智能包裝機構關鍵部件設計與分析
2018-10-17 06:01:12生國鋒
裝備制造技術 2018年8期
生國鋒,楊 龍,徐 惠
(棗莊科技職業(yè)學院,山東 棗莊 277000)
0 引言
隨著社會的發(fā)展、物流企業(yè)的增多以及工業(yè)化水平的進步,刺激并促進了包裝生產(chǎn)的發(fā)展[1,2]。以網(wǎng)絡購物為例,僅2016年的雙十一當天,各大電商的銷售額總和就超過1770億元,同比增長44%,進而給包裝行業(yè)帶來巨大的壓力,人工對商品貨物的包裝需要耗費大量的成本,而且包裝質量受限于工作人員的熟練程度,甚至會給商品的包裝帶來一定的損壞,效率較低,難以滿足當前的需求[3,4]。
針對以上問題,本文提出一種智能商品包裝機構的設計,該機械結構簡單可靠,能夠完全代替人力操作,具有良好的社會效益和經(jīng)濟效益。
1 包裝機構總體設計方案
1.1 包裝機構類型
在機械工程領域內,包裝機構具有多種分類方案。按照包裝機構的機械自動化程度,可將包裝機構分為全自動和半自動兩種。全自動包裝機械主要用于自動供貨系統(tǒng),能夠完全脫離人工干預完成貨物或商品的包裝任務[5]。半自動包裝機構需要一定數(shù)量的工人進行填料,設備自動化程度有限。根據(jù)被包裝產(chǎn)品的類型不同,可將包裝機構分為專用、多用以及通用包裝機構,分別應用于單一、多樣以及某個范圍內產(chǎn)品的包裝。
本文所設計與研究的包裝機構為全自動通用包裝機構,能夠有效地完成商品的掃描、填充、貼單、包裝等任務,可顯著地解決當前電商發(fā)展帶來的包裝能力不足問題。
1.2 主功能實現(xiàn)方案
在功能實現(xiàn)方面,該智能包裝機構實現(xiàn)包裝任務需要多個機械部件與電子器件的協(xié)同工作[6],實現(xiàn)智能包裝功能主要依賴于測量光幕、MCU、直流推桿電機、機械手臂、光電傳感器、滾筒、液晶顯示屏、觸摸感應器、普通式履帶、L298N驅動等部件。包裝機的整體機械結構如圖1所示,主要包括升降機構、傳動機構、封箱機構和裁剪機構等,可在較短的時間內完成不同大小尺寸商品的包裝。在傳感器的監(jiān)測作用以及傳動機構的工作條件下,包裝機構能夠迅速實現(xiàn)商品的掃描、測量、包裝,并在最終環(huán)節(jié)完成商品或貨物物流單號的打印、粘貼,大大縮短了整個物流運輸?shù)臅r間。
在控制方面,主控器采用STM32RCT6單片機,其驅動電路如圖2所示。該類型單片機的主頻為108 MHz,具有單周期乘法器和硬件除法器,NVIC支持16個外部中斷,且每個中斷有16級優(yōu)先級。
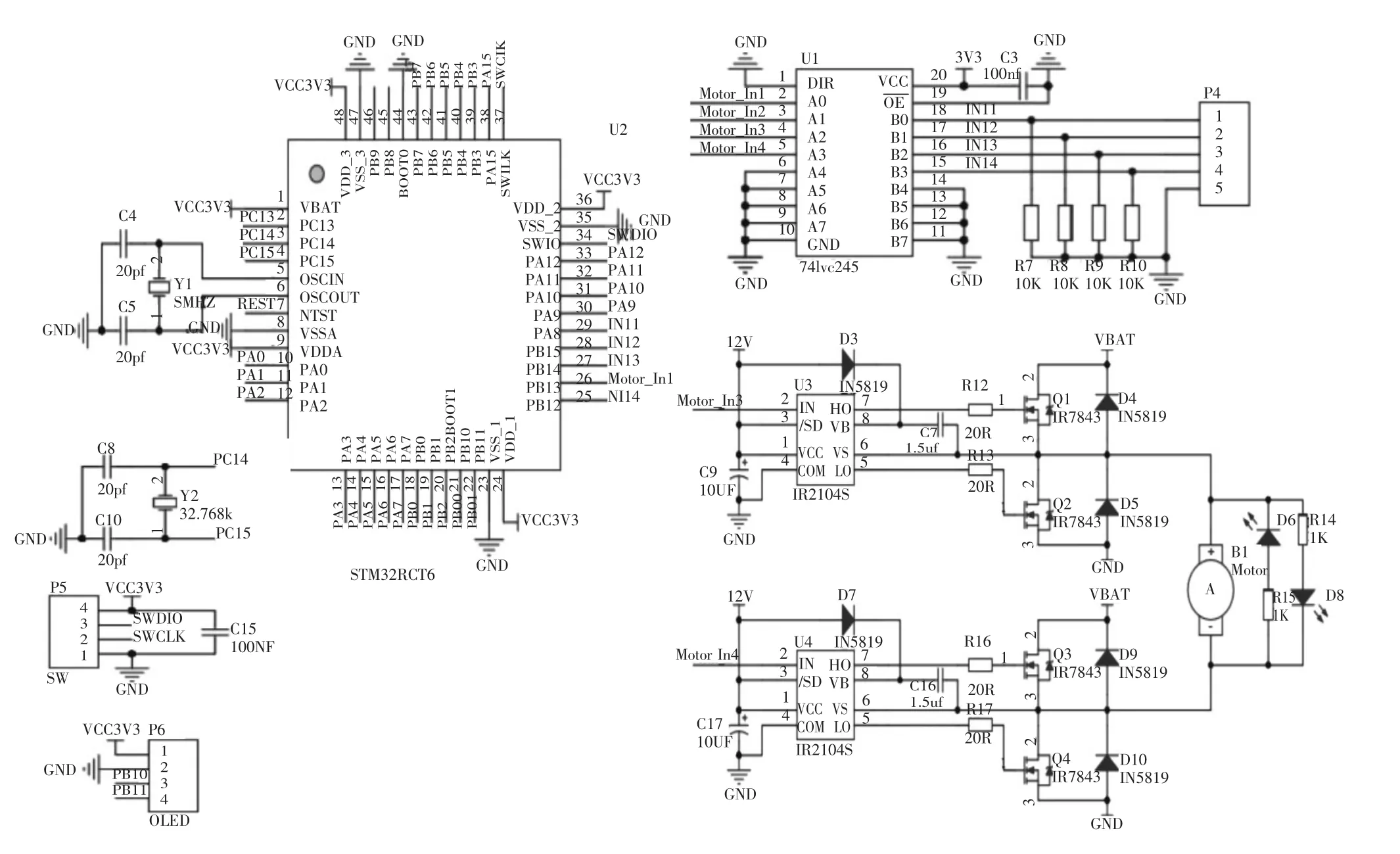
圖2 主控器驅動電路
根據(jù)該包裝機構的工作原理和流程可知,其可操作性強,能夠適應的被包裝商品的重量和大小,比如鞋子、皮包、電腦等。包裝的主功能實現(xiàn)流程如圖3所示,其具體工作過程為:(1)當包裝機開啟運行時,包裝材料供送裝置將帶動包裝材料向指定的方向勻速前進。(2)箱體到達膠帶粘貼機構后,經(jīng)過膠帶剪切器剪切,四邊進行封口,并將物料填充至包裝材料內。(3)包裝材料在機械手裝置的作用下繼續(xù)向下運動,到達膠帶裁剪位置時,步進電機啟動,由封箱機構完成包裝袋頂封,并經(jīng)膠帶裁剪機構切斷,至此完成一個工作循環(huán),從而進入下一個階段工作流程。
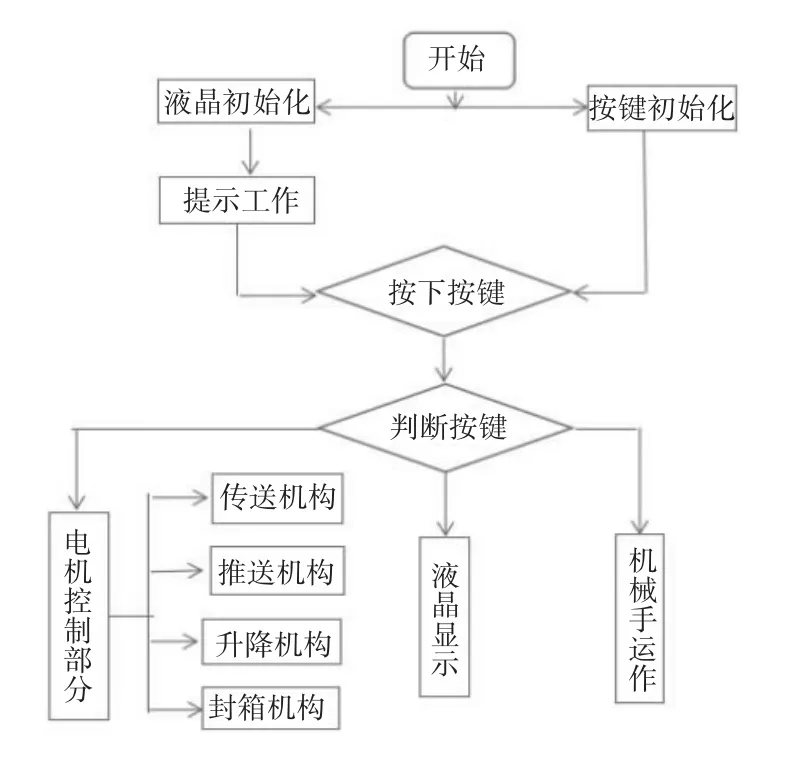
圖3 主功能實現(xiàn)流程
1.3 封口形式及封箱機構的設計
封口形式采用的方案為簡單的膠帶切割,在實際的應用中也起到了良好的作用效果。圖4表示膠帶裁剪機構,膠帶裁剪機構的總體構造較為簡單,零件的可加工性較為理想,MCU收到反饋信號后,控制步進電機的轉動,從而可以很好達到裁剪長度的控制,來回的滑塊可以很好的使箱體的側面封裝達到一個很好的封裝效果。封裝機構如圖5所示,可配合機械夾持機構提高封裝的質量。
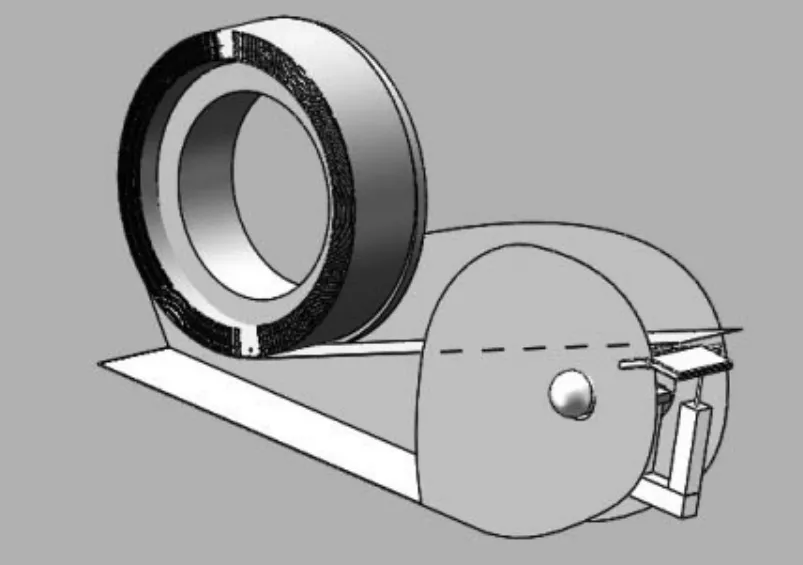
圖4 膠帶裁剪結構
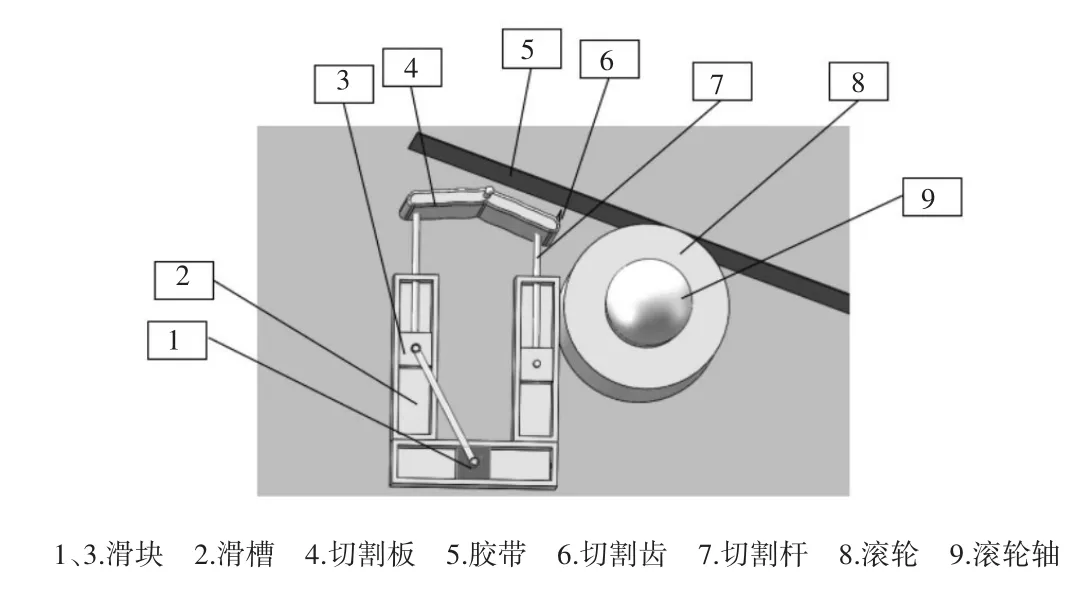
圖5 封裝機構結構圖
2 關鍵部件有限元分析
2.1 仿真分析方案
為了校驗結構設計的安全性和可靠性[7],本文采用有限元分析方法對包裝機構的關鍵承載部件進行有限元分析,選用的軟件為ANSYS,分析類型為靜態(tài)結構分析。有限元分析的步驟主要包括前處理與后處理兩部分。本文采用自由網(wǎng)格劃分方法,通過refine控制各個元件的網(wǎng)格畸變率,均滿足計算精度。
2.2 膠帶裁剪機構靜態(tài)結構分析
膠帶裁剪機構的靜態(tài)結果分析結果如圖6所示,可以看出,在特定載荷下,應力分布狀態(tài)與載荷一致,該結構表現(xiàn)出一定的應力集中現(xiàn)象,最大應力為153.84 MPa,低于材料的屈服強度。在工程實踐中,裁剪機構的刀齒需要充分滿足強度和韌性,因此一般采用調質鋼作為基礎材料。其它部分的材質可采用鑄鐵,能夠確保良好的減震性能。兩種不同材料之間的結合可采用焊接連接,也可設計特定螺栓連接結構。
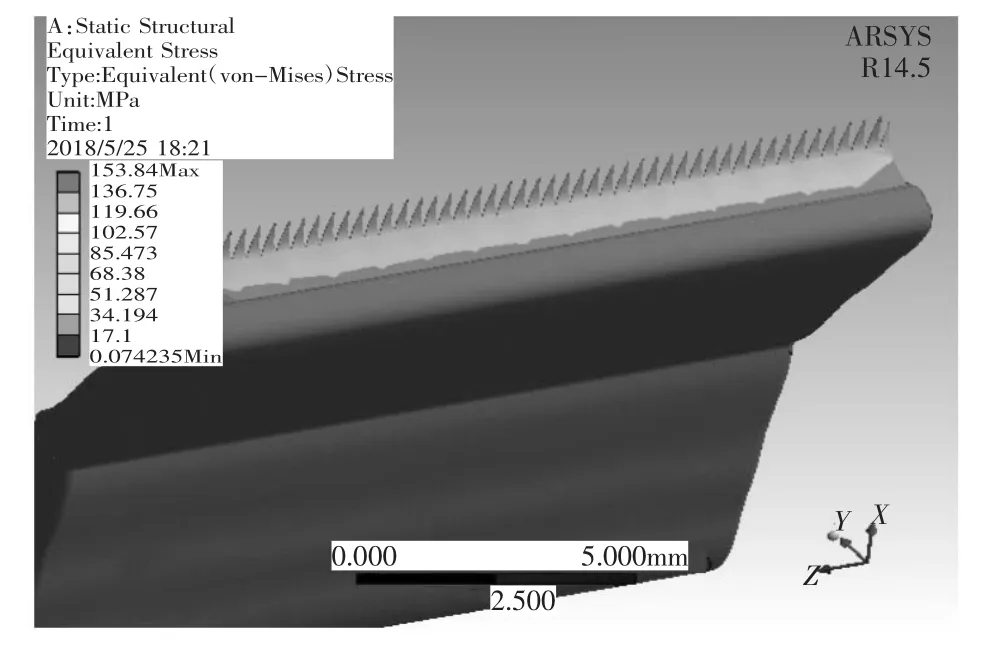
圖6 膠帶裁剪機構應力云圖
2.3 載物板升降孔靜態(tài)結構分析
升降機構載物板也是包裝機構重要的承載部件(結構如圖1中的元件9所示),其升降孔內部的應力云圖如圖7所示,從圖中可以看出,在貨物重力作用下,應力呈環(huán)狀分布,最大應力為20 MPa,位于導槽位置。升降機構載物板在工作中主要起到傳遞商品和包裝箱的作用,在整個過程中是必不可少的,同時也是三層循環(huán)原理的重要來源。
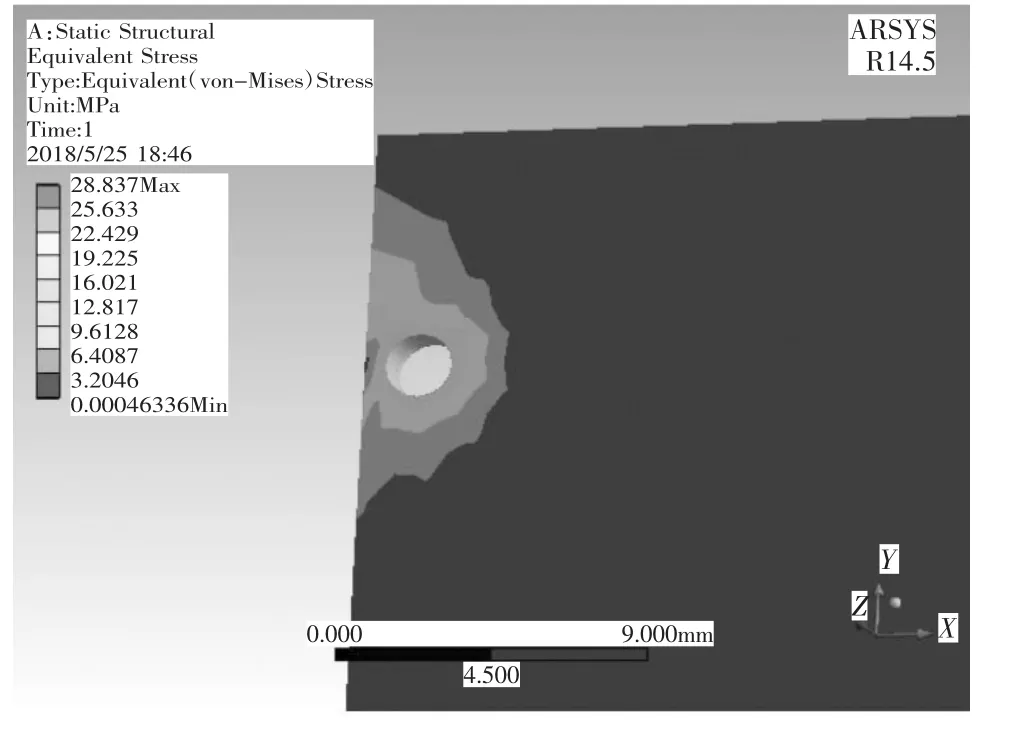
圖7 升降機構載物板應力云圖
3 運行及控制方案
3.1 控制方案設計
針對包裝機構的多個工作流程,采用分級控制方案,在智能控制系統(tǒng)中的基本要求有:(1)對于工作環(huán)境和條件有著較強的適應性,能夠快速、準確地與上位機實現(xiàn)數(shù)據(jù)通訊,執(zhí)行機構響應效率高[8];(2)電子器件穩(wěn)定性高,能夠在高干擾和惡劣環(huán)境下正常運行;(3)低功耗,性價比高,易于控制。
3.2 硬件設計
在硬件設計方面,本文采用功能模塊化的方法對各個功能進行設計。因此,將硬件模塊分為料裝和封裝模塊、稱重模塊、數(shù)據(jù)傳輸模塊、機構執(zhí)行模塊等。在分級控制條件下,各個模塊之間具有優(yōu)先級限定,可有效實現(xiàn)集中性控制和發(fā)散性控制的結合。
料裝和封裝模塊采用了GK35-2C型封口控制器,該控制器能夠包裝厚度和料裝頻率控制封裝的范圍和軌跡。稱重傳感器選用德國HBM數(shù)字式稱重傳感器,具有接線簡單、易于數(shù)字化通訊、自診斷等優(yōu)點,極限負載高達3 t,靈敏度在0.1 g.在數(shù)據(jù)傳輸方面,系統(tǒng)可實現(xiàn)無線遠程信號輸送,基于無線網(wǎng)卡發(fā)送指令信號。對于傳感器的信號采集,系統(tǒng)選擇ADAM-5017系列采集卡實現(xiàn)較高精度信號的獲取,能夠完成八通道的程序設定。驅動模塊選用無刷直流伺服電機,易于變成控制。備用供電端為鋰離子蓄電池組,具備自身監(jiān)測和預警能力。
4 結束語
目前,國內包裝機構行業(yè)處于快速發(fā)展階段,但是諸多設計對于智能化水平的提升不夠重視,使得產(chǎn)品使用壽命短,耗費較多人力。本文所設計的智能包裝結構能夠實現(xiàn)全自動通用包裝,根據(jù)預置和設定,高質量地完成商品的掃描、填充、貼單、包裝等任務,在當前社會背景下具有良好的應用前景。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學學報(2019年6期)2019-08-13 07:04:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
