基于凹函數(shù)的BLDCM滑模觀測(cè)器控制研究
2018-09-28 06:16:54仇志堅(jiān)
微特電機(jī) 2018年9期
陳 威,仇志堅(jiān)
(上海大學(xué),上海 200072)
0 引 言
無刷直流電動(dòng)機(jī)(以下簡(jiǎn)稱BLDCM)具有體積小、質(zhì)量輕、功率密度高、控制簡(jiǎn)單等特點(diǎn),其無位置傳感器控制由于成本低,不受工作場(chǎng)合限制,現(xiàn)已成為BLDCM的研究熱點(diǎn)[1-3]。
現(xiàn)有的研究都沒有系統(tǒng)討論在不同控制函數(shù)情況下的觀測(cè)反電動(dòng)勢(shì)抖振,為了定量分析反電動(dòng)勢(shì)的抖振,首先對(duì)已有的控制函數(shù)進(jìn)行了歸納分析,提出了一種凹控制函數(shù),并理論證明了采用凹控制函數(shù)比已有的控制函數(shù)得到的觀測(cè)反電動(dòng)勢(shì)抖振更小。其次,將該凹控制函數(shù)作為滑模觀測(cè)器中的控制函數(shù),并用歸一化方法處理估算反電動(dòng)勢(shì),利用鎖相環(huán)提取轉(zhuǎn)速和轉(zhuǎn)角信息,構(gòu)建了BLDCM的無位置傳感器控制系統(tǒng)。
1 BLDCM數(shù)學(xué)模型
兩相靜止坐標(biāo)系下的BLDCM的數(shù)學(xué)模型如下:
(1)
式中:uα,uβ,iα,iβ,eα,eβ分別為α,β坐標(biāo)系下的繞組電壓、電流和反電動(dòng)勢(shì);L1為每相定子繞組的等效電感;R為定子電阻。
取式(1)中的定子繞組電流和反電動(dòng)勢(shì)作為系統(tǒng)的狀態(tài)變量,將繞組電壓和繞組電流分別作為系統(tǒng)的輸入和輸出,并考慮到在電機(jī)控制系統(tǒng)中,采用周期遠(yuǎn)遠(yuǎn)小于電機(jī)的機(jī)械和電磁時(shí)間常數(shù),可認(rèn)為在采用過程中電機(jī)角速度不變,反電動(dòng)勢(shì)的導(dǎo)數(shù)為零,則由式(1)可得BLDCM的狀態(tài)方程和輸出方程:
(2)
y=C[ie]
(3)
2 BLDCM無位置傳感器控制
2.1 反電動(dòng)勢(shì)滑模觀測(cè)器設(shè)計(jì)
在電機(jī)運(yùn)行時(shí),若忽略電樞反應(yīng)影響,可認(rèn)為電機(jī)繞組電感值不變,則由式(2)構(gòu)建的反電動(dòng)勢(shì)滑模觀測(cè)器方程如下:
(4)
選擇滑模面:
(5)
將式(4)減去式(2),可得滑模觀測(cè)器的誤差方程:
(6)

(7)
對(duì)式(7)求導(dǎo),得其導(dǎo)數(shù):
(8)


(9)
由于在滑模觀測(cè)器中,選用的控制函數(shù)值域?yàn)閇-1 1],且H(x)與x符號(hào)相同,結(jié)合不等式的性質(zhì)可得:

故只需式(10)小于0,就能保證滑模觀測(cè)器進(jìn)入滑模面,即:
(11)
(12)
將式(12)代入式(6),得:
(13)

(14)
為求得g1,g2的范圍,重新構(gòu)造一個(gè)Lyapunov方程:
(15)
對(duì)式(15)求導(dǎo),并將式(13)代入,可得:
(16)

(17)
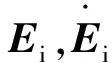
從式(11)、式(17)可知,只需選擇合適的k1,k2,g1,g2參數(shù),就能保證滑模觀測(cè)器的觀測(cè)值收斂到實(shí)際值。圖1為滑模觀測(cè)器的結(jié)構(gòu)框圖。
圖1 滑模觀測(cè)器結(jié)構(gòu)框圖
2.2 不同控制函數(shù)的抖振分析
(a) 符號(hào)函數(shù)
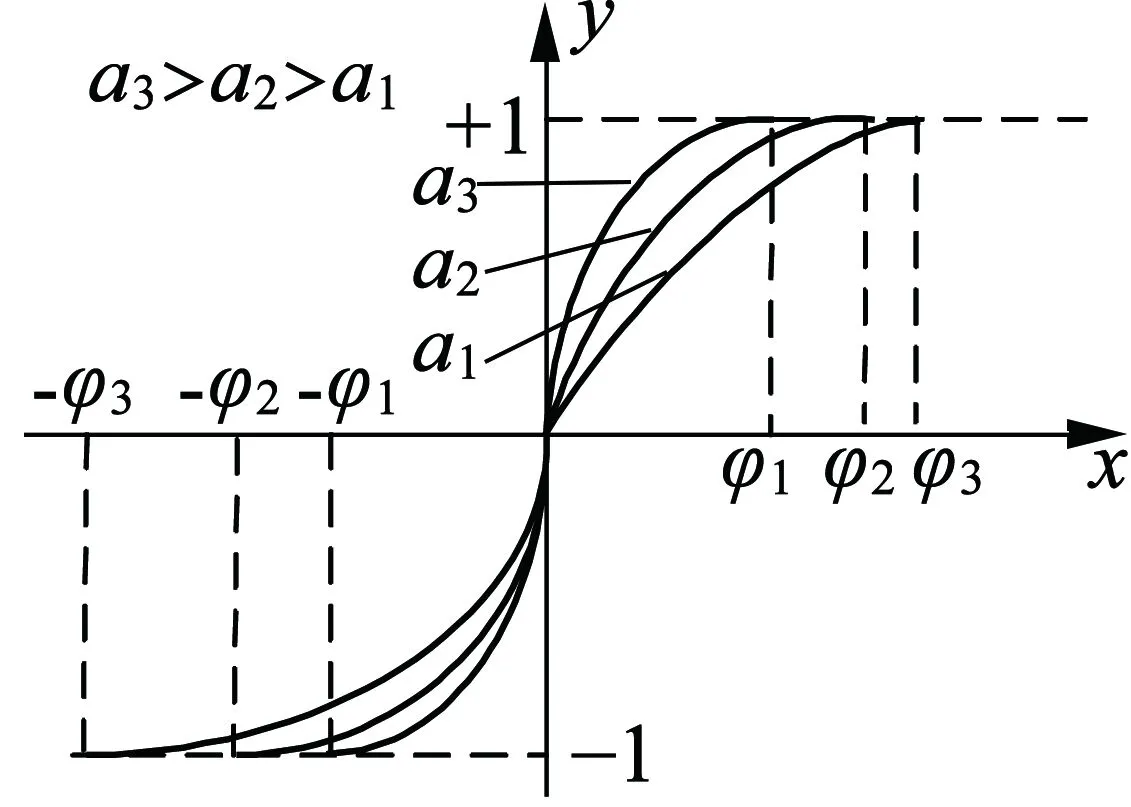
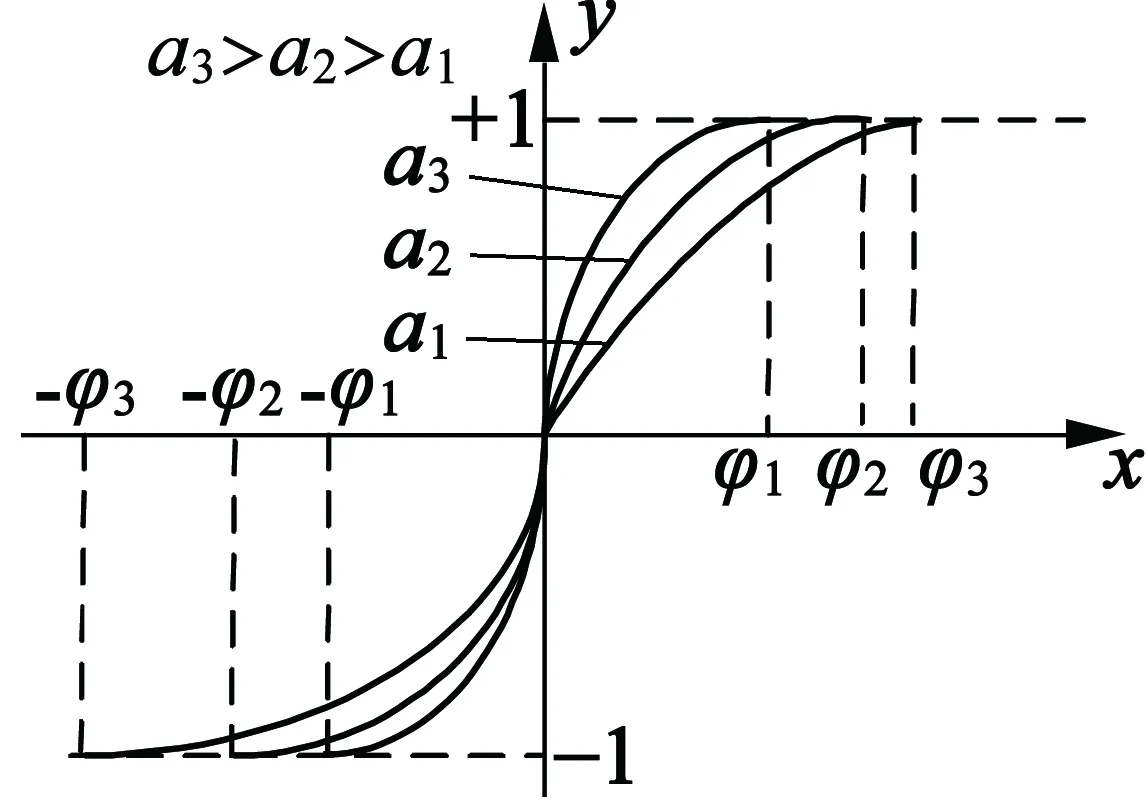
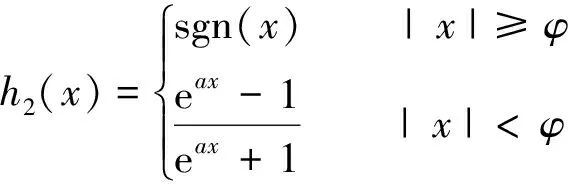
(b) e的指數(shù)函數(shù)
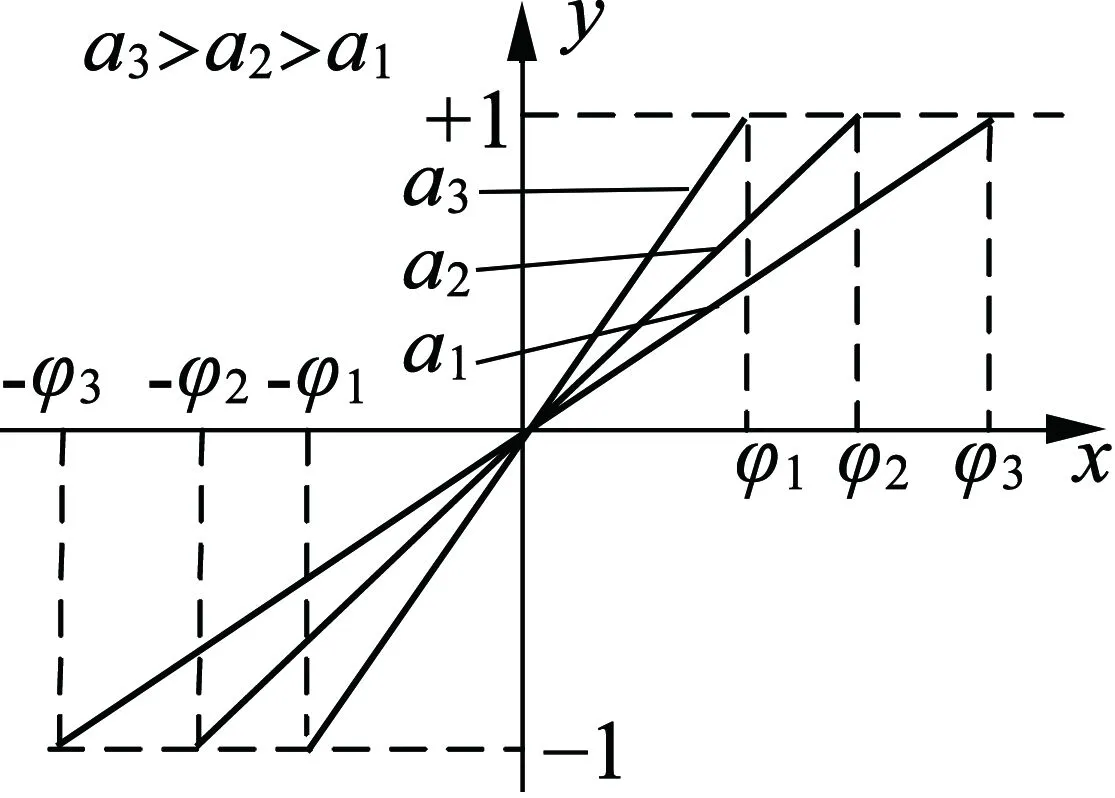
(c) 飽和函數(shù)
(d) 正弦函數(shù)
已有的控制函數(shù)可以分為符號(hào)函數(shù),e的指數(shù)函數(shù),飽和函數(shù),正弦函數(shù),曲線如圖2所示。數(shù)學(xué)表達(dá)式如下:
(18)
(19)

(20)
(21)
式(19)中,當(dāng)a分別取1,2時(shí),即為sigmoid函數(shù)和雙曲正切函數(shù)tanh。
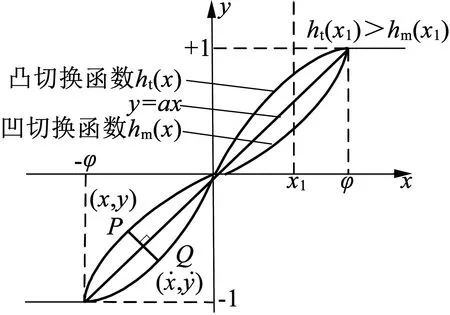
圖3 凹、凸控制函數(shù)
觀察圖2的函數(shù)圖像可得,當(dāng)a越大時(shí),在邊界層內(nèi)控制函數(shù)的坡度越陡,越接近符號(hào)函數(shù),抖振越大。分別對(duì)上述函數(shù)求其一階、二階導(dǎo)數(shù),由高等數(shù)學(xué)中函數(shù)凹凸性定義可知,e的指數(shù)函數(shù)和正弦函數(shù)在邊界層內(nèi)為凸函數(shù)。本文現(xiàn)提出一種凹控制函數(shù),該凹控制函數(shù)與其凸控制函數(shù)關(guān)于y=ax對(duì)稱,具體圖形如圖3所示。現(xiàn)定量地推導(dǎo)凹、凸控制函數(shù)的反電動(dòng)勢(shì)抖振數(shù)學(xué)表達(dá)式,為敘述方便,凹、凸控制函數(shù)分別記為hm(x)與ht(x),定義反電動(dòng)勢(shì)的抖振:
(22)
依式(22)可計(jì)算得到,分別采用凸、凹控制函數(shù)作為滑模觀測(cè)器的控制函數(shù)情況下,反電動(dòng)抖振分別如下:
(23)

(24)
式中:下角標(biāo)t,m分別表示凸、凹控制函數(shù)的變量。將式(23)與式(24)作差,得到:
根據(jù)式(14),且依據(jù)在邊界層內(nèi),滑模觀測(cè)器中的控制函數(shù)過零點(diǎn),可計(jì)算得到:
(26)

(27)
將式(26)、式(27)分別作差、相加,可分別得到:
(28)

(29)
由于在邊界層內(nèi)h(x)與x同號(hào),且|ht(Ei)|大于|hm(Ei)|,因此式(28)、式(29)都大于0。而β方向的變量與α方向變量具有相同的性質(zhì),因此也可得到:
將上式代入式(25),得到:
(30)
故在邊界層內(nèi)對(duì)于任意的Ei,都恒有Δet大于Δem成立。因此,在其他條件相同的情況下,選用凹控制函數(shù),能降低觀測(cè)反電動(dòng)勢(shì)的抖振。
本文以正弦函數(shù)為例,其數(shù)學(xué)表達(dá)式見式(21),其中將其凹切換函數(shù)記為g4(x),根據(jù)曲線f(x,y)=0關(guān)于直線y=kx+b對(duì)稱的曲線方程:
可求得正弦函數(shù)h4(x)關(guān)于y=ax對(duì)稱的凹控制函數(shù)g4(x)應(yīng)滿足:

(31)
式(31)是隱函數(shù),無法直接求得解析解,現(xiàn)考慮sin(ax)的麥克勞林展開式,并忽略高次項(xiàng),運(yùn)用MATLAB軟件,解出顯函數(shù)表達(dá)式。
2.3 反電動(dòng)勢(shì)歸一化處理和轉(zhuǎn)子速度及轉(zhuǎn)角計(jì)算
由于BLDCM的氣隙磁場(chǎng)為梯形波,a,b,c坐標(biāo)系下的反電動(dòng)勢(shì)變換到α,β坐標(biāo)系下也不是正弦波,若直接用該反電動(dòng)勢(shì)提取轉(zhuǎn)子位置角和轉(zhuǎn)速信息,誤差較大,計(jì)算精度不高。為此,采用式(32)對(duì)滑模觀測(cè)器的觀測(cè)反電動(dòng)勢(shì)進(jìn)行歸一化處理[10],以降低其中的高次諧波含量,并消除磁鏈和角速度的影響,獲取類似于正弦波形的基波信號(hào)。
(32)

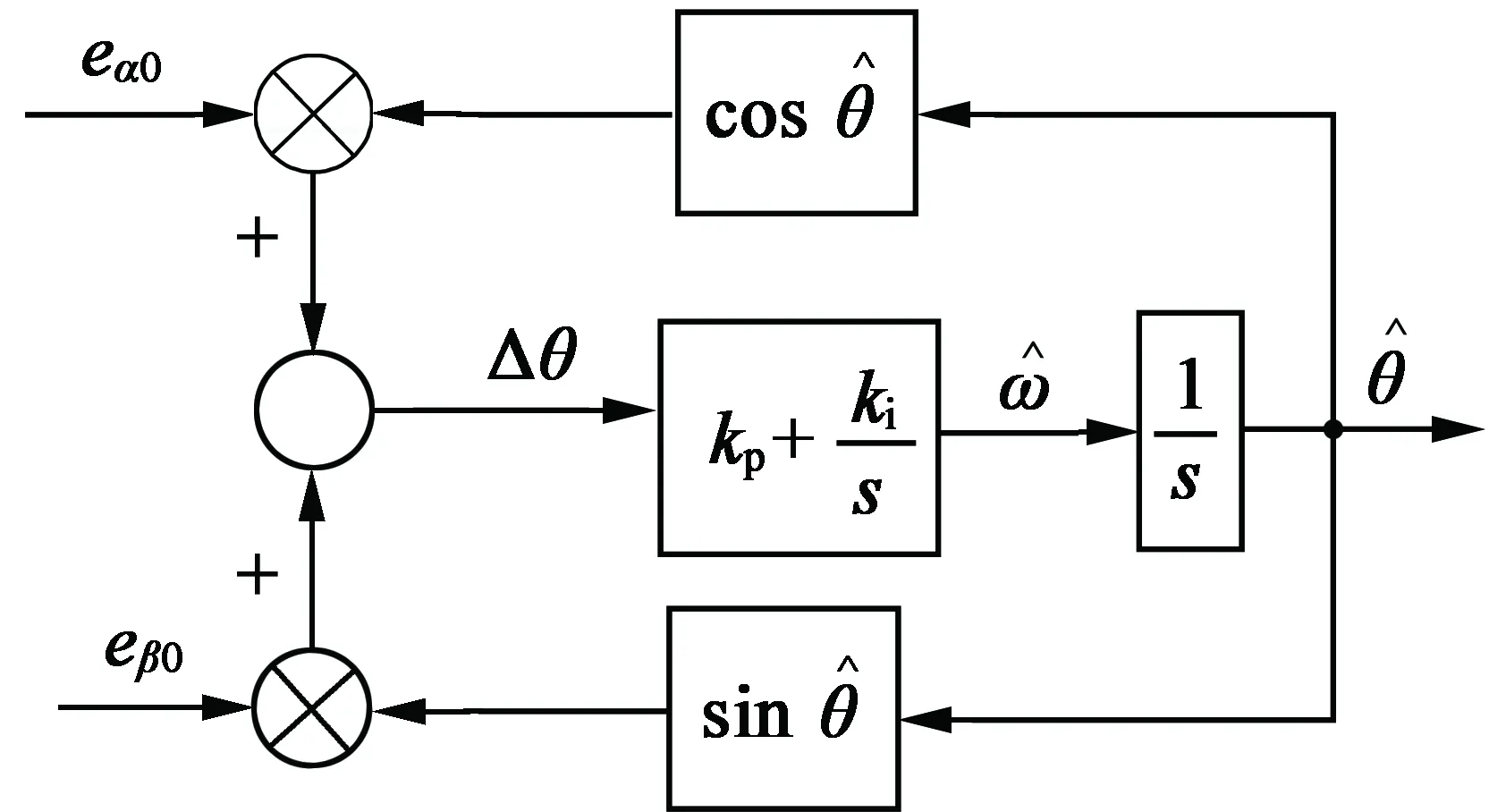
圖4 鎖相環(huán)原理框圖
由圖4可知:
(33)


(34)

2.4 BLDCM的無位置傳感器控制系統(tǒng)
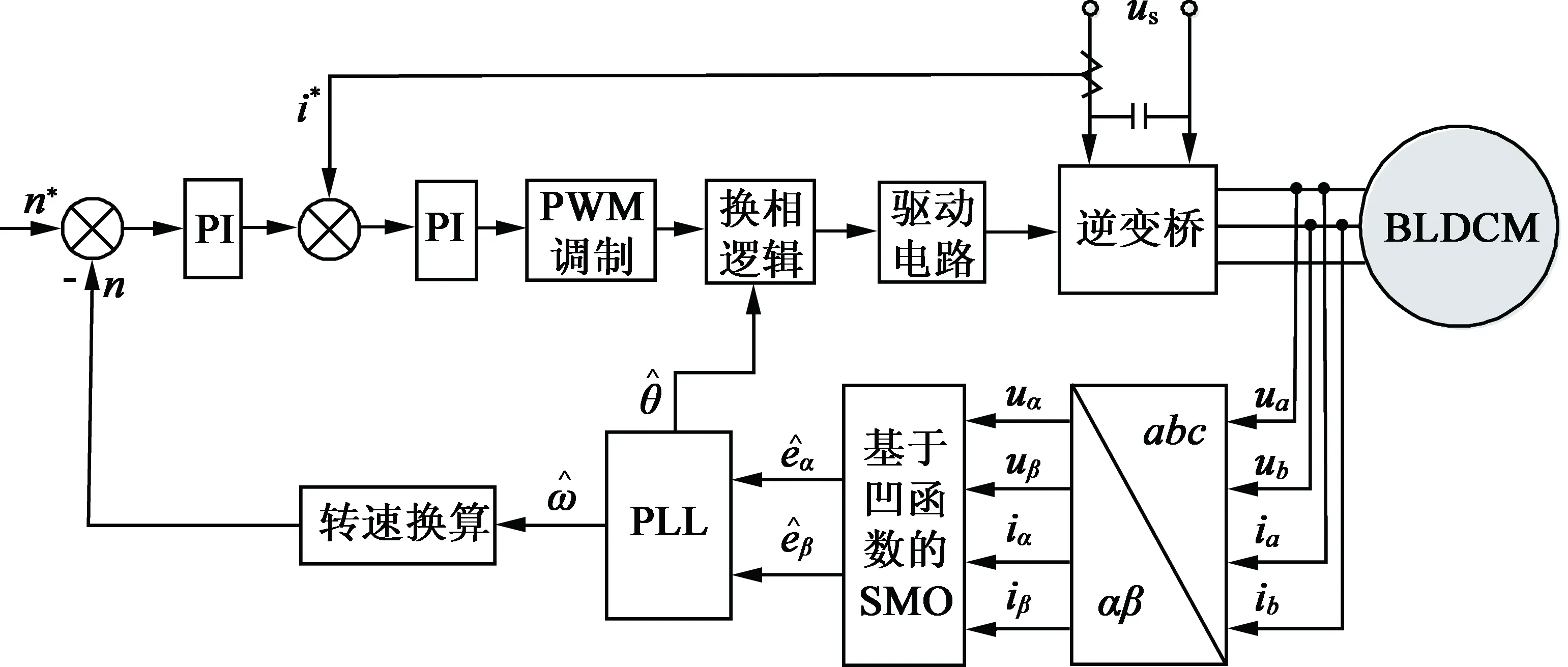
圖5 BLDCM無位置控制框圖
3 仿真分析
3.1 BLDCM無位置傳感器控制系統(tǒng)
基于以上分析,根據(jù)圖5在 MATLAB/Simulink搭建控制系統(tǒng),滑模觀測(cè)器的參數(shù)k1=-700000,k2=-600 000,g1=-0.330 545,g2=-0.090 01,電機(jī)的參數(shù)如表1所示。
表1 仿真電機(jī)參數(shù)
3.2 凹、凸控制函數(shù)的反電動(dòng)勢(shì)抖振對(duì)比分析
在反電動(dòng)勢(shì)抖振對(duì)比分析中,轉(zhuǎn)速環(huán)、電流環(huán)的PI調(diào)節(jié)器參數(shù)和滑模觀測(cè)器的k1,k2,g1,g1數(shù)值相同,只有控制函數(shù)不同。其中,凸控制函數(shù)選用正弦函數(shù),其數(shù)學(xué)表達(dá)式見式(21),它關(guān)于y=ax對(duì)稱的凹控制函數(shù)g4(x)如式(31)所示,結(jié)合sin(ax)的麥克勞林展開式,忽略高次項(xiàng),運(yùn)用MATLAB軟件,解出其數(shù)學(xué)表達(dá)式,其中a均取0.785,φ均取2。
圖6(a)為電機(jī)空載情況下,給定轉(zhuǎn)速4100r/min,采用凹、凸控制函數(shù)下的反電動(dòng)勢(shì)抖振波形。當(dāng)電機(jī)穩(wěn)定在額定轉(zhuǎn)速,在t=0.6 s時(shí)刻,突加0.38 N·m的額定負(fù)載,此時(shí)基于不同控制函數(shù)下的反電動(dòng)勢(shì)抖振波形如圖6(b)所示。對(duì)圖6分析可得,加載前后,采用凹、凸控制函數(shù),觀測(cè)的反電動(dòng)勢(shì)都是有抖振的,但是采用凹控制函數(shù)的反電動(dòng)勢(shì)抖振是明顯減小的,這也證明了前文分析的正確性。
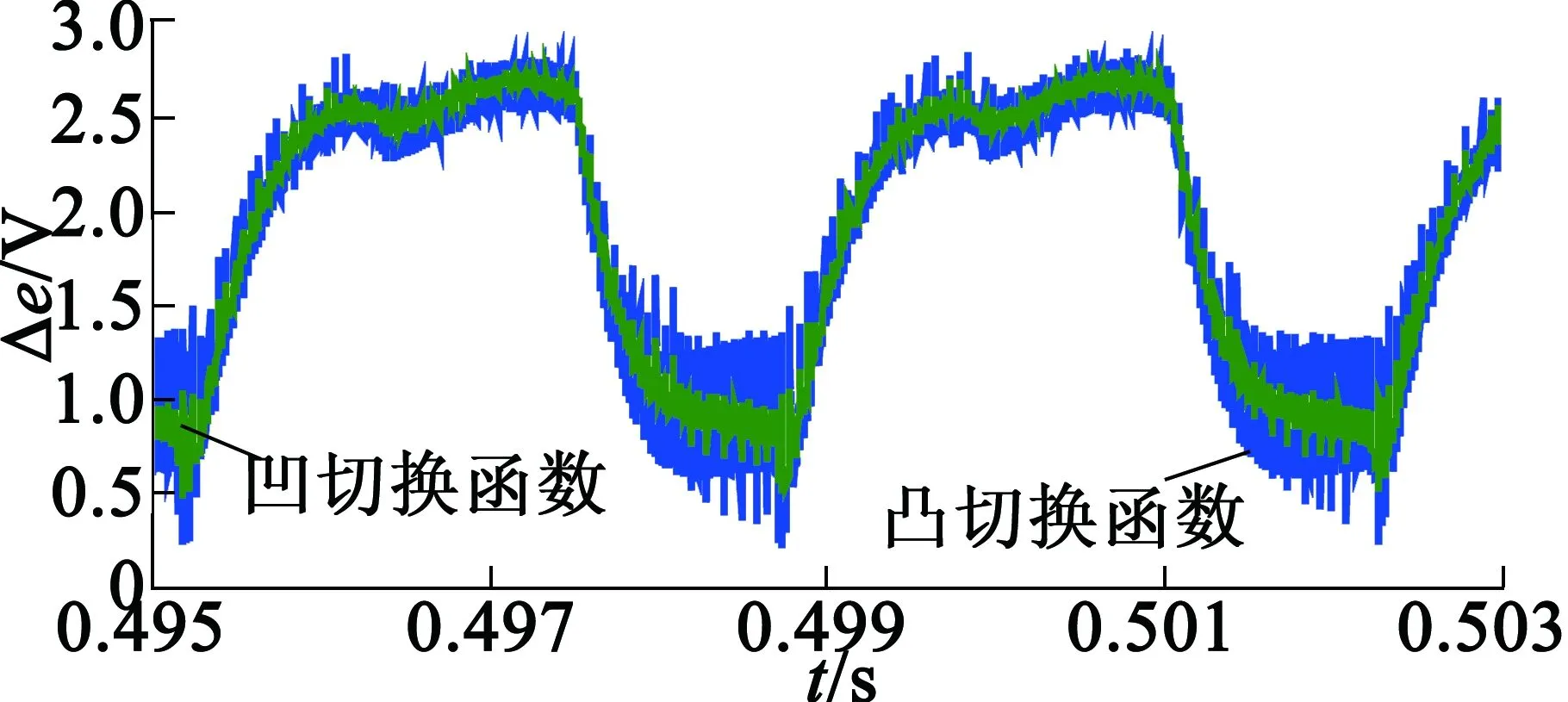
(a) 空載時(shí),凸、凹控制函數(shù)下的反電動(dòng)勢(shì)抖振
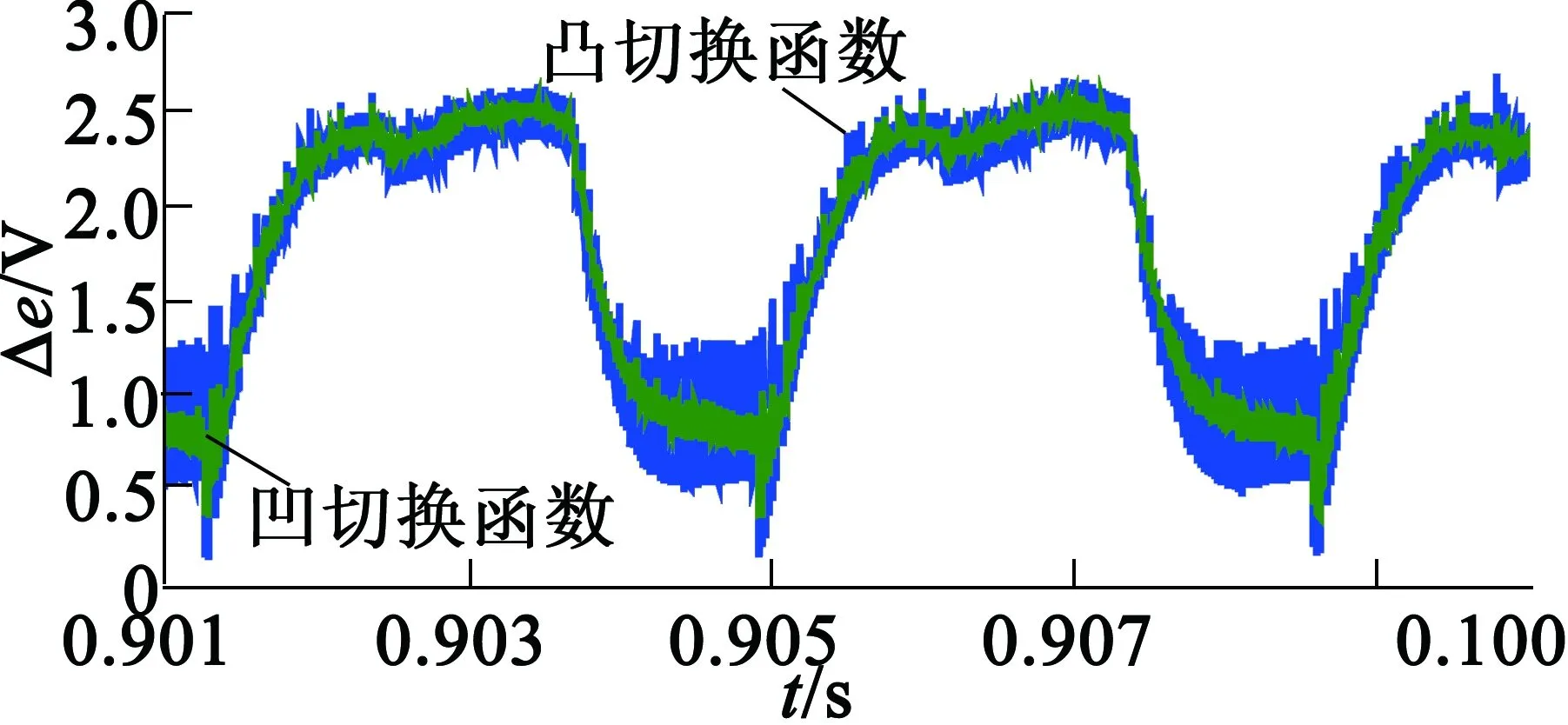
(b)加載時(shí),凸、凹控制函數(shù)下的反電動(dòng)勢(shì)抖振
3.3 基于凹控制函數(shù)的滑模觀測(cè)器的仿真結(jié)果
基于前面所述的凹控制函數(shù)建立BLDCM無位置傳感器控制系統(tǒng),電機(jī)在α,β軸下的反電動(dòng)勢(shì)、轉(zhuǎn)子位置角和轉(zhuǎn)速的波形如圖7~圖13所示,其中t=0.6 s時(shí)刻,突加0.38 N·m的額定負(fù)載。
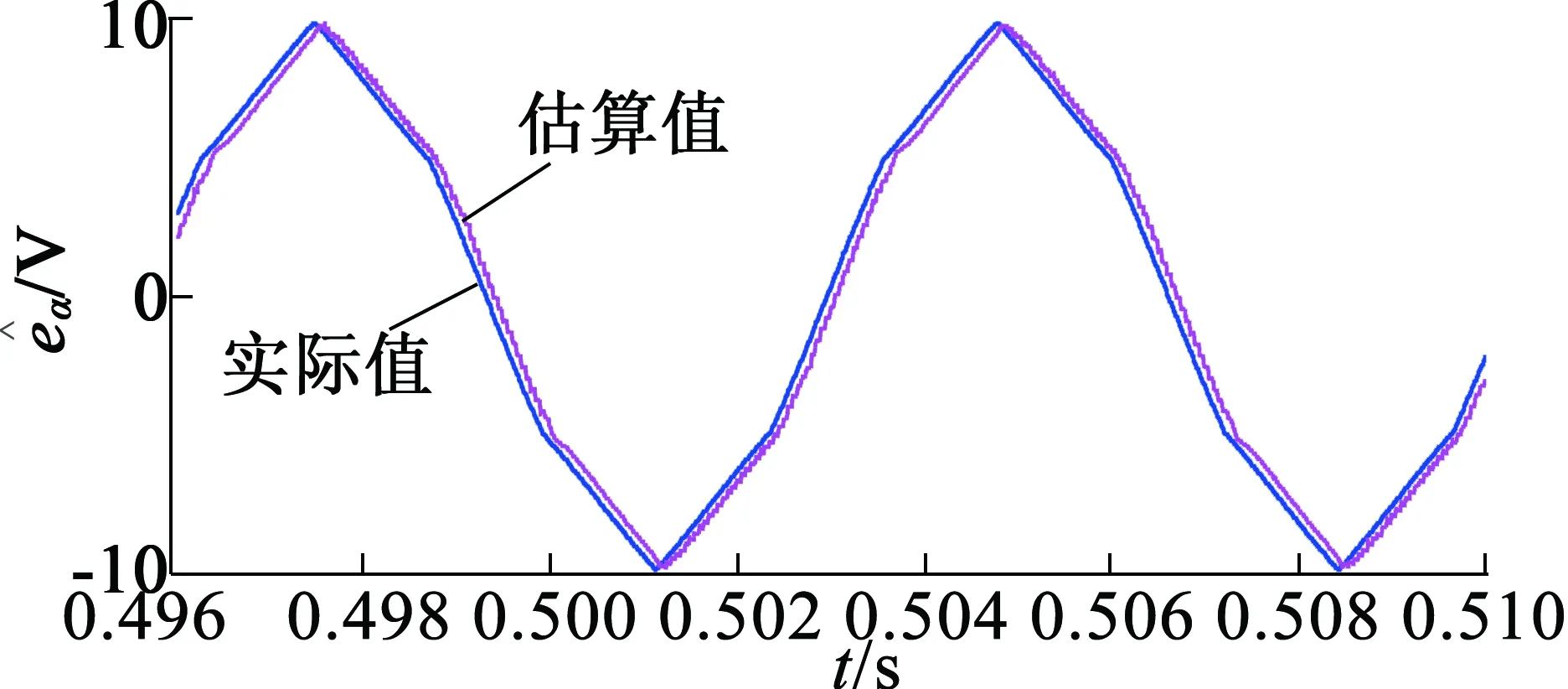
圖7 空載情況下,
波形
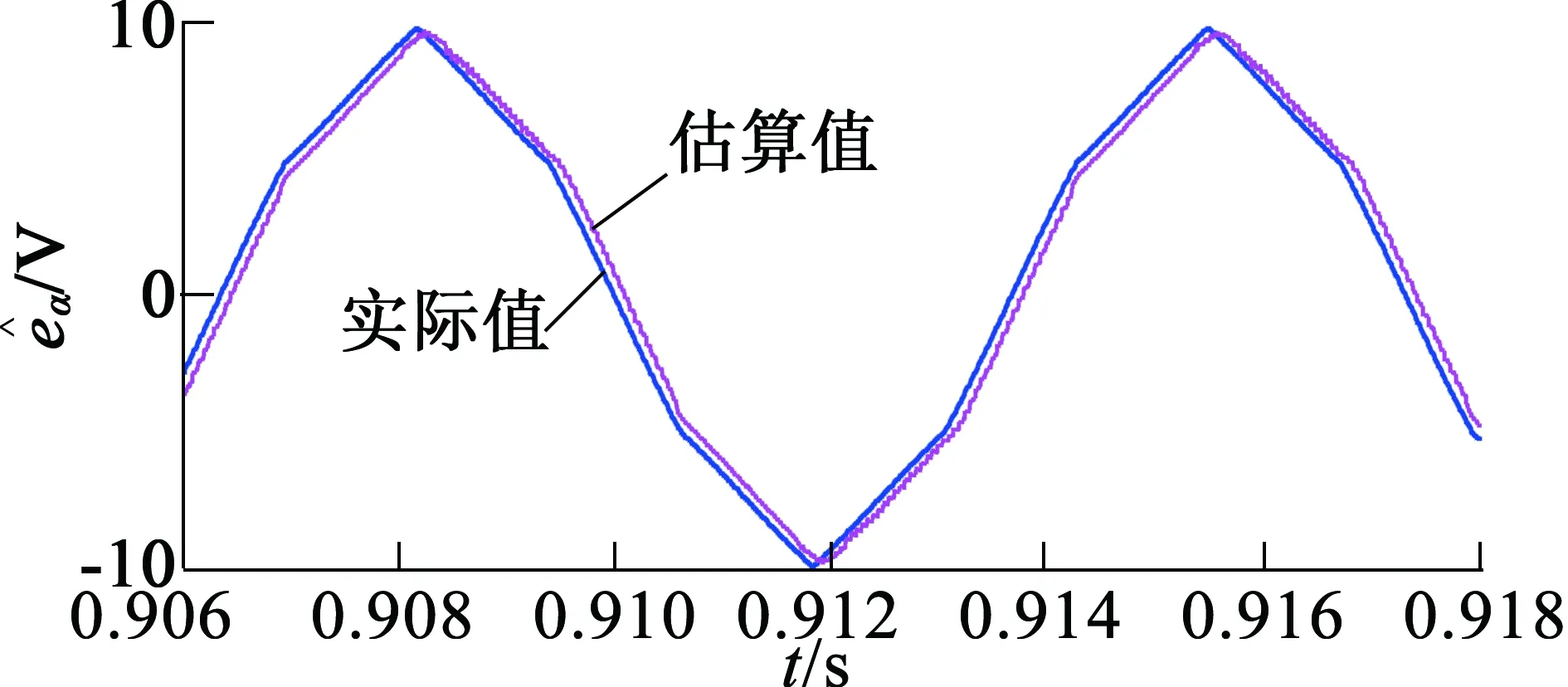
圖8 加載情況下,
波形
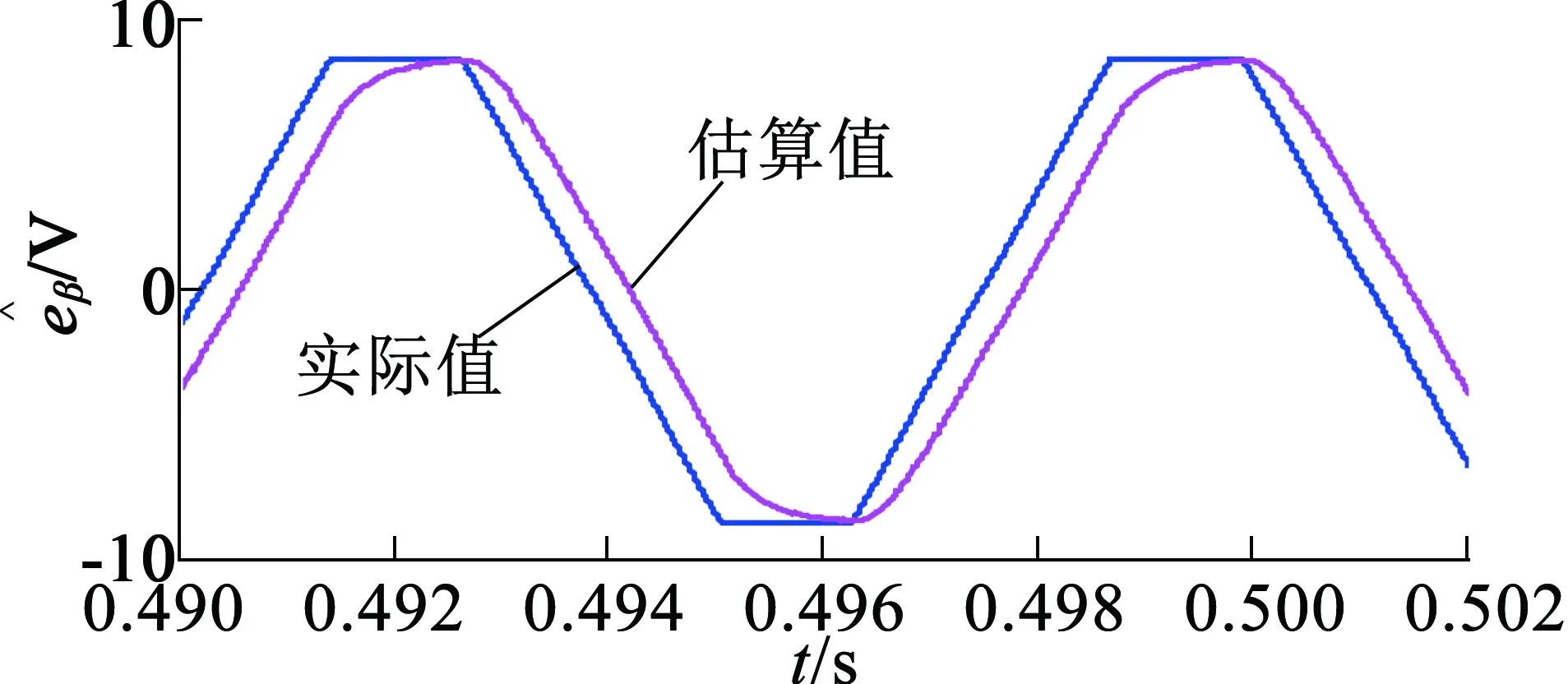
圖9 空載情況下,
波形
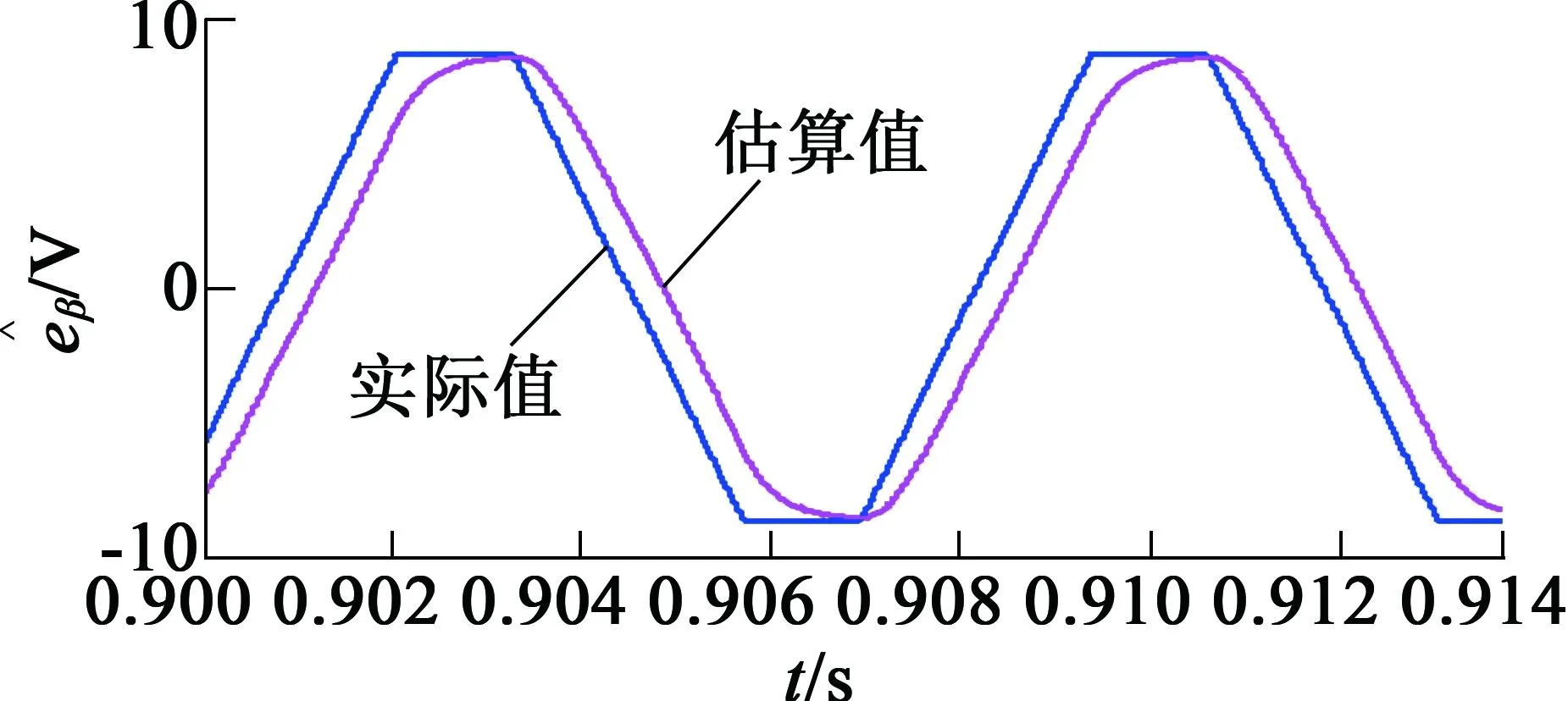
圖10 加載情況下,
波形
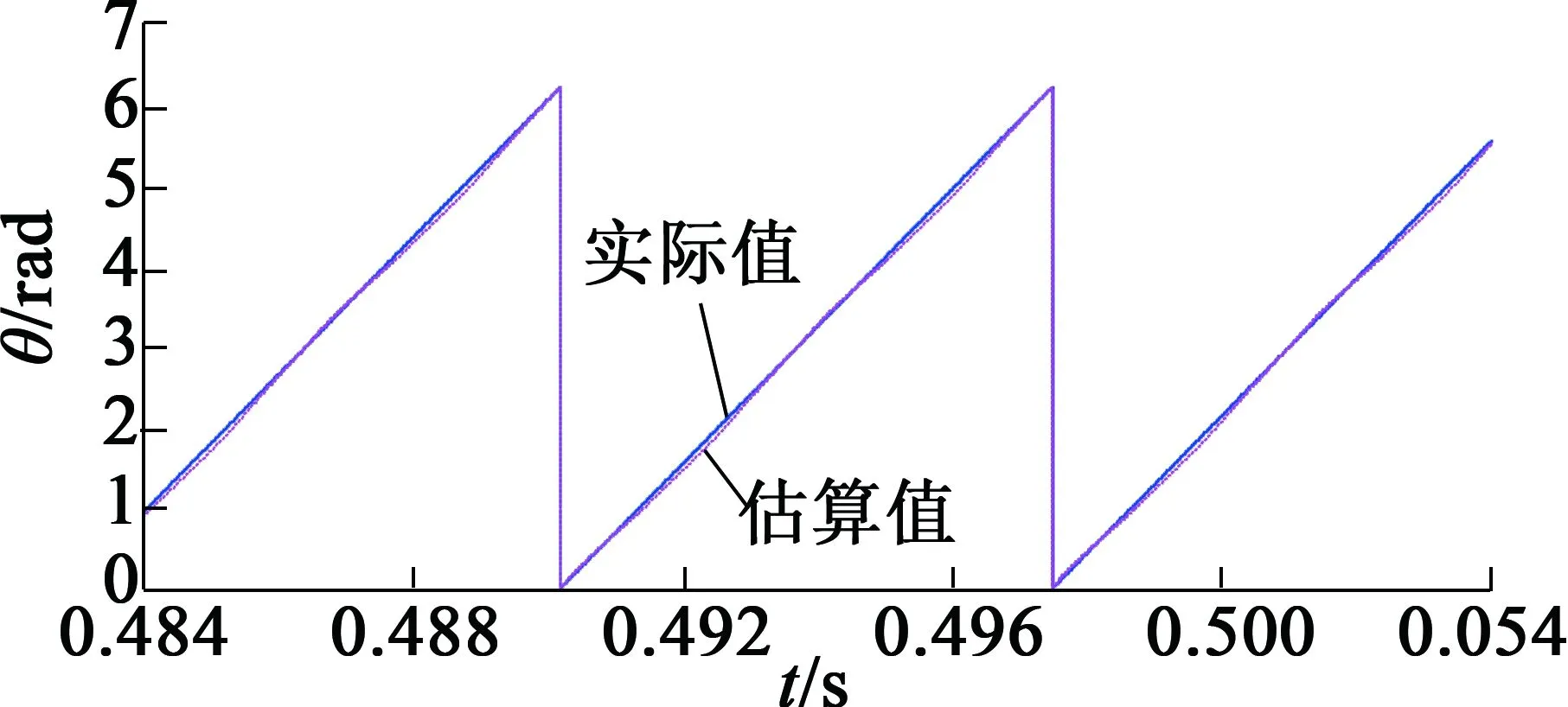
圖11 空載情況下,轉(zhuǎn)子位置角θ波形
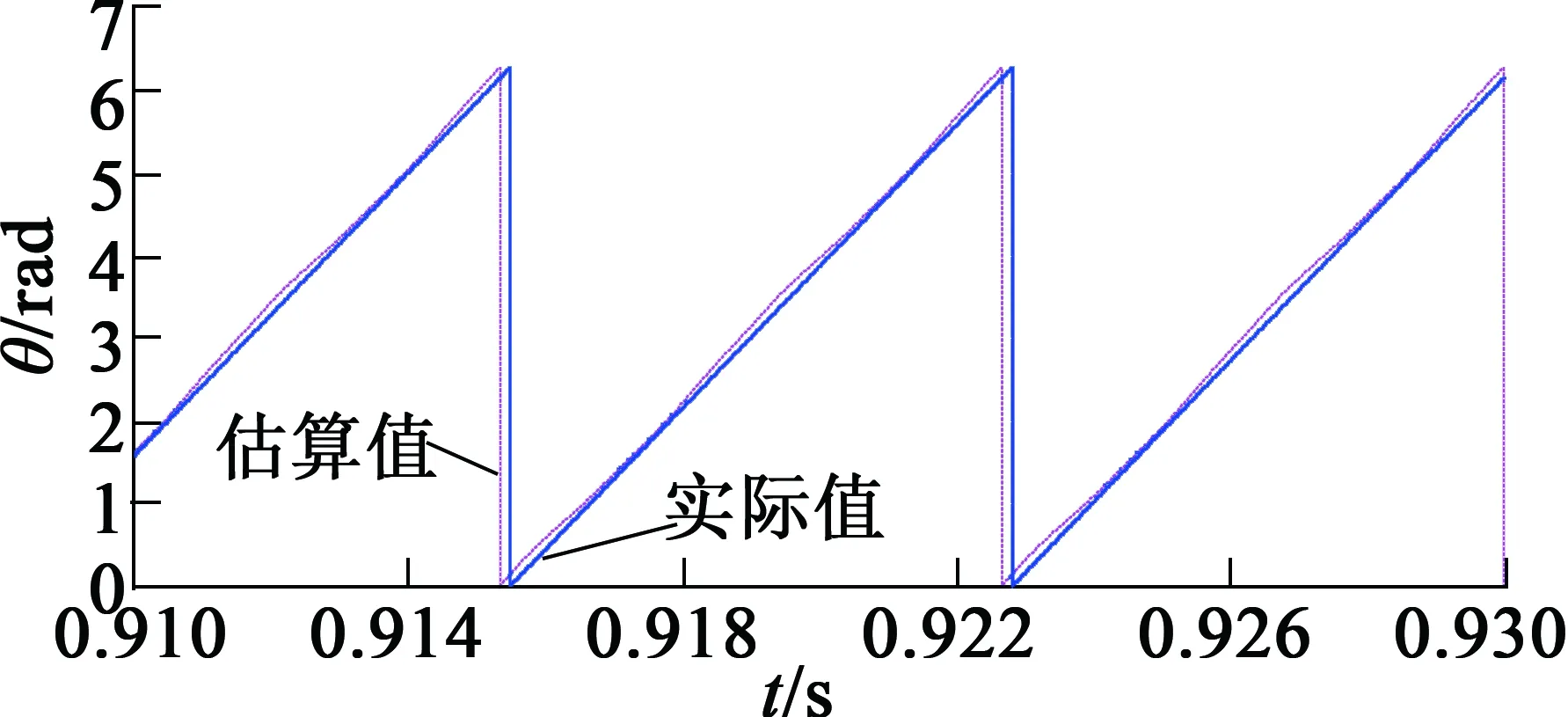
圖12 加載情況下,轉(zhuǎn)子位置角θ波形
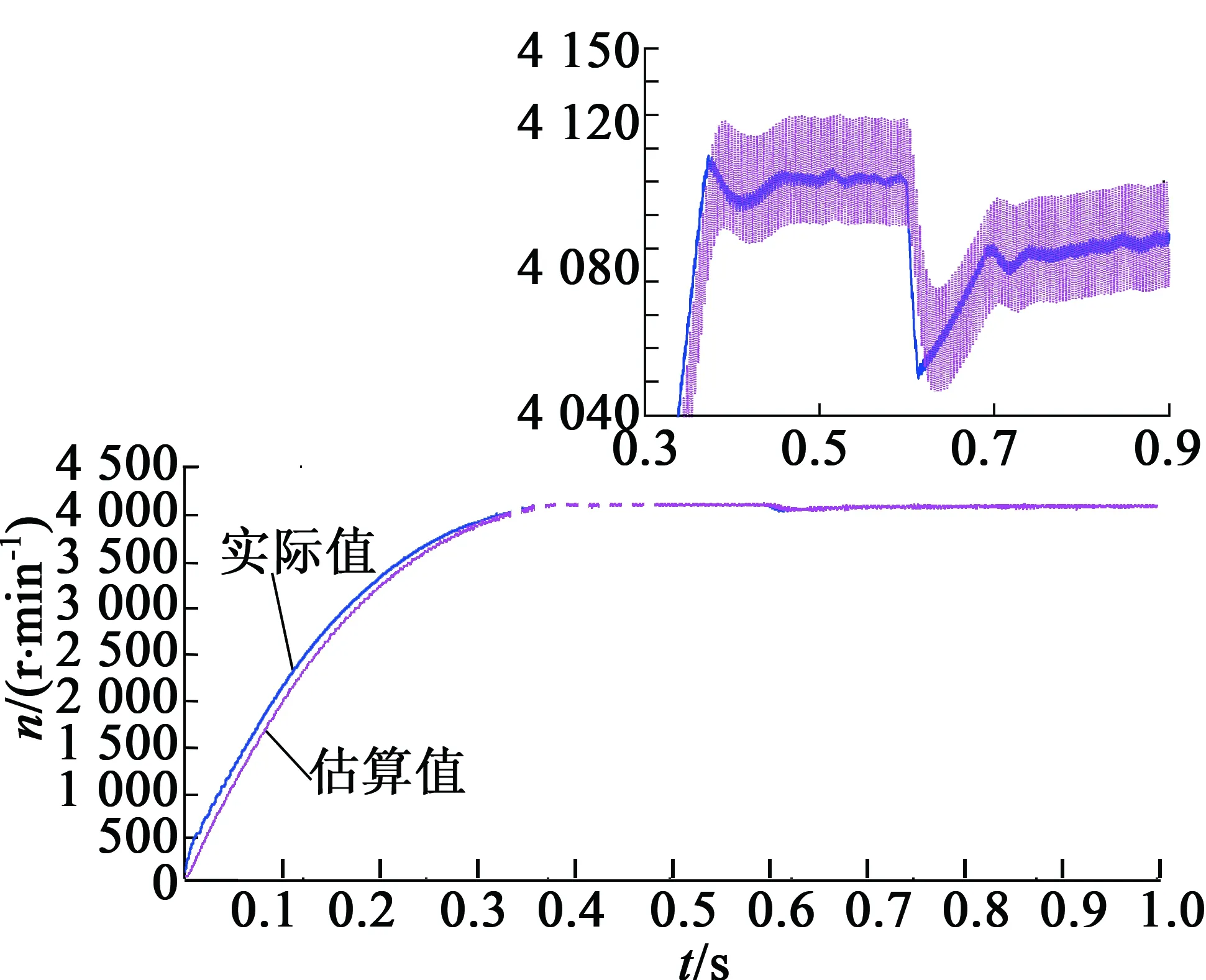
圖13 空載和加載情況下的轉(zhuǎn)速波形
對(duì)上面各圖分析可知,基于凹控制函數(shù)作為滑模觀測(cè)器中的控制函數(shù),不管是在空載還是在突加負(fù)載情況下,反電動(dòng)勢(shì)和轉(zhuǎn)子位置角估算值都是可以跟隨實(shí)際值的,反電動(dòng)勢(shì)沒有出現(xiàn)明顯的抖振,電機(jī)轉(zhuǎn)速也比較平穩(wěn),加載前后只有十幾轉(zhuǎn)速差,轉(zhuǎn)子位置角約有3°差值,沒有出現(xiàn)大的相移。本文的方法是正確有效的,能削弱反電動(dòng)勢(shì)抖振和提高轉(zhuǎn)子位置角精度。
4 結(jié) 語
本文從函數(shù)的凹凸性角度分析了已有的控制函數(shù),提出了一種凹控制函數(shù),并將其應(yīng)用到滑模觀測(cè)器中作為控制函數(shù),并理論證明了基于凹控制函數(shù)的滑模觀測(cè)器中的反電動(dòng)勢(shì)抖振明顯小于采用凸控制函數(shù)的,是可以削弱抖振的。仿真結(jié)果表明,在負(fù)載以及轉(zhuǎn)速突變的情況下,本文方法都能準(zhǔn)確得到平滑的反電動(dòng)勢(shì),及時(shí)跟蹤電機(jī)的轉(zhuǎn)速和轉(zhuǎn)角變化,具有較好的穩(wěn)態(tài)精度和良好的控制性能。
