三維激光掃描技術在數字地形建模中的應用
2018-11-06 11:37:12李楊
中小企業(yè)管理與科技 2018年2期
關鍵詞:模型
李楊
(中國建筑材料工業(yè)地質勘查中心陜西總隊,西安 710003)
1 引言
三維激光掃描儀能以不接觸被測物體的方式快速獲取掃描范圍內高密度、高精度的三維點位坐標,其掃描速度可達數萬點每秒[1-2],按測距原理可分為:三角法、脈沖式、相位式和脈沖—相位式三維激光掃描儀[3],其作為一項實用高效的測量手段和技術,引進我國10余年來,已經得到了廣大測繪科技人員的關注和青睞[4]。
三維激光掃描儀目前在國內主要應用在建(構)筑物三維可視化模型建立,特別是歷史古建筑物的保存與恢復、變形監(jiān)測、地面建筑物、地下鐵路施工監(jiān)測、滑坡、泥石流、礦區(qū)地表沉陷等工程上的試驗性應用較多[5-7],在野外高精度特殊用途數字地形點云數據采集應用方面較少見,這主要是點云數據在“除噪”、“降噪”上難度較大,2011年我院承擔的生產項目是三維掃描技術在獲取高精度地形數據方面的一次大膽嘗試,為以后三維掃描技術在同類工程及地形數據采集方面積累了經驗。
2 項目區(qū)概況
項目區(qū)位于陜西省韓城市芝川鎮(zhèn)東少梁村境內的黃河臺塬上、著名旅游景區(qū)司馬遷祠對面、涺水河東岸。從西禹高速芝川大橋起向西北方向綿延約1.5公里長(一期工程)、寬200~400m之間。測區(qū)為典型黃土地貌,溝壑眾多,有一定植被覆蓋,施測困難。
項目要求數字地面模型點位采集密度達到10cm×10cm×10cm(XYH)的精度要求,塬上和塬下地勢平緩地區(qū)可放寬到30cm×30cm。常規(guī)測量方法難以滿足要求,因此采用三維激光掃描技術獲取項目區(qū)三維模型成果。
3 研究方法
3.1 測量方案
利用高精度GPS測量系統獲取已知反射點(靶標)的大地坐標(測區(qū)坐標系統)。同時利用激光掃描儀獲取已知反射點(靶標)的相對坐標。根據已知反射點大地坐標和相對坐標(工程坐標)進行相互轉化。
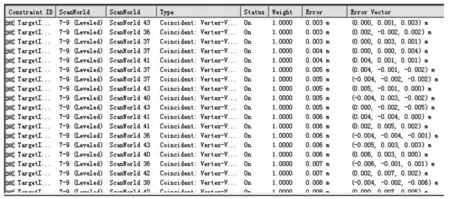
圖1 點云數據拼接誤差
野外數據采集過程中采用了自由設站的工作模式,每一測站數據采集完畢后同時對標靶進行掃描,然后用RTK測得標靶在GPS控制網中的三維坐標,根據測量標靶的三維坐標數據文件將掃描點云拼接在一起。野外工作實踐證明,這種工作模式比較適合大場景的地形掃描工程項目。
3.2 數據處理
內業(yè)數據處理主要采用Cyclone軟件和Geomagic軟件,利用Cyclone軟件進行點云數據拼接和數據預處理,利用Geomagic軟件進行點云數據精細化處理與三維數據建模。
第一,點云數據拼接。
利用Cyclone軟件中的Registration模塊將不同測站(ScanWorld)的數據拼接到一起,初始的坐標系統是由指定的其中某一個獨立的掃描儀的位置和方向決定的。將標靶的坐標文件(.txt)設置為目標測站(homeScanWorld),其余所有測站(ScanWorld)的點云數據以標靶的實測三維坐標為約束條件,通過旋轉相應三個方向的坐標軸拼接到home ScanWorld上去。點云拼接方式可選擇:點云—點云,點云—標靶,標靶—標靶。本次作業(yè)采用點云—標靶拼接方式,拼接誤差如圖1所示,可以看出拼接誤差為毫米級,完全滿足工程需要。
第二,點云數據預處理。
點云數據預處理主要是去除覆蓋于地形表面上的植被或是與地形信息不相關的人、電力線、建筑和其附屬設施等地形“噪音點”。主要采取兩個步驟:“點云分層和分塊”和“點云切片”。
點云分層和分塊。將覆蓋于地形表面上的高大植被或是掃描現場不相關的人、電力線、建筑等明顯不相關的信息通過手動的方式逐層、逐塊切割,將這些雜亂數據分配到噪音點圖層中去,此步驟需要大量的人工干預。
點云切片。通過點云的分層和分塊去除部分明顯噪音點后,用點云的切片功能來進一步精細處理那些不明顯的噪音數據(如:小草)。將整個項目區(qū)的點云數據沿等高線走向,每隔0.1m高程切割成若干切片,對每一條切片進行精細化去除噪音點。如圖2、圖3所示。

圖2 點云切片

圖3 噪音點數據
第三,Geomagic中去除噪音點。
經過對點云數據分層分塊、點云切片降噪處理后,把處理后點云數據導入到Geomagic中,通過自動去除噪音點(降低噪音點)、選擇體外孤點和去除琉璃三種數據處理方式,對點云數據做進一步精細化處理。
在去除噪音點的過程中會剔除大量冗余數據,植被茂盛的地方點云數據稀疏,甚至有一些空洞區(qū)域,直接構建數字地面模型不能很好地表達微地貌。因此利用具有無棱鏡測距功能全站儀或RTK對點云數據稀疏和有空洞的區(qū)域進行補測,補測點應能控制空洞區(qū)域地形總體特征,由于補測點的密度無法達到點云數據的密集程度,需通過數據內插的方法補充點云數據以達到微地貌建模的需要。
3.3 數據建模
第一,數字線劃圖(DLG)。
基于去除噪音點后的點云數據在Geomagic里對數字地面模型進行直接構建,通過測區(qū)三維數字地面模型生成0.5m等高距等高線,編輯后形成測區(qū)數字線劃圖。
第二,三維數據建模。
在Maya或3DMax下進行模型貼圖渲染,通過紋理貼圖、增加植被和建筑物模型、場景燈光設置、動畫渲染、效果調整等步驟對模型進行處理,模型導入導出過程中保證坐標信息不丟失。由于本次作業(yè)重點表達測區(qū)三維地形場景,在建筑物及其附屬設施建模、模型美化等方面投入精力較少,致使三維模型在表達植被、建、構筑物上視覺效果不佳。制作形成的測區(qū)三維地形數據場景如圖4所示。

圖4 測區(qū)三維數據模型
4 結語
三維激光掃描系統具有快速、細致和高精度的特點。將其應用在數字地形建模方面,可以減輕野外測量人員勞動強度,減少時間耗費,并能夠獲得滿意的地形建模結果。
本次作業(yè)所用掃描儀激光脈沖為單次回波,點云總數據量接近12GB,數據處理后有效點云數據不足4GB,造成大量數據冗余,局部地區(qū)在剔除噪音點后,仍需采用內插方式增加點云數據,內業(yè)數據處理工作量較大;若采用市場上較為先進的多次回波工作方式,能否有效降低數據冗余,提高數據處理效率,仍需進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
