IRN-120型鐵鉆工的研制
2018-10-20 02:42:48郝山波
新型工業化 2018年8期
關鍵詞:結構
郝山波
(上海中曼石油裝備有限公司,上海 201306)
0 引言
在修井和鉆井操作中,起、下鉆操作是高頻率工作,在起下鉆操作中操作者的勞動強度大,安全性差,效率低。為了滿足海洋與陸地石油現代化鉆井技術的發展需要,改變鉆井起下鉆作業中傳統動力大鉗上、卸扣作業的方式,適應快速發展的鉆井需要,歐美國家先后研制出集旋、緊、卸螺紋鉗和扭矩鉗于一體的動力鉗—鐵鉆工;鐵鉆工能夠代替操作工人完成鉆具的拆、卸,進而降低事故的發生概率和提高鉆井的效率。目前,我國對鐵鉆工的研究還處于初級階段,只有少數企業研制出了集旋、緊、卸、上扣于一體的鐵鉆工,但是鐵鉆工的實際工程應用不多。隨著石油鉆井技術的不斷進步,尤其是智能化、自動化技術的發展,國內鉆機市場對鐵鉆工的需求量逐漸增加,但是國外生產的鐵鉆工供貨周期長,價格貴,這就限制了鐵鉆工在國內的應用和推廣[1-2],進而也限制了中曼集團海外鉆井工程服務的發展。為了擺脫目前的這種困局,中曼集團集中優勢資源,經過多年的研發終于成功研制了適用于88. 9~254.0 mm鉆具的IRN-120型鐵鉆工。
1 IRN-120型鐵鉆工結構分析
IRN-120型鐵鉆工由工作鉗、伸縮臂架、回轉底座以及控制系統等組成;工作鉗包括旋扣鉗和沖扣鉗,伸縮臂架包括伸縮臂和連接體,回轉底座包括導軌和底座連接板,控制系統包括液壓系統和電氣控制系統[3],結構如圖1所示。

圖1 IRN-120型鐵鉆工總布置圖Fig.1 GA of IRN-120 type iron roughneck
沖扣鉗是由液壓缸驅動的沖扣工具,可以按照作業的要求沖緊扣或沖開扣,沖扣鉗的上、卸扣扭矩大小由沖扣鉗扭矩液壓缸的工作壓力控制,可根據不同的鉆具,設置不同的上、卸扣扭矩。旋扣鉗工作時,在液壓馬達的驅動下,摩擦輪旋轉帶動鉆具快速旋上或松開鉆具接頭,旋扣鉗采用開式結構,鉗口的大小由雙作用液壓缸的伸縮量控制;為了增大在豎直方向上鉆具的夾持范圍,旋扣鉗在液壓缸的作用下可以上、下移動。伸縮臂可以根據鉆具接頭的位置進行前后,高、低自動校正操作。IRN-120型鐵鉆工可以一次性完成鉆具的上扣、卸扣工作,能在井口和小鼠洞兩者之間自由切換;既能實現對井口鉆具的自動對中,完成上扣、卸工序,又可以實現在小鼠洞以最大10°前、后及左、右傾斜,完成鉆具的上扣、卸扣功能。
1.1 沖扣鉗
IRN-120型鐵鉆工沖扣鉗采用三點夾持結構,主要由背鉗、夾緊鉗、鉗體架、軌道、連接臂、夾緊液壓缸、扭轉液壓缸、鉗牙座以及其他部件組成,沖扣鉗外形結構如圖2所示。
背鉗和夾緊鉗結構基本相同;背鉗、夾緊鉗中間設有圓弧形軌道,工作時背鉗夾緊下部鉆具不動,夾緊鉗夾緊上部鉆具的同時可以繞背鉗轉動,實現鉆具的沖緊或沖開。夾緊液壓缸分別固定在夾緊鉗、背鉗殼體內,鉗牙安裝在活塞桿前端的鉗頭上,鉗牙的結構形式和材料直接決定了鉗牙的壽命,是鐵鉆工研發過程中的要點和難點;鉗牙在夾緊液壓缸的推動下,實現加緊鉆具的動作;左、右扭轉液壓缸分別位于鉗體架的兩側,沖扣鉗通過兩側扭轉液壓缸的伸縮來實現夾緊鉗和背鉗的相對轉動。沖扣鉗的扭轉力矩的大小可以通過調節扭轉液壓缸的工作壓力來實現;連接臂連接沖扣鉗到伸縮臂上,連接臂可以繞連接軸旋轉一定的角度,可以補償小鼠洞內鉆桿可能的傾斜角度[4]。
1.2 旋扣鉗
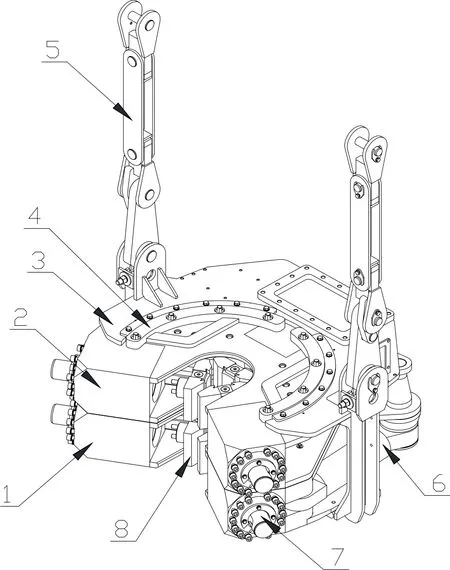
圖2 沖扣鉗結構圖Fig.2 The structure of torque wrench
旋扣鉗采用開放式結構鉗體,由摩擦輪、液壓馬達、夾緊架(左、右對稱)、夾緊液壓缸、導軌架、升降液壓缸、升降架等部件組成,旋扣鉗外形結構如圖3所示。旋扣鉗的導軌架通過螺栓固定在沖扣鉗的鉗體架上;摩擦輪分別安裝在左右夾緊架的前段,液壓馬達安裝在夾緊架上部,通過傳動軸與摩擦輪連接,帶動摩擦輪轉動;夾緊液壓缸的兩端分別連接左、右兩邊的夾緊架。鉗口的大小由夾緊液壓缸的伸縮量控制,夾緊液壓缸是雙向液壓缸,該結構可以實現夾緊的自動對中。夾緊架通過升降架與升降液壓缸相連;不同規格的鉆具接頭尺寸也不相同,升降油缸可以帶動旋扣鉗在豎直方向上、下移動,選擇合適的夾持位置,進而有效保護鉆具本體[5-6]。
旋扣鉗可以作為鉆具旋扣工具單獨使用,也可作為IRN-120型鐵鉆工的1個部件配合沖扣鉗共同完成鉆具的上扣、卸扣工序。當上扣作業時,旋扣鉗首先帶動鉆具快速順時針旋轉,然后夾緊鉗工作,將扣上緊。卸扣時夾緊鉗首先逆時針沖扣,然后旋扣鉗帶動鉆具快速逆時針旋轉,把鉆具接頭完全松開。旋扣鉗也以作為動力大鉗配合套管鉗實現套管的旋扣功能。
1.3 伸縮臂
伸縮臂主要由伸縮臂Ⅰ段、伸縮臂液壓缸、伸縮臂Ⅱ段、伸縮臂Ⅲ段、伸縮臂Ⅳ段、伸縮臂Ⅴ段等組成,伸縮臂外形結構如圖4所示。旋扣鉗連接在伸縮臂Ⅴ段上;其主要功能是將IRN-120型鐵鉆工旋扣鉗、沖扣鉗移送到井口、小鼠洞并回到原來位置。
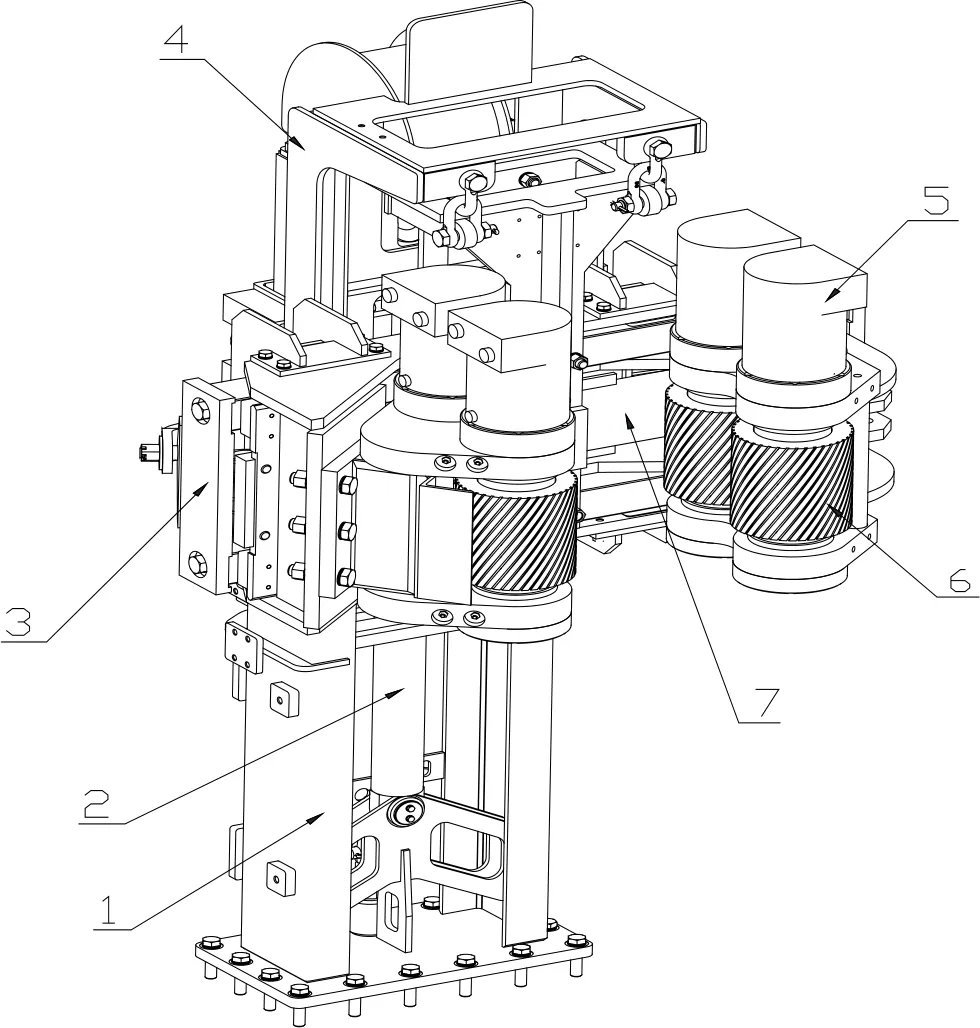
圖3 旋扣鉗結構圖Fig.3 The structure of spinner wrench
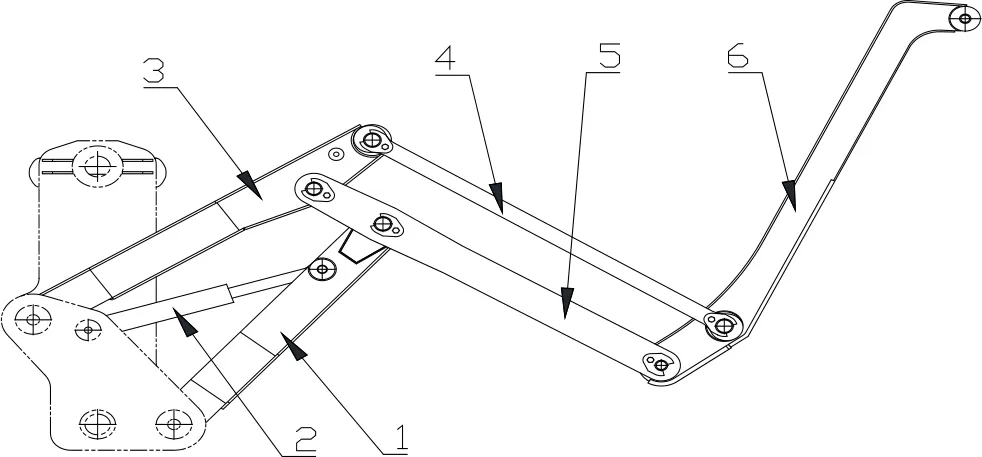
圖4 伸縮臂結構圖Fig.4 The structure of telescopic arms
為了滿足鐵鉆工伸縮臂在伸縮的過程中前端鉗體保持水平運動的要求,伸縮臂Ⅱ段、伸縮臂Ⅲ段、伸縮臂Ⅳ段、伸縮臂Ⅴ段組成一組平行四邊形機構相互約束聯動,根據切貝謝夫-克魯伯規律,該機構的自由度為1,因此只需要一組伸縮臂液壓缸,就可以完成伸縮動作。在伸縮臂伸展運動過程中,沖扣鉗、旋扣鉗沿近視水平方向運動[7-10]。
1.4 連接體、導軌
連接體、導軌主要由回轉支承、連接體、導向輪、導軌、升降液壓缸、液壓馬達等組成,外形結構如圖5所示。回轉支承上部和導軌剛性連接,下部固定在鉆臺面上;回轉支承在液壓馬達的驅動下,可以在水平面內轉動。連接體套裝在導軌上,在升降液壓的作用下,連接體可以在導軌上往復運動,導向輪安裝在連接體上,在導軌的軌道上自由滾動。
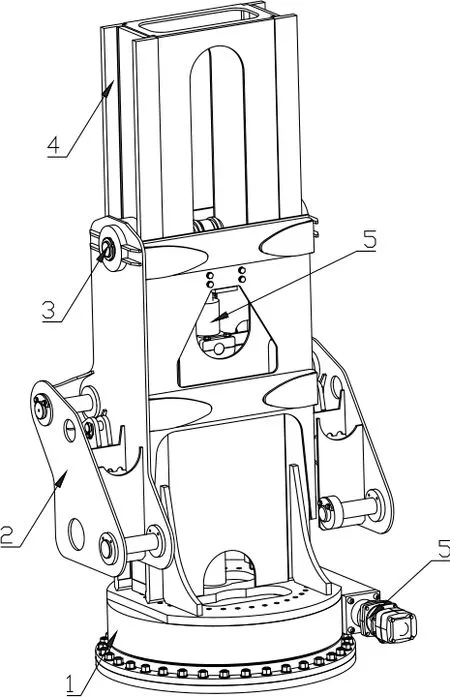
圖5 連接體、導軌結構圖Fig.5 The structure of telescopic arms
2 技術參數
IRN-120型鐵鉆工技術參數見表1。
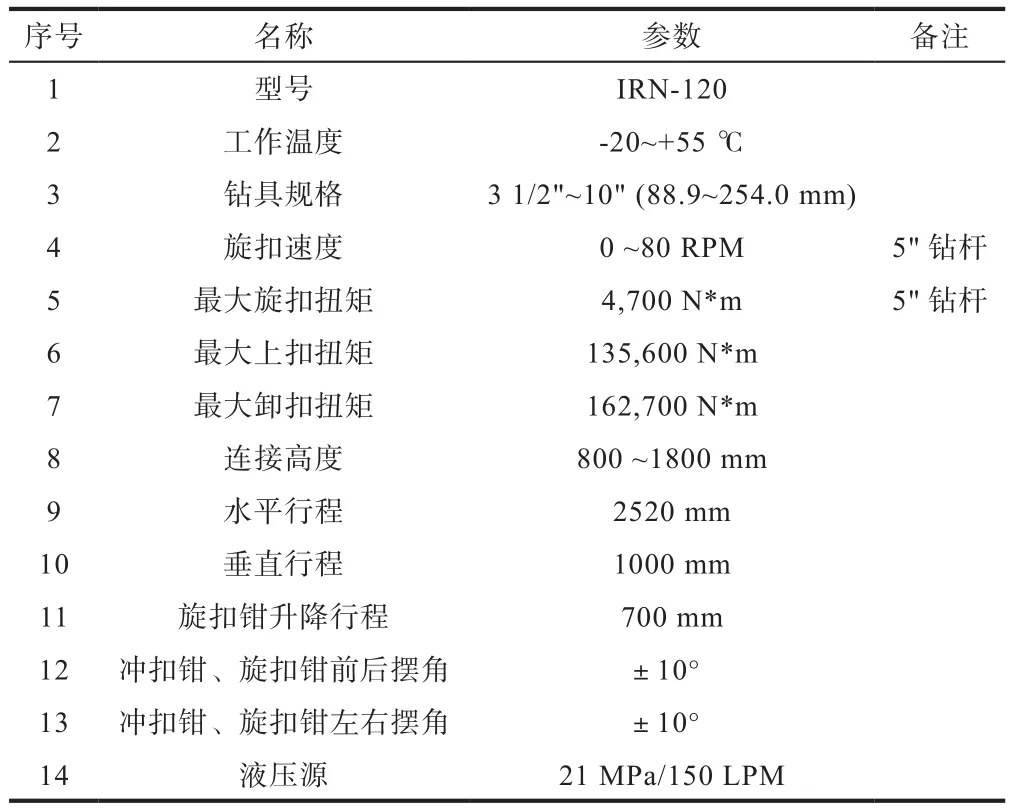
表1 IRN-120型鐵鉆工技術參數Table 1 Technical parameter of IRN-120 type iron roughneck
3 液壓系統
液壓系統由集成液壓站、閥組、機構執行單元(液壓缸、液壓馬達)、過濾器以及液壓管件等組成。液壓系統由回轉控制、整體升降控制、伸縮臂控制、旋扣鉗夾緊控制、旋扣鉗旋轉控制、旋扣鉗升降控制、沖扣鉗夾緊控制、扭轉液壓缸控制等部分組成。不同的控制閥組可以分別實現對回轉馬達、整體升降液壓缸、伸縮臂液壓缸、旋扣鉗夾緊液壓缸、旋扣鉗旋轉馬達、旋扣鉗升降液壓缸、沖扣鉗夾緊液壓缸、扭轉液壓缸等的控制。所有的控制閥塊都集成在結構體內,具有體積小、結構緊湊的優點。
4 電氣控制系統
電氣控制系統的設計考慮鐵鉆工作業高溫工況,以保證設備安全性、可靠性為第一要務,采用國際知名的PLC控制單元及無線控制技術,系統具有2種控制模式:本地控制模式和無線遙控模式。操作者持無線操作盒,可在距離設備100米的范圍內進行有效遙控操作。往返井口和小鼠洞的工作可以實現自動化、智能化操作;操作者可通過本地操作臺,實現對設備機構的“點對點”操作;2種控制模式可自由選擇,靈活方便。
5 試驗情況
IRN-120型鐵鉆工于2016年8月生產出樣機,在工廠進行各種試驗后,發往鉆井現場使用。1年多的實際工程應用結果表明,使用IRN-120型鐵鉆工后,鉆井起、下鉆作業中縮短了鉆臺面工人接、卸鉆具的工作時間,減輕了勞動強度,提高了作業效率,降低了人工成本。為了進一步滿足操作者的需要,研發人員正在結合井場的反饋信息,對IRN-120型鐵鉆工鉗牙的結構形式和熱處理工藝做進一步的優化設計以提高鉗牙的使用壽命。
6 結論
(1)IRN-120型鐵鉆工經過1年多的實際應用,功能完全滿足現場的工程需要;IRN-120型鐵鉆工的推廣將有助于提高鉆井作業的效率,減低操作人員的勞動強度以及促進鉆機鉆臺面的自動化、無人化操作。
(2)本文對IRN-120型鐵鉆工的結構和功能進行了詳細的描述,指出了設計過程中的要點和難點對將來鐵鉆工產品系列化起到借鑒作用。目前,根據中曼集團國際工程公司的需要,設計人員正在開發適用于極地、低溫鉆機的鐵鉆工。
(3)IRN-120型鐵鉆工是智能化、自動化陸地鉆機的重要設備之一,它的研制成功,可以帶動鉆井智能化、自動化升級換代,具有良好的社會效益和廣闊的市場前景。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50