基于方向盤信號的高速公路駕駛狀態檢測方法
2018-11-03 07:39:10李洪濤巴興強逯兆友呂思昂
山西建筑 2018年28期
李洪濤 巴興強 逯兆友 張 涵 呂思昂
(東北林業大學交通學院,黑龍江 哈爾濱 150040)
0 引言
隨著駕駛時間的增加而出現疲勞駕駛會延長駕駛員的對光、聲等外界刺激的反應時間,導致發生交通事故的概率大大提高[1]。已有研究表明方向盤操作特性和駕駛員的意識水平之間存在極大的關聯性,方向盤轉角不動時間能夠表明駕駛員疲勞程度,不動時間越長,表明駕駛員疲勞程度越大[2],可以及時反映駕駛員疲勞程度,并對駕駛員進行預警。
目前已有很多學者針對方向盤的調整和駕駛員睡意之間的相關性進行了研究,并提出了相應的識別模型。Thiffault通過在轉向柱的軸線放置電位器來測量方向盤的轉角并以此檢測駕駛員的駕駛狀態[3]。張希波以方向盤的零速百分比和角度標準差作為判別指標并建立fisher判別模型對駕駛員的疲勞程度進行監測[4];陳志勇利用BP神經網絡對駕駛員疲勞駕駛時的車輛行駛特性進行訓練,并建立了疲勞駕駛行為檢測模型[5];屈肖蕾將駕駛員處于不同駕駛狀態的操作數據中抽取的判別指標的均值作為參考指標,并提出了帶有個體差異性的疲勞檢測模型[6]。杜洪吉針對車輛的運行速度、方向盤操作信息和車輛橫向位移對疲勞駕駛的駕駛適應性和主觀操作特征進行分析,并提出了疲勞駕駛行為的檢測方法[7]。目前針對這方面的研究大多采用時域分析方法對方向盤操作信息特征分析和指標提取。
本文從頻域的角度對不同駕駛狀態下的方向盤操作信息進行頻譜特性分析,采用方向盤角度百分比功率譜密度及角速度百分比功率譜密度作為疲勞判別指標,將判別指標及駕駛狀態作為模型的輸入和輸出對BP神經網絡進行訓練,構建相應的網絡模型,并以疲勞狀態的分類正確率最大為優化目標確定疲勞檢測取樣窗口大小,最后利用測試樣本數據對模型的準確率進行驗證。
1 實驗
1.1 數據采集環境
考慮到實驗的安全性與可靠性,本文利用駕駛模擬器進行模擬駕駛實驗,實驗選擇在一條高速公路場景進行,道路為雙向六車道,單車道寬3.75 m。被試人員共10名,其中5名男性,5名女性。實驗過程中要求駕駛人員盡量保持在車道中央行駛,減少變道行為,車速限制在80 km/h~100 km/h。實驗過程中采集的數據包括方向盤轉角速度、方向盤偏轉角度,采樣頻率為50 Hz。
1.2 疲勞狀態評價
為了分析方向盤操作信息與駕駛員疲勞狀態的關系,需要通過疲勞測試對駕駛員的疲勞狀態做出客觀的評價。
實驗開始前使用由哈佛醫學院睡眠醫學科開發的駕駛員反映時間測量系統(PVT),在輸入睡眠時長、起床后時長以及自我警覺度評價后,能夠通過測試系統定量地給出駕駛員反應時間影響因數。
長期致力于疲勞駕駛研究的震旦大學學者提出了困睡度量表的概念[8],結合這一概念制定了適合本文實驗的困睡度量表,將駕駛員駕駛狀態分為5個等級,如表1所示。

表1 困睡度量表
2 特征提取
2.1 疲勞狀態下的方向盤操縱特征
基于模擬駕駛對比實驗,駕駛員在正常和疲勞兩種駕駛狀態下的方向盤操作頻域特征如圖1所示。
圖1a)和圖1b)依次為清醒和疲勞狀態下的方向盤角度波形頻譜,通過對比兩種駕駛狀態下的頻譜特征,可以看出當駕駛員處于清醒狀態時,方向盤操作信號頻率成分較為復雜,而當駕駛員處于疲勞狀態時,方向盤操作信號頻率成分較為單一,低頻信號成分較高。

綜上所述,方向盤操作信息能夠反映駕駛員的駕駛狀態,本文將從頻域角度探究方向盤操作與疲勞狀態的關系。
2.2 指標提取
首先對采集的方向盤數據進行傅里葉變換,以實現將信號從時域到頻域的轉換,從而對信號進行頻域的分析,傅里葉變換公式為:
(1)
在頻域內描述信號特征的方法有很多,最常用的是使用功率譜密度來表示,信號x(t)的功率譜密度PSD定義為:
PSD=∣FFT(x(t))∣2
(2)
其中,FFT(x(t))為對信號x(t)進行快速傅里葉變換后的結果。
方向盤操縱信息隨著駕駛員的年齡、性別、駕駛習慣的變化而變化,因此使用絕對功率譜密度值來衡量駕駛狀態意義不大,為此本文將功率譜密度進行歸一化處理,并將所得結果定義為百分比功率譜密度D:
(3)
按照上述方法對方向盤的角度信號及方向盤角速度信號進行特征提取。圖2為各級疲勞狀態下方向盤角度百分比功率譜密度提取結果對比,圖3為各級疲勞狀態下方向盤角速度百分比功率譜密度提取結果對比。

從圖2,圖3可以看出,相對于清醒狀態,疲勞狀態下的方向盤角度及角速度的百分比功率譜密度顯著增大。
3 BP神經網絡識別分類器
BP網絡是通過足夠多的輸入與輸出模式之間的映射關系的學習,通過不斷調整傳遞函數的參數,逼近出一個準確的分類函數[9],因此它是有一種有指導的學習,能夠通過反向傳播來不斷調整網絡的權值和閾值,使網絡的誤差平方和最小,三層BP網絡拓撲結構如圖4所示。并更好地描述方向盤操作信息與駕駛員疲勞狀態之間存在著較為復雜的關系。
選取Radbas(徑向基傳遞函數)和Trasig(雙曲正切S型傳遞函數)分別作為輸入層到隱層及隱層到輸出層的傳遞函數;徑向基傳遞函數是一種局部逼近網絡,能夠解決訓練樣本較少的問題,而雙曲正切傳遞函數可以保證輸出值在[-1,1]以內。將方向盤角度百分比功率譜密度和方向盤角速度百分比功率譜密度作為輸入層,疲勞狀態作為輸出層,其中0為清醒狀態,1為疲勞狀態。
通過對檢測系統取樣檢測窗口進行了分析,以疲勞狀態的分類準確率最大為優化目標,最終將取樣檢測窗口確定為60 s。

4 實驗驗證
首先向預先搭建的神經網絡輸入已知的訓練樣本。接下來從訓練樣本集以外的樣本中隨機選取177個測試樣本作為測試樣本集,其中疲勞樣本數為43個,清醒樣本數為134個,測試樣本中只有1和0樣本。最后將測試樣本作為神經網絡的輸入,對該方法的準確率進行評測,當模型的檢測結果與實際狀態一致時,即視為識別正確。檢測結果如圖5所示。
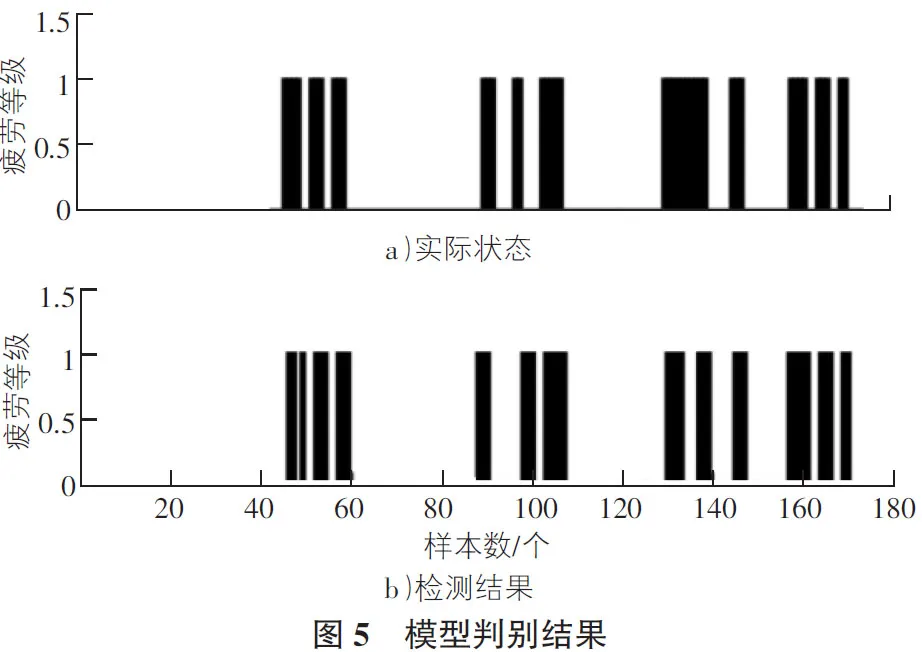
經驗證,該模型清醒狀態的正確識別樣本數為128個,誤識別6個,疲勞狀態的正確識別樣本數為34個,誤識別9個,合計正確識別樣本162個,識別準確率為91.5%。
5 結語
基于對不同疲勞等級下的方向盤操作特性及其頻譜特性進行分析,采用方向盤角度百分比功率譜密度及角速度百分比功率譜密度作為疲勞判別指標,將判別指標變量及駕駛狀態作為模型的輸入和輸出對BP神經網絡進行訓練,構建相應的網絡模型,并以疲勞狀態的分類準確率最大為優化目標,確定疲勞檢測取樣窗口為60 s,最后利用測試樣本數據對模型的準確率進行驗證,結果表明,該方法對駕駛狀態的分辨正確率可達到91.5%。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
公民與法治(2016年4期)2016-05-17 04:09:26