨQ的一組音圈電機(jī)控制反射鏡沿x軸方向移動(dòng),水平方向?qū)ΨQ的一組音圈電機(jī)控制反射鏡沿y軸方向移動(dòng)。通過(guò)2組音圈電機(jī)相互作用,系統(tǒng)可以偏轉(zhuǎn)到任意方向指定的角度。
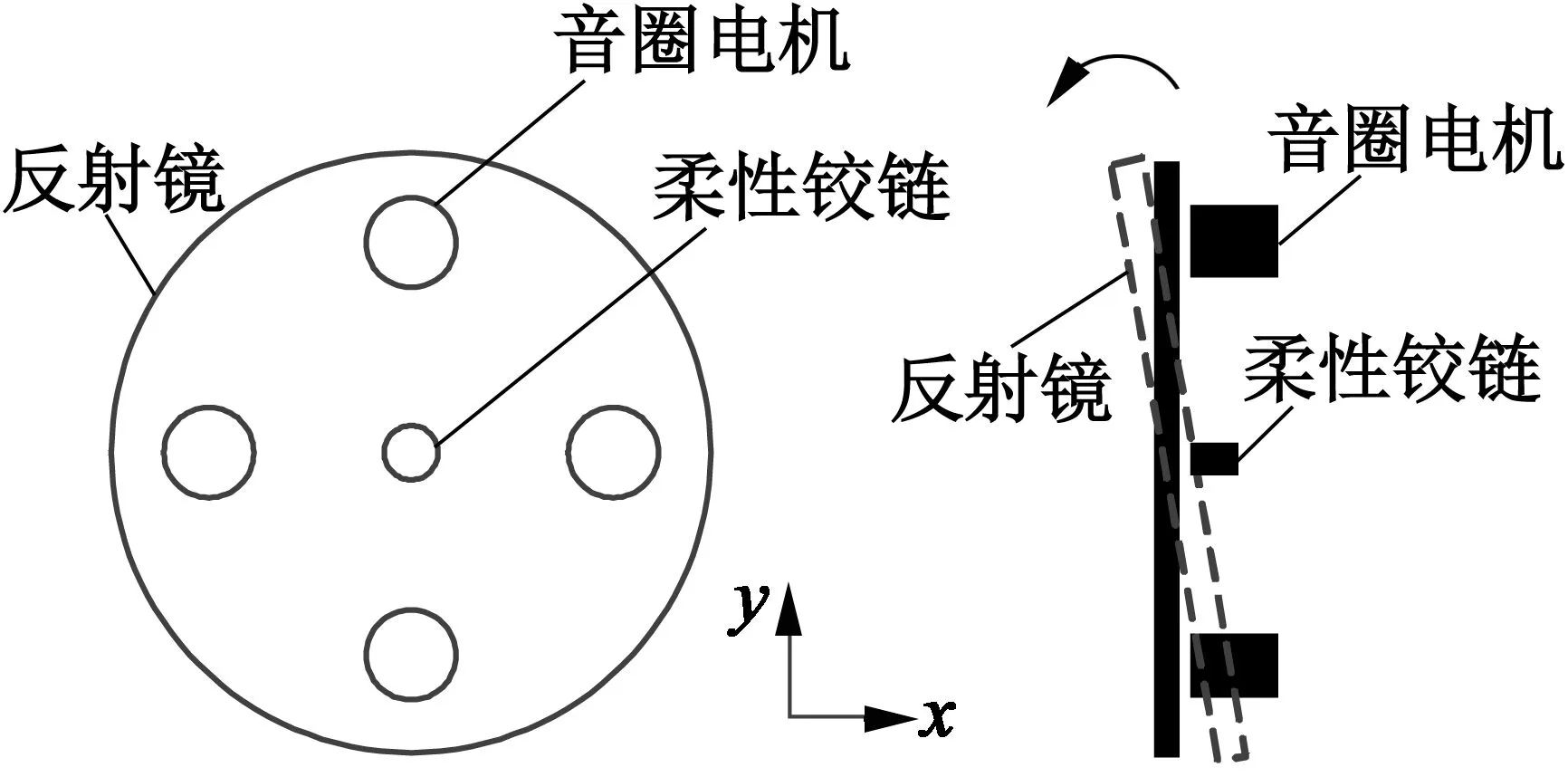
圖4 高速精密光束指向系統(tǒng)結(jié)構(gòu)圖
將改進(jìn)雙閉環(huán)控制算法和常規(guī)算法分別應(yīng)用于該系統(tǒng)中,分別調(diào)整改進(jìn)雙閉環(huán)控制算法和常規(guī)算法中的各項(xiàng)參數(shù),并給定系統(tǒng)階躍信號(hào),使得PWM信號(hào)占空比變化區(qū)間包含占空比“控制死區(qū)”,獲取了2種算法階躍響應(yīng)控制曲線,如圖5所示。

圖5 改進(jìn)雙閉環(huán)算法和常規(guī)算法階躍響應(yīng)曲線
圖5以時(shí)間為橫軸,高速精密光束指向系統(tǒng)偏移角度為縱軸繪制曲線。從圖5可以看出,在系統(tǒng)穩(wěn)態(tài)誤差1%允許范圍內(nèi),常規(guī)PID控制算法控制的系統(tǒng)產(chǎn)生階躍響應(yīng)調(diào)節(jié)時(shí)間為0.046 s,控制時(shí)間較長(zhǎng),且系統(tǒng)振蕩嚴(yán)重,動(dòng)態(tài)性能較差,控制效果不理想。改進(jìn)雙閉環(huán)算法控制的系統(tǒng)調(diào)節(jié)時(shí)間為0.016 s,將系統(tǒng)的調(diào)節(jié)時(shí)間縮短了約65%;同時(shí)系統(tǒng)控制過(guò)程中振蕩也得到較大的削弱。由此可見(jiàn),改進(jìn)雙閉環(huán)算法提高了高速精密光束指向系統(tǒng)的動(dòng)態(tài)性能,在經(jīng)過(guò)占空比“控制死區(qū)”時(shí)的控制性能優(yōu)于常規(guī)PID算法的控制性能。
4 結(jié) 語(yǔ)
本文結(jié)合PWM驅(qū)動(dòng)音圈電機(jī)線性運(yùn)動(dòng)的特性,針對(duì)PWM控制的音圈電機(jī)存在占空比死區(qū)問(wèn)題,提出了改進(jìn)雙閉環(huán)控制算法,并將該算法應(yīng)用于高速精密光束指向系統(tǒng)。當(dāng)音圈電機(jī)位置處于占空比“死區(qū)”時(shí),該算法不僅降低了該“死區(qū)”對(duì)整個(gè)控制回路的影響,將系統(tǒng)的調(diào)節(jié)時(shí)間縮短了約65%,還使系統(tǒng)在死區(qū)范圍內(nèi)振蕩得到削弱,提高了系統(tǒng)的穩(wěn)定性。
改進(jìn)雙閉環(huán)控制算法不僅適用于高速精密光束指向系統(tǒng),同時(shí)還可以用于PWM控制的其他伺服控制系統(tǒng)中,不但能提高控制系統(tǒng)的動(dòng)態(tài)響應(yīng)特性,還增強(qiáng)了系統(tǒng)的魯棒性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
