分數階Newton-Leipnik混沌系統 滑模同步的兩種方法
2018-11-06 03:52:08毛北行
吉林大學學報(理學版) 2018年3期
毛 北 行
(鄭州航空工業管理學院 理學院, 鄭州 450015)
近年來, 對滑模同步問題的研究已引起人們廣泛關注[1-10]. 文獻[11]研究了一類分數階Duffling-Van der pol系統的同步控制問題; 文獻[12]研究了分數階多渦卷系統的同步控制; 文獻[13]基于滑模方法研究了一類不確定系統的同步問題; 文獻[14]研究了一類具有二次項的Mavpd混沌系統的動力學分析問題, 并討論了該系統的平衡點及穩定性; 文獻[15]研究了比例積分追蹤制導方法, 得到了精確的追蹤制導方法; 文獻[16]研究了一個新混沌系統的滑模控制問題. 在此基礎上, 本文研究分數階Newton-Leipnik混沌系統滑模同步, 并給出系統取得同步的充分性條件.
定義1[17]Caputo分數階導數定義為
分數階Newton-Leipnik混沌系統[4]為
(1)
當μ1=0.4,μ2=0.175,α∈[0.989,1]時, 系統(1)出現奇異吸引子. 以系統(1)作為驅動系統, 設計響應系統為
(2)
定義誤差
e1=x2-x1,e2=y2-y1,e3=z2-z1,
將式(1)與式(2)相減可得
(3)
1 滑模同步
假設條件:
(H1) |e2+10(y2z2-y1z1)|<ε1|e1|,ε1<μ1;
(H2) |-e1+5(x2z2-x1z1)|<ε2|e2|,ε2<0.4;
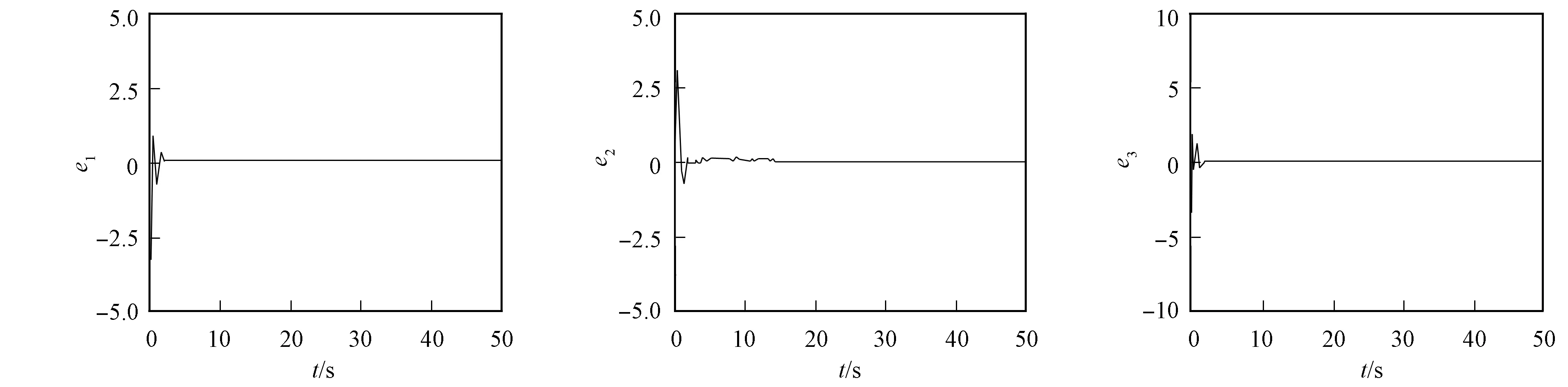
(H3)x1,y2為有界變量, 即存在正常數M>0, 滿足|x1| 則分數階系統(1)漸近穩定. 則分數階Newton-Leipnik主從系統(1)和(2)取得滑模同步. 證明: 在滑模面上運動時, 根據誤差系統方程(3)可得 構造函數 構造函數 由(H2)可得 再由 可得 又由于e1→0,e2→0, 且在滑模面上s=0, 因此可得誤差方程 由(H1)易得 -ε1|e1| 從而有 -ε1|e1|+e2<-10(y2z2-y1z1)<ε1|e1|+e2. 同理由(H2) 易得 -ε2|e2|-e1<-5(x2z2-x1z1)<ε2|e2|-e1, 從而可得 -ε1|e1|+e2-ε2|e2|-e1<-5(x2z2-x1z1)-10(y2z2-y1z1)<ε1|e1|+e2+ε2|e2|-e1. 又由于e1→0,e2→0, 因此由兩邊加定理易得 -5(x2z2-x1z1)-10(y2z2-y1z1)→0, 從而 不在滑模面上運動時, 構造Lyapunov函數V(t)=s2/2, 求導可得 因此s(t)是可積的且有界, 由引理2可知,s(t)→0. 定理2在假設條件(H1)~(H3)成立下, 選取 控制器 u(t)=-(k+μ2)e3(t)-ηsgn(s(t)),k>0 為常數, 則分數階Newton-Leipnik系統的主從系統(1)和(2)可取得比例積分滑模同步. 證明: 將等效控制器代入式(3)可得理想滑模方程為 (4) 在滑模面上運動時, 根據誤差系統方程(3)可得 構造函數 -5(x2y2-x1y1)=-5(x2-x1)y2-5x1(y2-y1)=-5e1y2-5x1e2. 當不在滑模面上運動時, 選取Lyapunov函數V(t)=s2/2, 求導可得 根據引理2可知,s(t)→0. 選取系統參數μ1=0.4,μ2=0.175,α=0.93, 設置系統初始值為 (x1(0),y1(0),z1(0))=(2,1,3), (x2(0),y2(0),z2(0))=(1,2,2), 分別采用定理1和定理2中的滑模面和控制器進行數值仿真, 定理1和定理2的系統誤差曲線分別如圖1和圖2所示. 由圖1和圖2可見, 開始時誤差相差較大, 隨著時間的延長, 系統誤差逐漸趨于一致. 定理1中當時間t>0.275 s后, 系統取得滑模同步, 定理2中當t>0.225 s后, 系統取得比例積分滑模同步. 顯然, 定理2比定理1中的控制器簡單且能在更短時間內達到同步. 圖1 定理1的系統誤差曲線Fig.1 System error curves of theorem 1 圖2 定理2的系統誤差曲線Fig.2 System error curves of theorem 2 綜上, 本文研究了分數階Newton-Leipnik混沌系統的滑模同步問題, 設計了滑模面和控制器, 并給出了系統取得同步的充分性條件, 最后通過數值算例驗證了該方法的可行性與有效性.





2 比例積分滑模同步


3 數值仿真
 猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20體育科技文獻通報(2022年3期)2022-05-23 13:46:54天津外國語大學學報(2021年3期)2021-08-13 08:32:18遼金歷史與考古(2021年0期)2021-07-29 01:06:54軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58科技傳播(2019年22期)2020-01-14 03:06:54裝備制造技術(2019年12期)2019-12-25 03:06:46民用飛機設計與研究(2019年4期)2019-05-21 07:21:24中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20體育科技文獻通報(2022年3期)2022-05-23 13:46:54天津外國語大學學報(2021年3期)2021-08-13 08:32:18遼金歷史與考古(2021年0期)2021-07-29 01:06:54軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58科技傳播(2019年22期)2020-01-14 03:06:54裝備制造技術(2019年12期)2019-12-25 03:06:46民用飛機設計與研究(2019年4期)2019-05-21 07:21:24中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
