現代海洋測繪及通信技術在港口航道疏浚工程測量中的應用
2018-10-15 07:57:06黎鈰圖
中國水運 2018年10期
黎鈰圖
(廣西新港灣工程有限公司,廣西 防城港市 538001)
1 航道疏浚工程概況
某北方城市港口航道疏浚工程長度達千米(從7+0~44+0),航道底部寬度:210m,選擇自航耙吸式挖泥船來疏浚,然而,此疏浚工程面積大、范圍廣、有大量船舶通行,且通行頻繁,這就為測量帶來困難。傳統的測量技術和設備無法達到理想的精細度,還會拖延時間。為了提高測量效率,就要采用新型現代海洋測繪與通訊技術。
2 海洋測繪及通訊技術設備類型及特點
2.1 LRK測量技術
本航道疏浚工程測量選擇了Sagitta射手接收機,此機器是為海上測繪與通訊量身設計打造的,主要依靠UHF電臺數據鏈,實際使用中體現出高度集成化、靈活性、良好選擇性、功能安全、穩定等優點,而且此數據鏈所覆蓋的作業范圍最大、距離最遠,最大的作業范圍達到40km, 而且能夠全面提升平面定位的準確度和精度,達到1ppm。
2.2 潮位遙報系統
對于此航道疏浚工程測量來說,主要選擇潮位遙報驗潮儀,燈塔自動遙報驗潮儀,具體型號分別為:SAC5-1,KCYL-A,而且平面定位設備則要負責測出潮水位置。
2.3 多波束系統
測量水深的儀器主要采用來自于美國的多波束系統,此系統得益于高端現代化技術、智能技術,具體的性能參數如表1所示:
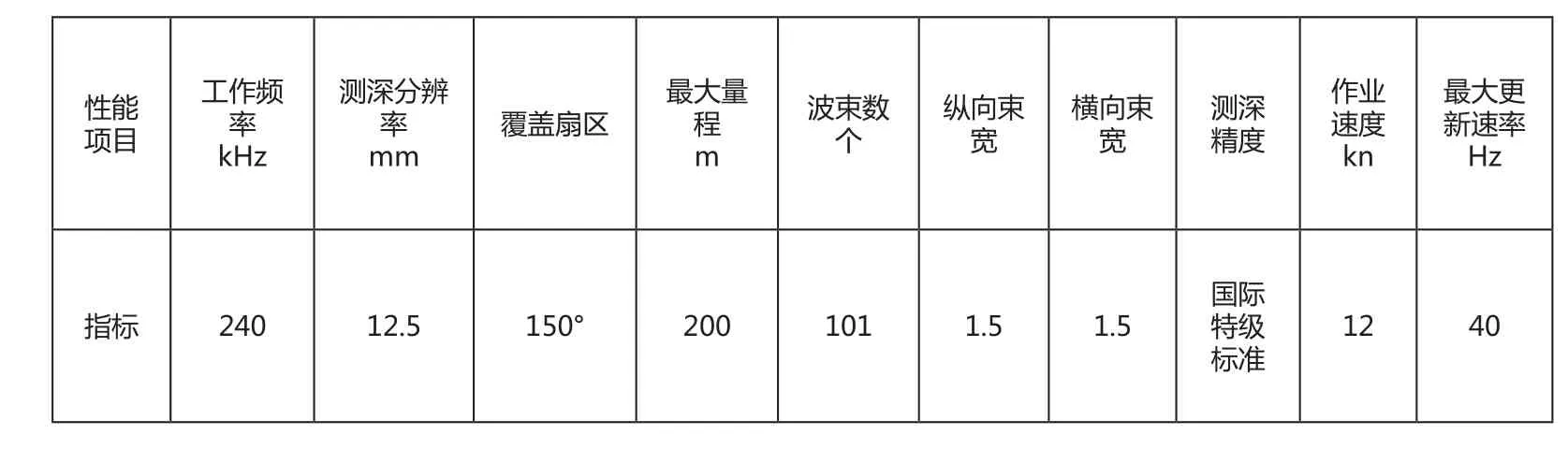
表1 水深測量儀參數
3 港口航道疏浚工程測量中現代測繪與通訊技術的運用
為了緩解此港口航道疏浚施工壓力,提高測繪、測量的效率和精度,就要采用現代測繪與通訊技術,對此決定選擇多波束技術、LRK技術、潮位遙測技術等,實際的使用情況如下:
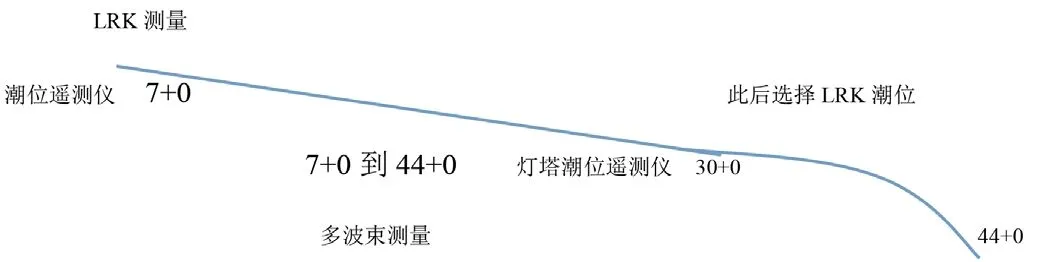
圖1 航道疏浚范圍與應用技術
3.1 LRK測量技術
此技術別名:遠距離雙頻實時動態載波相位差分技術,將GPS信息接收器分別配設于運動載體,同時,配設于地面的若干基準點,它們相互配合、協調作業能夠發揮動態定位功能,可以準確地測出運動載體的空間定位,也能準確地提供載體的運動軌道、工作軌跡。這一定位系統的定位有著動態定位的性質,參照各個時段定位的需要,靈活地進行定位服務。此動態定位系統又具體劃分為:實時差分動態定位、后處理差分動態定位。其中前者則須創建無線電DGPS數據傳輸系統,一邊觀測,一邊算出運行工具的定位。DGPS可以高效、遠距離地傳輸數據,實際的距離則受到多種因素影響,例如:設備數據鏈、基準臺數據鏈、運動載體電臺天線的裝配高度等。其中數據鏈電臺則選擇了超短波頻率,這一通訊設備一般局限于視距范圍,而且發射臺高度、接受臺的位置等也會影響視距,三者關系如下公式:

其中,D——視距,(km)h1——基準臺數據鏈電臺天線的配裝高度,h2——運動載體數據鏈電臺天線的配裝高度。
根據上面的公式,為了確保型號可以大范圍、遠距離傳遞,也就是在40km以外的距離傳遞,則要從基準臺、船臺兩大天線的高度加以把握,二者之和應該在94m以上,參照港口附近建筑物的實際情況,可以將VTS塔定位基準站,實際天線應該在88m以上。同時,以精準測量基準臺位置為目標,可以選擇RTKgps系統,憑借此系統來收集來自于控制點中GPS差分數據,對應準確地測量出基準臺的實際位置,并借助7參數進行轉換,則能獲得此點的坐標。
以上測量定位主要采用了LRK技術,一方面能夠全面提升測量精準度,另一方面也達到了動態的適時測量。基于以上特殊的功能,則適合用在距離驗潮站較遠的區域的測量。
3.2 基準臺站的自動化遙控裝置
此航道疏浚工程,主要通過GPS差分基準臺來對船舶加以遙測,通常測量操作應該在白天,這就需要晚上將電源關閉,這樣不僅節省能源,也能減少設備的損耗。因為LRKGPS基準臺站配設于VTS塔,這樣就難以人為地控制電源,對此引進自動化開關遙控設備,這一自動開關設備主要以GSM信號形式來傳遞信息,并借助移動通訊設備接受信息的方式來達到對電源的控制。
3.3 深度基準面的傳輸
傳統的測水深設備具有局限性,只能測出水體瞬間深度,然而,海洋表層不會永遠平靜,必然受到風浪、潮汐等的影響,要想獲得平穩狀態下的海底地形水深值,則可以將各個瞬間測深值進行集中統計,而且要化歸至平穩的深度基準面,具體依照下列公式: L(x,y)=MSL(x,y)-l(x,y)
L(x,y)——x,y位置的深度基準面高程,MSL(x,y)——平均海面,l(x,y)——平均海面和深度基準面二者之差。
從上面的關系式能夠算出平均海面,具體方法包括:回歸分析法、同步改正法等,對于此航道疏浚施工來說,可以選擇同步改正法來傳輸深度基準面,具體原理為:將測量船當做驗潮站,并對應標識相關的關鍵點坐標與數值。
3.4 潮位遙報系統
這一航道疏浚工程的最遠處和陸地之間相距37km,港口內外的水位差別,主要影響因素就是潮汐差、潮汐時間等,也就是航道不同位置所測得的潮位值也不同,需要區別對待。根據試驗實踐得出:相同區域,各個潮汐時段的測量結果之間的差距達到半米。為了確保測量準確度,就要選擇科學的潮汐誤差控制法。對此,已經潮位遙報系統,同步配合于LRK-DGPS系統來測出潮位。
(1)浮子式自動驗潮儀的使用。此驗潮儀器在水位測試、測量中有著較高的精準度,達到1厘米。而且能夠將一切測得數據憑借VHF來輸送至數據處理中心,數據傳輸之間相隔5分鐘,數據中心安裝了數據接收設備,能夠獲取潮位信息,并途徑相關串口來同計算機系統相連,對應輸出數據。
(2)壓力感應式自動驗潮儀的使用。其潮位測量精準度也很高,達到1cm。
(3)LRK-DGPS測量系統的使用。主要應用范圍:30+0海里處的潮位,其測量精準度較高達到1ppm.但是其驗潮位的精準度卻相對欠缺,難以達到潮汐的準確測量。
3.5 多波束測量
(1)科學裝配換能器。實際安裝中要重點把握以下關鍵因素:安裝是否穩定,必須確保換能器達到理想的校準狀態,確保運行安全。在確保測量船航行、停岸時處于高度安全狀態,不會對其他設備、裝置帶來影響,為了達到這一目標可以將各項測量成功進行后,提高換能器,達到水面上方,船舶范圍內,是否方便拖放。要將換能器定位在易于拖放的位置。
(2)多波束的審核校對。必須切實根據相關規范來進行多波束的審核、校對,可以參照系統所供應的校準參數,把此參數利用數據處理軟件來加以傳輸處理。
(3)數據的采集與處理。準確測出聲速,而且將數據傳輸到測量軟件,在此基礎上來采集相關信息、數據,可以根據預先已經設計成功的測量線來加以測量,為了對航道進行全方位的測量,可以設置若干測量線,達到全范圍測量的目標。
因為多波束測量需要大量的數據、信息,這其中容易受到一些內外因素干擾。對此可以嘗試將數據處理計算機配設于測量船,而且要利用以太網來聯系數據采集與處理系統,這樣就能達到數據、信息的交流、分享,從而提高數據采集與處理效率,提高測量數據的準確度。
測量數據的處理主要通過1x1m的方式展開,再將測量數據通過2x2m的水深網格來供應,這樣就能徹底達到航船的需要。實踐證實,此數據處理方法能夠有效確保施工作業效率,而且測量成功后能及時地供應測量數據。
4 測量效果分析
經過多種現代化測繪技術的運用,特別是多波束測量技術,其所獲得的數據覆蓋面廣、范圍更大,而且測量精度更高,10km的航道,其測量數據經壓縮,形成一個壓縮包方便傳輸,提高了測繪工作效率。
港口航道疏浚工程測量中,多種現代測繪技術的協調利用能夠確保測量的精度和準確度,而且提高了測量工作效率,特別是數據信息的自動化傳輸,確保了測量準確度,然而,個別現代測繪技術實際使用中依然有待于發展與完善,需要不斷地深入研究,提高其使用效率。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
