基于電子格柵的無人機防沖突研究
2018-10-10 02:53:58楊秀玉朱代武向越新
安全與環境工程 2018年5期
楊秀玉,朱代武,向越新
(中國民用航空飛行學院,四川 廣漢 618307)
隨著無人機產業的不斷發展,無人機不斷被人們所接受,且使用者越來越多。我國自主研發的新型彩虹太陽能無人機已圓滿完成臨近空間飛行試驗,飛行高度達到20 000 m,共計飛行了15 h。由于很多小型無人機并非航空公司制造,或并非航空工程師設計,控制飛行的不是訓練有素的飛行員,提供服務的亦非訓練有素的技師[1],因此無人機沒有通常意義上的“感知與規避”能力,加之我國目前缺少相應的規章制度對無人機進行管理,因此導致2017年上半年國內接連發生了多起民用無人機闖入載人民航飛機航線或機場范圍的事件。例如:2017年3月13日,無人機導致朝陽機場短暫關閉;2017年4月20日,無人機導致南京機場短暫關閉,其后在接下來的4、5月份,西南地區3大機場昆明長水機場、成都雙流機場和重慶江北機場頻繁遭遇無人機干擾,導致航班大面積延誤[2]。因此,研究防止無人機發生沖突的方法具有重要意義。
目前國內外許多學者對無人機防沖突的方法進行了研究。如李洋[3]提出無人機多傳感器信息融合防撞方案,結合融合后精度較高的無人機高度和俯仰角數據,以近地高坡為例設計了無人機自主防撞軌跡,從而實現無人機自主防撞效能;李嘉等[4]設計了一種基于備選扇區思想的防撞算法,以實現無人機復雜環境下的自主飛行;韓統等[5]針對非合作型動態障礙對無人機自主防碰撞問題進行了研究,并基于最優化理論設計了無人機自主防碰撞規避策略。
上述研究都是在無人機的運行控制上設計算法以防止無人機發生沖突,而利用劃分無人機飛行范圍的方法來防止無人機發生沖突的研究還未見報道。為此,本文利用目前主流無人機的機載全球定位系統(Global Positioning System,GPS)設備進行定位來設立移動目標物電子格柵,即通過衛星定位無人機和移動目標物的位置,在無人機和移動目標物所在一定范圍的空域內設立虛擬屏障,限制無人機的飛行范圍,以防止無人機與移動目標物相撞。
1 電子格柵模型的建立
1. 1 移動目標物的分類
無人機在空中飛行時,除了可能與固定目標物發生沖突外,還可能與空中的移動目標物發生沖突。本文將移動目標物分為無人機和有人駕駛飛機兩種,移動物體指的是無人機與之可能在空中發生沖突的移動目標物的總稱。
為了確保安全、有序和充分地利用空域,滿足不同空域用戶的需求和空域資源的最優配置,我國《民用航空使用空域辦法》中對空域進行了分類,即航路、航線和民用機場區域設置高空管制區、中低空管制區、終端區(進近)管制區和機場塔臺管制地帶,通常情況下這4類空域被分別稱為A類、B類、C類和D類空域[6],其高度范圍為地球表面到6 000 m以上。
無人機飛行空域正由超低空、低空向中高空甚至臨近空間擴展,目前飛行高度為50~20 000 m,涵蓋了所有軍民航飛行空域[7]。因此,無人機在空中飛行時與飛行中的其他無人機和各類有人駕駛飛機都有發生沖突的可能性。
1. 2 無人機與移動目標物沖突情況的分類
依據移動目標物的分類可將無人機可能發生沖突的情況分為兩類:無人機與無人機的沖突、無人機與有人駕駛飛機的沖突。無人機與移動目標物發生沖突可能在同一高度層或不同高度層,其中在同一高度層發生沖突存在以下3種情況:
(1) 無人機與移動目標物對頭飛行發生沖突,本文以旋翼無人機A與旋翼無人機B發生沖突的情況為例(下同),作在同一高度層對頭飛行發生沖突的俯視圖,見圖1。
圖1 無人機A與無人機B在同一高度層對頭飛行發生沖突俯視圖Fig.1 Overview of the conflict between UAV A and UAV B flying opposite at the same altitude level
(2) 當無人機與移動目標物在同一高度層相向飛行,無人機位于移動目標物后且速度大于移動目標物時,其發生沖突的俯視圖見圖2。
圖2 無人機A與無人機B在同一高度層相向飛行發生沖突俯視圖Fig.2 Overview of the conflict between UAV A and UAV B flying in the same direction at the same altitude level
(3) 當無人機與移動目標物在同一高度層交叉飛行時,可能出現3種沖突情況:無人機與移動目標物飛行航路夾角小于90°;無人機與移動目標物飛行航路夾角等于90°;無人機與移動目標物飛行航路夾角大于90°。這3種沖突情況俯視圖見圖3。
圖3 無人機A與無人機B在同一高度層交叉飛行發生沖突俯視圖Fig.3 Overview of conflicts between UAV A and UAV B cross flying at the same altitude level
此外,無人機A與移動目標物在不同高度層飛行,當調整高度層時也存在發生沖突的可能性。由于旋翼無人機可以垂直上升,以無人機B由低層向高層爬升過程中與無人機A發生沖突為例,可能出現3種沖突情況,其俯視圖見圖4。
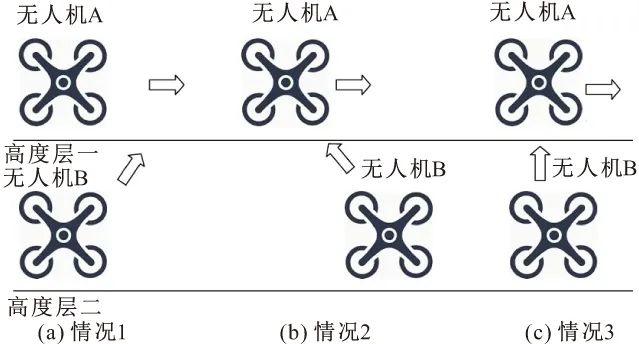
圖4 無人機A與無人機B在不同高度飛行發生沖突俯視圖Fig.4 Overview of conflicts between UAV A and UAV B at different altitudes
1. 3 移動物體電子格柵模型的建立
無人機可分為固定翼無人機、旋翼無人機等類型,其中民用無人機多以旋翼無人機為主;有人駕駛飛機分為螺旋槳飛機、固定翼飛機等類型,其中有人駕駛飛機多以固定翼飛機為主。本文只討論固定翼航空器電子格柵的建立,其他類型航空器電子格柵建立的方法與之類似。
1.3.1 移動物體初始電子格柵模型的建立
對于固定翼移動物體電子格柵的建立,地球直角坐標確定的移動物體幾何中心點的坐標為(Xa,Ya,Za)。在幾何中心的基礎上沿平行于機身軸線或機翼平均氣動弦線的方向(指向前或后)量取幾何中心點到機頭和機尾的長度,選取更長的距離,設為la(橢球的長半軸a);沿垂直于機身軸線的方向(指向右或左)量取幾何中心點到機翼翼梢的距離,選取更長的距離,設為lb(橢球的短半軸b);沿垂直于對稱平面的方向(指向上或下)量取幾何中心點到移動物體外表面的距離,選取更長的距離,設為lc。
建立的移動物體初始電子格柵模型為
(1)
移動物體的初始電子格柵模型圖見圖5,其中紅色小圓點為移動物體的幾何中心點。
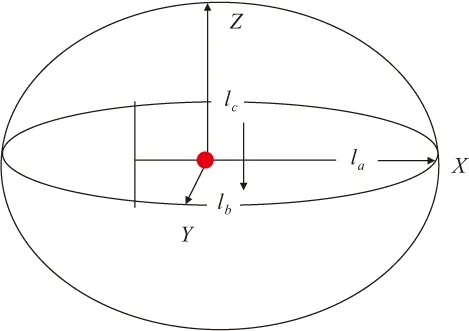
圖5 移動物體的初始電子格柵模型圖Fig.5 Initial electron grid model diagram of moving object
1.3.2 考慮安全閾值的移動物體電子格柵模型的建立
本文考慮的是無人機A與無人機B或有人駕駛飛機發生沖突,采取無人機A主動避讓的方式。為了保證無人機A與移動目標物的飛行安全,應在上述建立的移動物體初始電子格柵模型上增加一個安全閾值[8-9]。
移動物體初始電子格柵的安全閾值要考慮無人機A和移動目標物的飛行速度、無人機A操縱者反應時間和無人機A避開移動目標物的時間之和、無人機A所飛行的距離、GPS的定位精度。假設無人機A操縱者反應時間和無人機A避開移動目標物的時間之和為t、無人機A的飛行速度為v1、無人機B的飛行速度為v2、有人駕駛飛機的飛行速度為v3,基于GPS動態對動態定位誤差精度為l,則
無人機A的安全閾值為:S1=v1·t+l
(2)
無人機B的安全閾值為:S2=v2·t+l
(3)
有人駕駛飛機的安全閾值為:S3=v3·t+l
(4)
考慮了最低安全閾值后,建立的移動物體電子格柵模型為
(i=1,2,3)
(5)
移動物體的電子格柵模型圖見圖6,其中紅色小圓點為移動物體的幾何中心點。
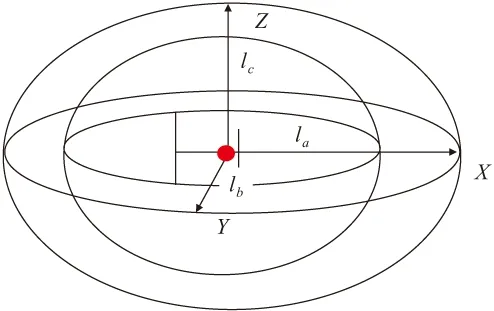
圖6 移動物體的電子格柵模型圖Fig.6 Electron grid model diagram of moving object
2 仿真模擬驗證
為了驗證建立的移動物體電子格柵模型防沖突的有效性,本文采用Matlab軟件對2架無人機發生沖突的避讓過程進行了仿真模擬。
模擬試驗采用大疆公司2架型號為大疆PHANTOM 4的無人機,分別作為模型中的無人機A和無人機B。大疆PHANTOM 4無人機為四軸飛行器,飛行載重1 380 g,垂直懸停精度為0.1 m(超聲波工作范圍內),水平懸停精度為0.3 m(視覺傳感器工作范圍內);無人機升降速度最大上升速度為6 m/s(運動模式),最大下降速度為4 m/s(運動模式),飛行速度為20 m/s(運動模式),飛行高度為6 000 m,飛行時間約為28 min,軸距為350 mm,螺旋槳為9450S快拆槳;無人機遙控器工作頻率為2.400~2.483 GHz,控制距離為5 000 m。因大疆PHANTOM 4無人機體積很小,設定無人機A、B初始電子格柵半徑為1 m。采用的模擬試驗方案為:無人機A與無人機B在同一高度從相距1 700 m的位置對頭飛行,發生飛行沖突;事先設定無人機A從右邊避讓,避讓時間為5 s,無人機操縱者反應時間為3 s,并根據劉立龍[10]的研究,GPS動態對動態相對定位誤差為厘米級,在此將GPS定位誤差設定為1 m,驗證2架無人機是否相撞。
根據前述無人機A防沖突電子格柵安全閾值的確定方法,可得到無人機A的安全閾值為S=v·t+l=20×(3+5)+1=161 (m)。
本文應用Matlab軟件仿真模擬無人機A與無人機B在上述情形下的飛行路徑,以驗證建立的移動物體電子格柵模型防沖突的有效性。仿真模擬得到的2駕無人機防沖突避讓過程路徑見圖7。
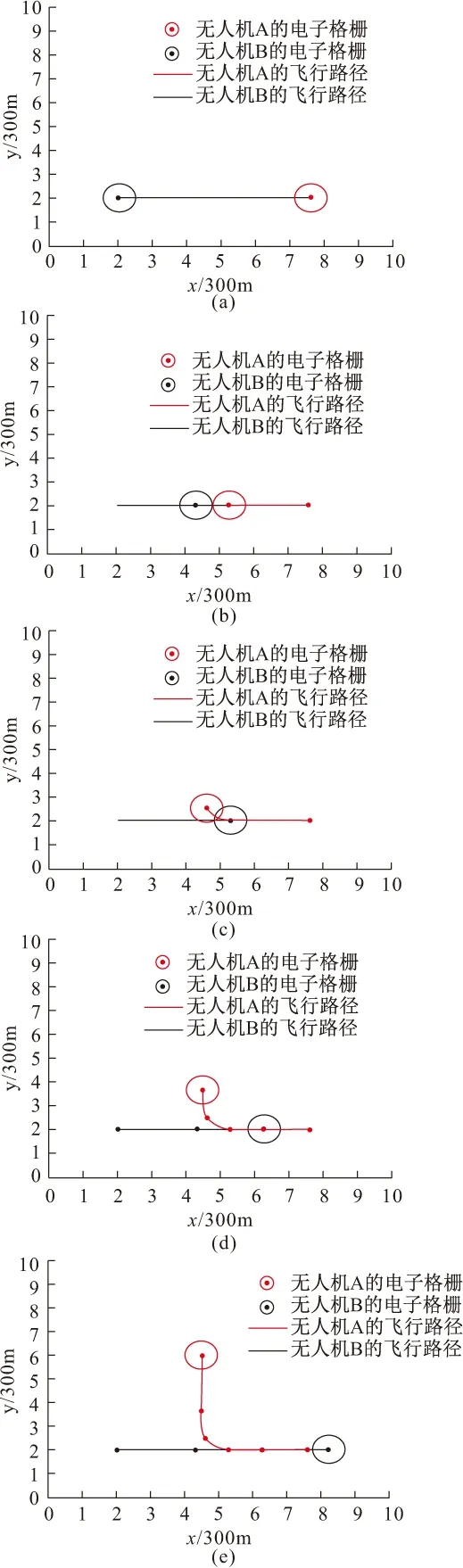
圖7 無人機A與無人機B防沖突避讓過程路徑示意圖Fig.7 Conflict avoidance diagram of UAV A and UAV B注: 紅、黑色小圓點表示無人機A、B的初始電子格柵; 紅、黑色圓圈表示無人機A、B完善后的電子格柵。
圖7中:無人機A與無人機B在相距1 700 m的位置開始相向飛行[見圖7(a)];無人機A與無人機B的兩個電子格柵相接觸[見圖7(b)];無人機A與無人機B相接觸時,無人機A立即向前以4 m/s2的減速度減速,向右以4 m/s2的加速度加速到20 m/s進行避讓,在避讓過程中它們的電子格柵相交,但無人機并沒有相撞[見圖7(c)];無人機A已成功避讓無人機B繼續向右飛行,無人機B保持原來的飛行路徑繼續前進[見圖7(d)];無人機A與無人機B保持上述飛行路徑繼續飛行一段[見圖7(e)]。可見,采取上述的防沖突電子格柵的建立方法可以有效避免無人機A與無人機B相撞。
3 結 語
無人機產業發展迅猛,人們對無人機的接受程度越來越高,但由于無人機操縱者沒有經過嚴格的培訓,加之我國尚未出臺針對無人機飛行的管理制度,目前無人機給人們的生活帶來了諸多風險。本文采用目前較成熟的GPS技術并結合民航多年的運行經驗,初步建立了一套無人機防沖突電子格柵,并通過仿真模擬驗證了其可有效避免無人機與移動目標物相撞,同時無人機也可獲得相對多的飛行空域。但本文只對無人機防沖突進行了研究,并未涉及無人機闖入電子格柵后應采取什么方法進行避讓,這方面還需要進一步的探索。一旦無人機沖突問題和避讓問題得到徹底解決,相信未來無人機將會給人們的生活帶來更多的便利。