硬X射線調制望遠鏡衛星系統級自主功能設計與在軌驗證
2018-11-03 06:42:08顧荃瑩潘騰倪潤立張龍梁中堅
航天器工程 2018年5期
顧荃瑩 潘騰 倪潤立 張龍 梁中堅
(北京空間飛行器總體設計部,北京 100094)
硬X射線調制望遠鏡(HXMT)衛星攜帶了高 能、中能、低能3種準直型望遠鏡,通過巡天、定點、小天區等不同姿態指向控制的空間觀測模式對遍布全天球的天體目標開展觀測[1]。作為我國首個大型空間天文任務,HXMT衛星具有全天球任意指向、多種空間姿態控制方式頻繁切換、全空間測控數傳覆蓋、每天連續境外時間長(12 h)、載荷長期開機連續觀測、同結構安裝的不同載荷工作溫度要求差異大且部分載荷低溫控制要求高以及對空間環境敏感等特點。多任務、多約束特點使得HXMT衛星功能設計具有很大難度,也和傳統衛星設計不一樣。
傳統航天活動中,主要由地面測控對航天器進行控制與管理。但隨著航天任務需求的快速增長和航天器在軌任務模式的發展,高度依賴地面進行航天器控制管理的缺點日益明顯[2],如頻繁的天地交互對通信實時性的要求難以滿足、龐大的地面系統和地面工作量增加了運營成本、對地面依賴造成在軌任務不能及時實施且影響系統可靠性。因此,從好用、易用、安全、可靠的角度出發,設計具有HXMT衛星鮮明特點的自主規劃、自主管理和自主保護功能,以提高衛星的科學觀測效率、在軌生存能力、使用便捷性和與用戶的直接交互能力,以及科學數據下傳處理的及時性,確保任務科學產出最大化,同時降低地面運行的工作量,提高系統可靠性。這也正符合航天器向智能化、靈巧化方向發展的趨勢。
本文從HXMT衛星的自主功能設計框架出發,重點對系統級自主功能進行研究,并通過在軌實施結果驗證其應用效果。
1 衛星自主功能設計框架
HXMT衛星的自主功能基于系統頂層策劃,以任務需求為目標導向,以星上、地面資源和使用條件為約束,采用分布式體系結構和模塊化的設計思路,遵循可交互性、可服務性、開放性的原則[3],從智能規劃、智能執行、故障檢測與自主處理、系統重構等方面進行功能分級、功能交互關系以及信息流向設計,系統結構簡化框架見圖1。
HXMT衛星的自主功能分為系統級和子系統級兩層。子系統級自主功能主要是分系統/子系統內部的故障監測診斷、處理與重構、規劃與調度等,如數管分系統對遙測、時鐘等關鍵接口電路的自測試與自診斷操作,控制分系統對陀螺、動量輪等部件的故障診斷與組態重構等。子系統級自主功能由各分系統/子系統獨立實現,以即插即用的結構集成至整個衛星系統內,可根據需求靈活調整。

圖1 HXMT衛星自主功能系統結構簡化框架Fig.1 Simplified autonomous functions system architecture for HXMT
系統級自主功能是從總體層面進行系統的全局決策和處置,由星上多分系統聯合,在不占用衛星太多資源和成本的基礎上實現。HXMT衛星的系統級自主功能以任務需求為設計導向,以高用戶直接交互能力、高自主性、使用靈活便捷和高安全性為設計目標,以數管計算機(主)和控制計算機(輔)為具體實施核心,各功能模塊化分解和實現。同時考慮開放性與獨立性的統一,在強調衛星內部自治的同時保留地面測控介入控制的能力,保障衛星安全[4]。HXMT衛星的系統級自主功能包括自主規劃、自主管理、自主保護三大類12種,實行功能編號化管理,其中9種為全新設計,具體見表1。
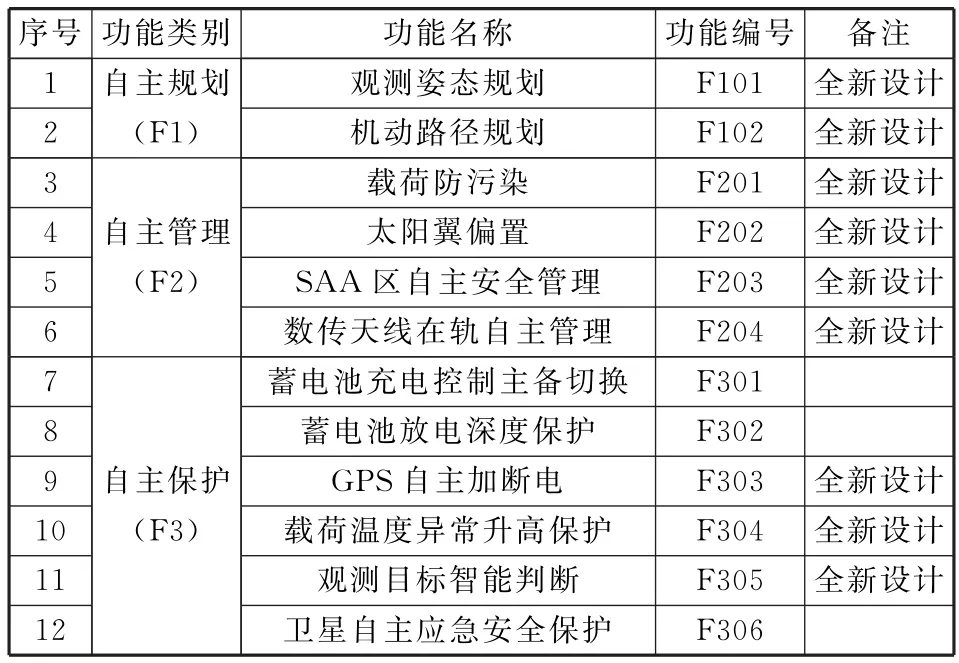
表1 HXMT衛星系統級自主功能Table 1 System autonomous functions for HXMT
2 衛星自主功能設計與在軌驗證
2.1 自主規劃功能設計與在軌驗證
1)觀測姿態規劃功能設計
HXMT衛星充分考慮科學觀測需求、載荷熱控約束、控制實施能力和地面數據處理的難度并兼顧整星能源需求,設計了巡天、定點、小天區3種采用不同姿態指向控制方式的觀測模式,分別實現對整個天球的掃描覆蓋、指定天體目標的定向深度觀測和指定天區的深度掃描觀測[5]。
HXMT衛星實現了基于模型的觀測姿態在軌自主規劃,觀測過程中衛星的三軸姿態指向、掃描起點、掃描路徑等,由星上根據觀測模式、觀測目標參數以及星載太陽歷、星歷,基于各模式下的觀姿態確定模型在軌進行計算規劃,并自主執行。設計上具有良好的用戶直接交互能力,可直接提取地面觀測計劃中的觀測參數進行規劃并執行,提高了衛星易用性和可靠性。同時巡天模式通過自主的觀測姿態規劃,確保載荷視場始終不受地球遮擋,極大地提高了觀測效率。
2)機動路徑規劃功能設計
不同觀測目標、觀測模式間的頻繁切換,通過衛星的姿態機動來實現。為確保載荷性能可以進行連續觀測,機動過程中也必須滿足衛星與太陽相對關系約束,以防止載荷溫度升高。
基于此需求,HXMT衛星實現了基于模型的姿態機動路徑在軌自主規劃,根據機動前后觀測目標位置,結合觀測姿態規劃功能確定的衛星姿態,自主進行模式切換中的姿態變化過程規劃并實施。
根據一次姿態機動實施過程中衛星的光照條件,將姿態機動劃分為全地影機動(即整個姿態機動過程均處于地影區)和非全地影機動(即姿態機動過程中存在非地影時段,包括跨地影/陽照區機動和全陽照區機動)兩類,根據每次姿態機動實施時機,兼顧太陽相對關系約束和最短機動時間,選擇最優機動方式。
(1)全地影機動,采用一步機動方式完成,以最短機動時間和最短機動距離為優化目標,自主規劃機動路徑和機動速度。
(2)非全地影機動,采用分步機動方式完成,自主規劃機動步數、機動路徑和機動速度,在滿足避太陽要求的基礎上,以最短的機動時間為優化目標。
3)自主規劃功能的在軌驗證
截至HXMT衛星在軌運行1周年(2017年6月15日—2018年7月15日),星上自主執行了183個常規短期的觀測計劃、13個機遇目標的觀測計劃,完成了45個核心目標天體、22個銀道天區、9次蟹狀星云(Crab)總計1202次觀測,同時還進行了多次巡天掃描。HXMT衛星核心科學目標源的觀測已完成。目前,衛星基本保持著每天至少4~5個目標的觀測頻率[6]。
全部觀測計劃通過星上觀測姿態規劃和機動路徑規劃功能自主實施,得以及時、有效開展,載荷溫度始終穩定處于工作范圍內,平臺、載荷功能性能均符合指標要求,衛星自主規劃功能在軌應用效果良好,用戶使用感良好。
2.2 在軌自主管理功能設計與在軌驗證
1)載荷防污染功能設計與在軌驗證
HXMT衛星中、低能望遠鏡探測較低能區X射線,探測信號弱且探測器在軌裸露安裝,對有機物污染十分敏感。為防止衛星入軌后釋放的污染物在中、低能望遠鏡探測器區域冷凝吸附聚集,危害望遠鏡的探測性能,HXMT衛星設計了載荷防污染的自主管理功能。具體是通過對載荷溫度在軌監測、分析,實現中、低能望遠鏡探測器區域的自主加熱控制,使得探測器區域主動處于局部相對高溫。
由于污染物大量釋放集中于入軌初期,且中、低能望遠鏡需要工作于極低溫環境下,因此載荷防污染功能主要應用于中、低能望遠鏡首次開機前的入軌初期階段。
2017年6月15日,衛星射前狀態設置時載荷防污染功能開啟。在軌結果表明中能探測器陣列與其輻冷板之間溫差在6℃以上,低能探測器與其輻冷板之間溫差在2.5℃以上,滿足探測器陣列平均溫度相對于輻冷板平均溫度不小于1℃的要求。
6月19日,載荷防污染功能關閉,中、低能望遠鏡依次開機。后續獲得的工程數據和科學數據結果表明,中、低能望遠鏡性能良好,低溫狀態下的探測器污染防護有效。
2)太陽翼偏置功能設計與在軌驗證
為了使衛星供電設備在軌處于最優的工作狀態,防止整星在軌實際功率需求與地面預計差異可能對供電設備造成的危害,提高衛星可靠性和壽命,HXMT衛星設計了太陽翼偏置自主管理功能。可根據整星在軌實際功率需求,設置太陽翼在軌偏置角度(太陽矢量與太陽翼法線的夾角),星上自主根據各種工作模式的姿態特點,自主實現太陽翼太陽偏置角度定向和跟蹤管理。
飛控測試期間先后進行了兩翼同向旋轉偏置固定角度的同向10°、同向35°和兩翼反向旋轉偏置固定角度的差動35°的帆板偏置測試,并最終權衡能源、敏感器視場和姿態穩定性選擇了差動35°偏置作為HXMT衛星在軌前期的長期設置狀態使用。
在軌測試結果表明:通過對太陽翼偏置角度的合理設置,有效降低電源分系統單機和太陽翼的工作溫度(見表2),同時實現了整星高精度姿態穩定度性能,優于指標要求一個量級,有利于衛星在軌可靠地穩定運行。

表2 太陽翼偏置35°前后電源分系統溫度比對Table 2 Temperature comparison of powerequipments with solar panels offset before and after 35° ℃
3)南大西洋異常(SAA)區自主管理功能設計與在軌驗證
HXMT衛星運行于43°傾角、550 km的圓軌道,在軌會頻繁經過SAA區。SAA區的高能質子和粒子會對高能望遠鏡探測器的光電倍增管高壓電源造成永久損傷,同時該區域高能粒子背景也會使中、低能望遠鏡及搭載的X射線脈沖星導航探測器的數據采集無法分辨。為防止設備輻射損傷,避免星上數據存儲和用戶數據處理不必要的負擔,HXMT衛星設計了SAA區自主管理功能。
HXMT衛星的SAA區自主管理功能,有別于以往空間天文衛星只能依賴地面計算SAA區域并上注保護模式事件進行載荷保護的方式[7],充分利用星載設備實現了真正意義的在軌智能監測、決策及處置的自主管理。
具體是通過用于背景環境測量的粒子監測器(屬于高能望遠鏡的一部分)和空間環境監測器對主要集中于SAA區的特定能區粒子進行監測,結合地面計算上注的進出SAA區時間,基于星載分析模型,自主判定衛星的進出SAA區時間并自主生成指令開啟或關閉SAA區保護措施(即降低高能望遠鏡高壓和停止中、低能望遠鏡及X射線脈沖星導航探測器采集)。
該功能支持星上空間環境監測器和粒子監測器自主監測閾值判定和地面上注時間判定3種判據的單獨或組合使用,提高了在軌可靠性和使用靈活性。
衛星飛控測試期間,對SAA區自主管理功能進行了專項測試,并根據粒子監測器和空間環境監測器的實際在軌性能對功能模型參數進行修正,測試結果表明各種組合判據下對載荷設備的保護功能有效。
衛星在軌運行至今,SAA區自主管理功能作為長期在軌使用的自主管理功能處于3種判據同時開啟狀態,在此期間全部載荷在軌性能良好,SAA區保護措施有效實施。
4)數傳天線在軌自主管理功能與在軌驗證
針對衛星在軌無固定對地面,且過境姿態不確定的特點,HXMT衛星使用了2副半球天線全空間覆蓋分時復用的數傳方案,這就需要每次數傳時根據衛星姿態選擇對地條件好的1副作為當班天線。
傳統的方法通常是由地面進行預報并通過指令上注延時執行的方式進行天線切換和數傳通道的開關機操作[8]。但由于HXMT衛星有巡天和小天區2個掃描模式,地面預計比較困難,尤其是小天區觀測模式還采用的是往復掃描的方式,且由星上全自主規劃實施,不中斷觀測的情況下,地面預報的精度根本無法達到數據接收的要求。
為保證科學觀測任務的連續實施、大量科學數據及時下傳,降低地面長期運營的工作量,HXMT衛星設計了數傳天線在軌自主管理功能,實現了巡天、定點、小天區3種姿態指向控制的空間觀測模式下全自主的當班數傳天線優選、切換以及數傳通道的開關機控制管理。
數傳天線在軌管理功能與地面具有良好的直接交互能力,可直接提取地面應用系統數傳計劃中的數傳弧段、地面站調度結果、數據回放要求等信息,基于星載智能管理模型進行天線對地姿態預估、單次過境天線對地姿態變化趨勢分析、當班天線決策和數傳通道控制指令自主生成與實施調度。采用模塊化功能劃分,以數管計算機為調度核心,與控制、數傳、數據記錄分系統明確功能界面,功能模塊通用化設計,便于修改和維護。
衛星飛控測試期間進行了15次數傳天線在軌自主管理功能測試,全部由用戶的數傳計劃發起,覆蓋全部觀測模式、地面站、數傳天線使用方式和回放方式,所有軌次的數據均接收成功,地面接收正確沒有數據丟失。測試結果表明,數傳天線在軌自主功能在軌執行正確,地面應用-地面測控-衛星執行接口匹配,數傳弧段利用率由地面控制時50%提升至70%。
衛星交付后,數傳天線在軌自主管理功能作為長期運營的基本狀態使用,極大的提升的科學數據下傳的及時性和可靠性,降低了地面運控系統的工作量,用戶使用感良好。
2.3 在軌自主保護功能設計與在軌驗證
為了適應HXMT衛星科學載荷長期開機工作、在軌姿態復雜多變、載荷工作溫度要求高、在軌自主動作多且直接由觀測計劃驅動、以及衛星軌道長時間連續不過境(每天連續12 h)等特點,衛星設計了6種系統級的自主保護功能,以提高衛星自主故障診斷、處理和生存能力。
載荷溫度異常升高自主保護功能:設計來源于復雜在軌姿態下的中、低能望遠鏡的低溫工作需求(中能望遠鏡-50~-10℃、低能望遠鏡-80~-42℃),實現了基于模型的中、低能望遠鏡長期自主的溫度狀態監測、異常升高狀態診斷和判定,并自主生成指令中斷觀測任務實施整星對日保護措施,等待地面處理,以避免未知原因的溫度異常升高對載荷造成不必要的損傷。
觀測目標智能判斷功能:設計來源于衛星全自主執行地面觀測計劃,而觀測目標與太陽的夾角的觀測時機約束必須通過觀測計劃制定的合理性來滿足。為避免地面規劃失誤或誤注錯誤指令導致衛星設備損壞,星上設計實現了觀測目標指向軸(+X軸)與太陽矢量夾角的在軌自主判斷,若不符合觀測約束則自主生成指令中斷觀測任務實施整星對日保護措施,等待地面處理。
GPS自主加斷電控制功能:設計來源于科學載荷觀測時間精度高度依賴于GPS秒脈沖輸出,當GPS出現故障時,觀測數據將失去其科學意義。為此星上設計實現了對GPS接收機工作狀態的長期自主監測,并在發生故障時進行自主診斷和處置,對GPS接收機進行重啟操作。
除了上述3種具有特色的自主保護功能外,HXMT衛星也具有防止蓄電池過充、過放的蓄電池充電控制主備切換功能和蓄電池放電深度保護功能,以及針對不同層級、不同故障原因的整星姿態失控的衛星自主安全保護功能。
衛星交付時,HXMT衛星的全部自主保護功能均已啟用。衛星在軌運行至今,所有自主保護功能持續進行狀態監視,未發生自主保護觸發事件。
3 結束語
隨著航天器數量大幅增長,長期在軌自主運行將是未來發展的必然趨勢,航天器的自主功能設計會越發重要。HXMT衛星作為我國首顆X射線空間天文衛星,從設計之初即以任務特點和任務需求為驅動,從好用、易用、安全、可靠的角度出發設計了多種自主功能,其中9種為全新設計,且設計時充分考慮了用戶的直接交互性、功能模塊化設計以及通用性,易于用戶直接使用、便于其他航天器借鑒和應用。HXMT衛星在軌一年多以來,自主功能應用效果良好,滿足了用戶對于衛星長期在軌運營的高觀測效率、高可靠、高自主和數據下傳及時、使用簡便靈活的需求。
參考文獻(References)
[1]Pan Teng,Ni Runli,Zhang Long,et al.Insight-HXMT:China’s first X-ray astronomical satellite[J].Aerospace China,2017,18(4):3-12
[2]Barney Pell,Douglas E Bernard,Steve A Chien,et al.An autonomous spacecraft agent prototype[J].Autonomous Robots,1998,5(1):29-52
[3]張健,戴金海.基于Agent的衛星自主控制體系結構[J].上海航天,2006(1),31-40 Zhang Jian,Dai Jinhai.Satellite autonomous control architectures based on Agent[J].Aerospace Shanghai,2006(1):31-40(in Chinese)
[4]代樹武,孫輝先.航天器自主運行技術的進展[J].宇航學報,2003,24(1):17-24 Dai Shuwu,Sun Huixian.Technical overview of autonomous control and on-board data processing for spacecrafts[J].Journal of Astronautics,2003,24(1):17-24(in Chinese)
[5]顧荃瑩,王穎.天文觀測任務對航天器總體及控制系統的新需求[C]//中國宇航學會飛行器總體專業委員會第11屆學術研討會.北京:中國宇航學會飛行器總體專業委員會,2010 Gu Quanying,Wang Ying.The new requirements of spacecraft and AOCS for astronomical observation mis-sion[C]//The 11thConference of Professional Committee of spacecraft System Engineering,CSA.Beijing:Professional Committee of Spacecraft System Engineering,CSA,2010(in Chinese)
[6]中國科學院高能所.硬X射線調制望遠鏡已觀測列表[EB/OL].[2018-09-04].http://hxmt.org/index.php/plan/oklist Institute of High Energy Physics,CAS.List of sources observed by Insight-HXMT[EB/OL].[2018-09-04].http://hxmt.org/index.php/plan/oklist(in Chinese)
[7]梁耀明,馬苗,王連國,等.星載有效載荷自主探測管理方案設計與實現[J].空間科學學報,2016,36(2):209-214 Liang Yaoming,Ma Miao,Wang Lianguo,et al.Designing and implementing of the payload self-exploration[J].Chinese Journal of Space Science,2016,36(2):209-214(in Chinese)
[8]熊蔚明,程鑫,葉云裳,等.空間慣性定向姿態衛星數傳鏈路設計[J].空間科學學報,2014,34(4):483-488 Xiong Weiming,Cheng Xin,Ye Yunshang,et al.Payload data transmission link design for the satellite with attitude of inertial space orientation[J].Chinese Journal of Space Science,2014,34(4):483-488(in Chinese)
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
