多普勒盲區(qū)下基于GM-CBMeMBer的多目標跟蹤算法
2018-11-06 09:50:10,,,,
雷達科學與技術 2018年5期
關鍵詞:檢測
, , , ,
(空軍預警學院, 湖北武漢 430019)
0 引言
在機載多普勒雷達多目標跟蹤(Multi-Target Tracking, MTT)過程中,多普勒盲區(qū)(Doppler Blind Zone, DBZ)的存在是不可回避的現(xiàn)實問題[1-3]。DBZ問題由傳感器物理限制產生,當目標的徑向速度小于最小可檢測速度(Minimum Detectable Velocity, MDV)時,目標無法被傳感器檢測,這將導致目標漏檢和航跡中斷,嚴重影響跟蹤性能[4]。
文獻[5]提出了基于高斯混合(Gaussian Mixture, GM)的跟蹤算法,它通過引入偽造量測來代表漏檢,通過構造合適的狀態(tài)依賴的檢測概率,使其在DBZ里的檢測概率值較低。然而,由此得到的高斯混合近似可能有負的權重,造成數(shù)值不穩(wěn)定。文獻[6]提出了“兩偽造點”分配方法,其中,一個偽造量測代表對應檢測概率小于1造成的漏檢,另外一個額外的偽造量測代表由于DBZ引起的漏檢。文獻[7]基于二維分配方法,通過對來自同一目標的不同時間段航跡進行關聯(lián),提出了航跡段關聯(lián)(Track Segment Association, TSA)方法。
然而,上述算法的實現(xiàn)涉及復雜的數(shù)據(jù)關聯(lián)問題,實用性有待提高。作為一種可替代傳統(tǒng)基于數(shù)據(jù)關聯(lián)算法的方法,基于隨機有限集(Random Finite Set, RFS)的多目標跟蹤算法在解決DBZ問題中有著顯著優(yōu)勢。其中,文獻[8-9]分別將概率假設密度(Probability Hypothesis Density, PHD)和勢化概率假設密度(Cardinalized PHD, CPHD)應用于DBZ條件下的地面動目標指示(Ground Moving Target Indicator, GMTI)跟蹤。不同于PHD傳遞一階矩、CPHD傳遞二階矩和勢分布,文獻[10]提出的勢平衡多目標多伯努利(Cardinality Balanced Multi-Target Multi-Bernoulli,CBMeMBer)濾波器通過傳遞多伯努利RFS來遞推估計后驗多目標概率密度。
CBMeMBer濾波器提供的“假設航跡”機制更有利于解決DBZ條件下的多目標跟蹤問題,不過在CMeMBer框架下的相關研究還鮮有報道,所以本文在CBMeMBer濾波器中引入MDV和多普勒信息,并給出了其高斯混合執(zhí)行,記為GM-CBMeMBer-D-MDV。仿真結果表明,所提濾波器能有效地改善DBZ下多目標跟蹤性能。
1 CBMeMBer濾波器

1.1 預測步


(1)
(2)

(3)

1.2 更新步


(4)
Mk|k-1=Mk-1+MΓ,k
(5)
(6)
(7)
(8)

(9)
ψk,z(x)=gkz|xpD,k(x)
(10)
式中:pD,k(x)為目標檢測概率;Zk為k時刻量測集合;κkz為雜波強度;gkz|x為目標量測似然函數(shù)。
2 帶最小可檢測速度和多普勒信息的GM-CBMeMBer濾波器
2.1 并入最小可檢測速度的檢測概率模型


(11)
(12)



(13)
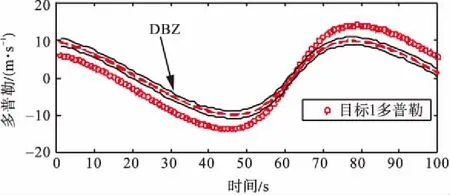
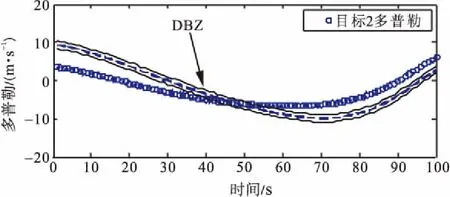
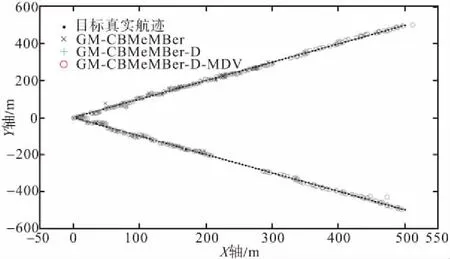
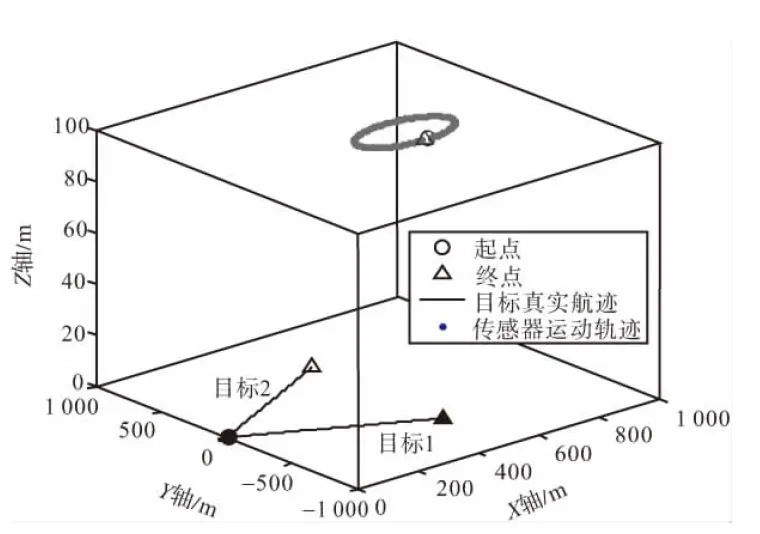
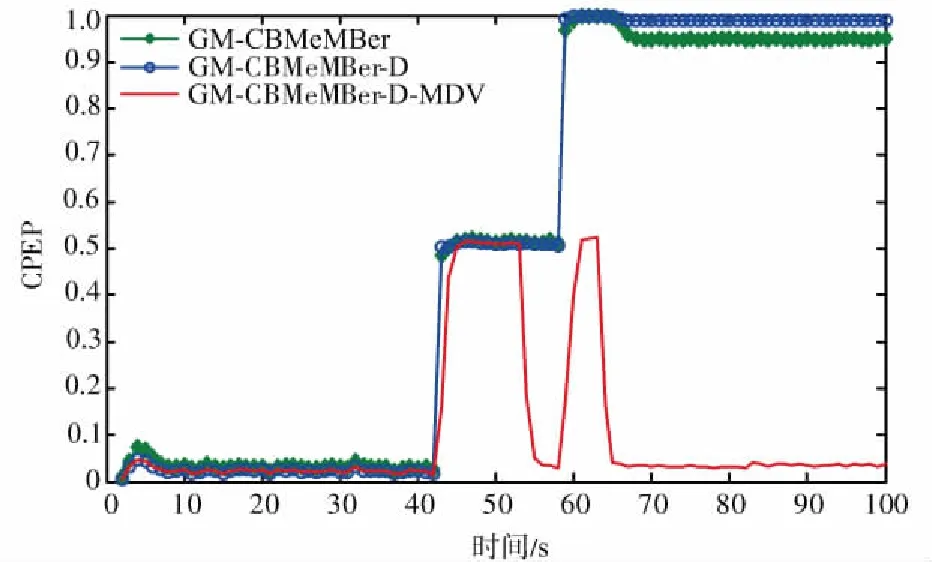
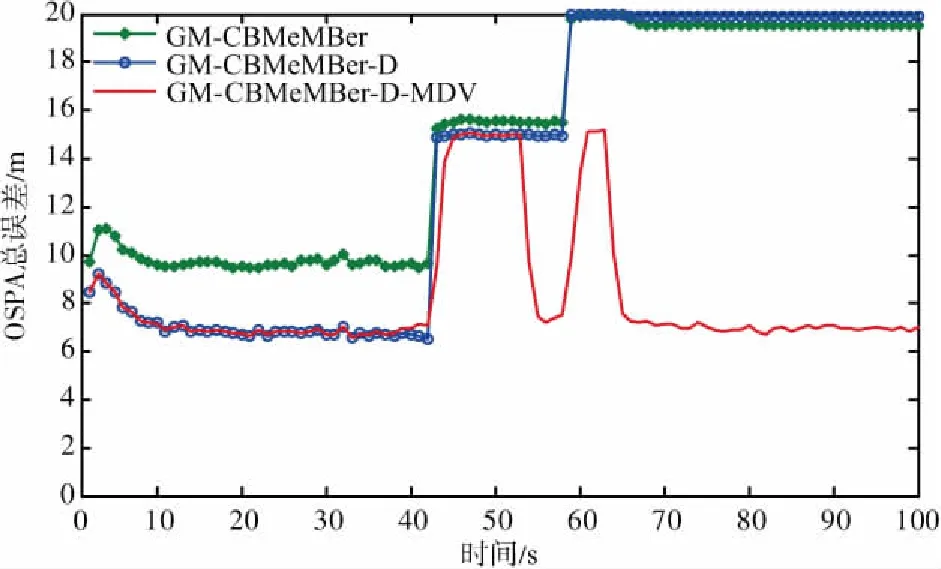
目標檢測概率pD,kxk是關于目標狀態(tài)的函數(shù),并且受DBZ強烈影響。具體而言,當nc pD,kxk≈pD1-exp-nc(xk)/MDV2·ln2 (14) 式中,pD為目標遠離DBZ的檢測概率值。 (15) 式中,偽量測函數(shù)yf和偽量測矩陣Hf分別為 (16) n1,n2,n3,n4,n5,n6T (17) 將式(15)代入式(14),進一步化簡得到檢測概率的高斯形式: (18) (19) (20) 在推導GM-CBMeMBer-D-MDV的更新公式的過程中,利用了下述兩個引理[12]: 引理1:給定適當維度的H,R,m和P,且R和P是正定的,則有 Nz;Hx,RNx;m,P= Nz;Hm,SN(x;m+G(z-Hm),P-GSGT) (21) 式中,S=HPHT+R,G=PHTS-1。 引理2:給定適當維度的F,Q,m和P,且Q和P是正定的,則有 N(z;Fm,Q+FPFT) (22) 假設目標xk-1在k時刻存活,則xk-1轉移到xk的概率轉移密度函數(shù)為 fk|k-1(xk|xk-1)=N(xk;Fk-1xk-1,Qk-1) (23) 式中,F(xiàn)k-1為狀態(tài)轉移矩陣,Qk-1為過程噪聲協(xié)方差。 對于多普勒體制雷達,式(10)中的量測似然函數(shù)gk(z|x)可以建模為 (24) 式中,z為k時刻的常規(guī)量測,包括位置量測yc和多普勒量測yd,且兩者不相關,Hc,k為線性位置觀測矩陣,Rc,k為位置觀測噪聲協(xié)方差,σd為多普勒觀測噪聲標準差,hd,k(x)為式(11)的非線性多普勒觀測函數(shù)。 (25) 將式(18)的檢測概率模型和式(24)的似然函數(shù)代入式(4)中,連續(xù)使用兩個引理得到GM-CBMeMBer-D-MDV的更新公式: (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) 式中,偽量測增益和偽量測新息協(xié)方差分別為 (36) (37) (38) (39) (40) (41) (42) 式中,位置量測增益和位置量測新息協(xié)方差分別為 (43) (44) 多普勒量測增益和多普勒量測新息協(xié)方差分別為 (45) (46) (47) (48) (49) (50) (51) 式中,偽量測增益和偽量測新息協(xié)方差分別為 (52) (53) κk(z)=κc,k(yc)κd,k(yd) (54) (55) (56) (57) 式中,κc,k(yc)為位置分量雜波強度,κd,k(yd)為多普勒雜波強度。 此外,伯努利RFS和高斯分量隨著時間迭代不斷增加,如果不對其進行有效的管理,將嚴重影響濾波器運行效率,所以在完成更新步驟后,還需要進行“剪枝合并”操作[10]。 下面有3點值得注意: 1) 當MDV=0且cf=0時,GM-CBMeMBer-D-MDV變?yōu)閹Ф嗥绽樟繙y的GM-CBMeMBer,簡記為GM-CBMeMBer-D。 為了驗證所提濾波器的有效性,在相同參數(shù)下比較GM-CBMeMBer,GM-CBMeMBer-D和GM-CBMeMBer-D-MDV三種濾波器的跟蹤性能。 基于上述參數(shù)設置,圖1給出了傳感器和目標的真實航跡,圖2給出了MDV=1 m/s條件下各時刻目標多普勒速度與DBZ的關系。由圖2可知,因為目標多普勒速度值小于MDV,所以目標2和目標1分別在43~52 s和59~63 s處于DBZ。圖3給出了MDV=1 m/s條件下3種濾波器單次跟蹤結果比較,通過比較可知,當目標離開DBZ,僅GM-CBMeMBer-D-MDV能夠再次跟蹤目標。 (a) 目標1 (b) 目標2圖2 各時刻目標多普勒與DBZ的關系 圖3 單次跟蹤結果比較 圖1 傳感器和目標的真實航跡 利用圓位置誤差概率(Circular Position Error Probability, CPEP)[13]和最優(yōu)子模式分配(Optimal Sub-Pattern Assignment, OSPA)[14]比較3種濾波器的跟蹤性能。其中,CPEP可以反映濾波器對目標的“漏跟”概率,定義為 (58) 令位置誤差半徑r=20 m,OSPA的階參數(shù)p=2,截止參數(shù)c=20 m。在MDV=1 m/s條件下進行1 000次蒙特卡洛仿真,圖4和圖5給出了3種濾波器的CPEP和OSPA總誤差統(tǒng)計結果。由圖4可知,在43~52 s階段,目標2處于DBZ內,而目標1處于DBZ之外,所以3種濾波器均無法跟蹤目標2,但都能跟蹤目標1。因此,3種濾波器在這段時間的CPEP均保持在0.5左右,而圖5中3種濾波器的OSPA總誤差都處于較高的值,約為15 m。當目標2在第53 s離開DBZ后,GM-CBMeMBer-D-MDV能夠再次跟蹤目標2,對應的CPEP和OPSA總誤差回到目標2進入DBZ前的水平。但是GM-CBMeMBer和GM-CBMeMBer-D無法有效保存處于DBZ內的目標狀態(tài),當目標2處于DBZ內,傳感器無法獲得目標量測,所以更新步驟結束后,多伯努利RFS的存在概率逐漸減小直至低于門限P,最后在“剪枝合并”過程中被刪除。目標2離開DBZ后,GM-CBMeMBer和GM-CBMeMBer-D無法再次跟蹤目標2,所以它們的CPEP和OPSA總誤差分別繼續(xù)保持在0.5和15 m左右。類似地,在59~63 s階段,目標1處于DBZ內,此時GM-CBMeMBer和GM-CBMeMBer-D均無法跟蹤兩個目標。因此,它們的CPEP和OSPA總誤差進一步升高到1和20 m左右。當目標1在第64 s離開DBZ后,GM-CBMeMBer和GM-CBMeMBer-D的CPEP和OSPA總誤差繼續(xù)維持在1和20 m左右,說明它們均無法再次跟蹤目標1。而GM-CBMeMBer-D-MDV的CPEP和OPSA總誤差減小到目標1進入DBZ前的水平,說明其能夠再次跟蹤目標1。 圖4 3種濾波器的CPEP比較 圖5 3種濾波器的OSPA總誤差比較 針對DBZ條件下機載多普勒雷達對目標航跡跟蹤不連續(xù)的問題,提出了帶最小可檢測速度和多普勒信息的GM-CBMeMBer濾波器(GM-CBMeMBer-D-MDV)。該濾波器首先將帶MDV的檢測概率模型代入CBMeMBer中,然后給出其詳細的預測和更新步驟。蒙特卡洛仿真實驗結果表明,相對于未并入MDV信息的GM-CBMeMBer和GM-CBMeMBer-D,GM-CBMeMBer-D-MDV能夠有效處理DBZ條件下的多目標跟蹤問題,提高DBZ下機載多普勒雷達多目標跟蹤性能。





2.2 GM-CBMeMBer-D-MDV更新公式

































3 仿真與分析



4 結束語
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:36
中學生數(shù)理化·七年級數(shù)學人教版(2019年9期)2019-11-25 07:34:34
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:50
中學生數(shù)理化·七年級數(shù)學人教版(2019年12期)2019-05-21 02:53:48