本艇機動對魚雷武器系統攻擊效能的影響分析
2018-11-08 01:01:38王凱帥劉冠杉
數字海洋與水下攻防 2018年2期
關鍵詞:系統
王凱帥,孫 健,劉冠杉
(中國船舶工業系統工程研究院水下系統研究所,北京100094)
0 引言
隨著線導魚雷、聲吶和指揮控制技術的發展,使得搭載線導魚雷和聲吶的潛艇有可能在較遠距離上先敵發現、先敵攻擊。而線導魚雷發射后的本艇機動問題一直是上述領域的重點問題,線導魚雷發射后,本艇采用合適的機動方式,可以極大地增加導引過程中本艇對目標的有效探測時間,進而提高魚雷的導引效果。
潛艇典型魚雷攻擊過程一般經過情報處理判斷、目標運動分析、魚雷攻擊導引和攻擊效果評估4個階段,情報處理判斷是指潛艇開始接敵時,利用集合論方法對不同傳感器的探測信息進行是否同一歸類,通過前期的情報信息確認目標是否為需要攻擊的目標。目標運動分析一般在聲吶可以穩定跟蹤目標后進行,利用聲吶方位序列的處理方位確定目標的初距、航向和航速信息。魚雷攻擊導引一般在目標運動分析得到較為準確的結果后進行,主要指魚雷的射前檢查、射擊諸元計算和發射后魚雷的線導導引。在魚雷攻擊導引完成后,潛艇需要根據魚雷戰斗部狀態和目標噪音確認目標的近似毀傷程度,對本次攻擊效果進行評估[1]。
為了達到先敵發現、先敵攻擊的目的,潛艇武器系統一般采用現在方位導引法進行魚雷導引,該導引方法不依賴目標的運動要素(目標速度、距離、航向),僅獲得目標方位即可導引魚雷。但是該方法的不足在于,魚雷出管航行過程中,魚雷航行噪音易對本艇探測的目標噪音進行干擾,導致潛艇武器系統無法獲得目標方位,進而采用前期目標運動分析推算的方位進行現在方位導引,導致魚雷攻擊效能下降[2]。
本文建立潛艇聲吶系統雙目標分辨模型、武器系統目標運動分析和魚雷攻擊導引模型,分析潛艇發射后的機動對潛艇武器系統攻擊效能的影響。
1 聲吶雙目標分辨模型
實際魚雷使用過程中,在采用現在方位導引法導引魚雷攻擊目標的過程中,由于魚雷航行噪音對目標噪音的遮蓋效應,使得艇上聲吶系統不能在每個魚雷導引周期都能獲得目標的真實方位,而只能采用目標運動分析的推算方位,且聲吶系統探測目標方位存在固定誤差和隨機誤差,因此需要對聲吶探測目標的模型進行建模,本文采用了下述模型。
1.1 聲吶雙目標分辨模型
1.1.1 遮蓋條件
在下述條件下魚雷噪音遮蓋目標噪音,聲吶系統無法探測目標真方位,聲吶只能跟蹤魚雷噪音。
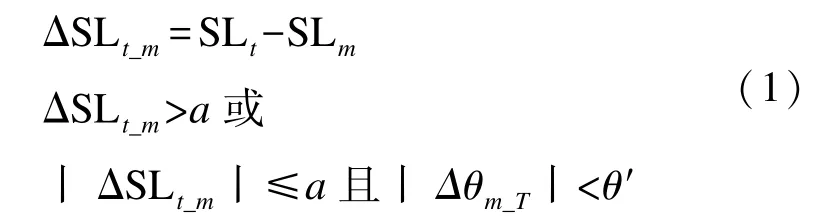
式中:SLt為魚雷在潛艇聲吶基陣處的某頻點上的噪聲級;SLm為目標在潛艇聲吶基陣處的某頻點上的噪聲級;a為可分辨的噪聲級差,dB;Δθm_T為目標魚雷的相對方位差;θ′為潛艇聲吶系統的分辨角,該參數一般是ΔSLt_m、目標和魚雷相對本艇角速度的函數,在導引過程中是變化的。
1.1.2 分辨條件
滿足下述條件時,聲吶能對攻擊目標進行跟蹤。

1.2 目標和魚雷輻射噪聲模型
目標聲源級采用如下經驗公式:

目標噪聲級采用如下公式計算:

式中:Vm為艦船航速,kn;T為艦船的排水量,t;f為噪聲頻率,kHz。
魚雷噪聲級采用如下公式計算:

式中SLt0為魚雷的聲源級,根據魚雷性能確定。
1.3 傳播模型
采用如下經驗公式:

式中:TL為傳播損失,dB;r為傳播距離,m;β為對數聲吸收系數6 dB/km。
2 目標運動分析算法
在實際攻擊過程中,艇上武器系統在魚雷噪音遮蓋目標時,可根據前期聲吶穩定跟蹤目標的方位序列(含有測量噪聲)進行目標運動分析,獲得目標運動的速度、航向和距離,推算的目標方位導引魚雷。
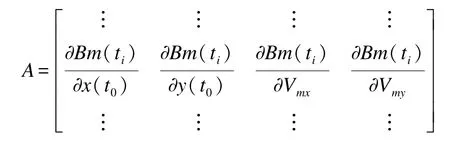
潛艇目標運動分析的主要方法是極大似然估計算法,對本艇若干次機動(一般經歷方位航向航路、擴大或減小方位變化航路和占位攻擊航路3個階段)以后的聲吶方位序列采用極大似然估計法估計目標的運動要素,當僅具有目標方位Bm的觀測時,觀測系統需要估計的狀態向量為

式中:x(t0)和y(t0)分別為開始目標運動分析時刻t0時的目標東向位置和北向位置;Vmx和Vmy分別為目標速度的東向分量和北向分量。
系統的觀測方程為

式中:Bm(ti)為開始目標運動分析后,某采樣周期點ti時刻的目標測量方位;nβ(ti)為目標方位測量噪聲。
系統雅各比矩陣為
利用如下迭代方程可求得目標極大似然估計解:

式中:Zm=[Zm(t0),Zm(t1),…,Zm(ti)]為測量方位序列;為第l次迭代狀態向量的估計值;+1為第l+1次迭代狀態向量的估計值;為根據生成的估計方位序列;ul為迭代步長;W為權值矩陣,在不明確方位測量方差規律時可以取為單位矩陣[3-4]。
3 潛艇魚雷攻擊過程建模
以潛艇發射尾流自導魚雷攻擊敵方水面艦艇為背景進行數學建模。

圖1 潛艇魚雷攻擊建模Fig.1 Modeling of torpedo attack by submarine
如圖1所示:Cw、Cm、Ct分別為潛艇、目標和魚雷的航向角;Vw、Vm、Vt分別為潛艇、目標和魚雷的速度;Dm、Dt分別為目標和魚雷距離本艇的距離;Bm、Bt分別為目標和魚雷相對本艇的方位。
潛艇武器系統在導引魚雷過程中可以通過本艇導航系統獲得本艇的航向角Cw、速度Vw;可以通過雷上線導系統獲得魚雷的航向角Ct、速度Vt和魚雷相對發射點的位置信息,通過計算可以得到魚雷距離Dt、魚雷方位Bt;可以通過聲吶系統獲得目標方位Bm,目標距離Dm可以通過噪聲強度進行粗略估計,目標航速Vm和航向Cm在快速攻擊過程中一般為未知的[5]。
由于目標航速Vm和航向Cm未知,因此采用現在方位導引法進行魚雷導引。
潛艇武器系統采用現在方位導引方法進行魚雷導引,該方法按照公式(9)生成魚雷的航向角指令:
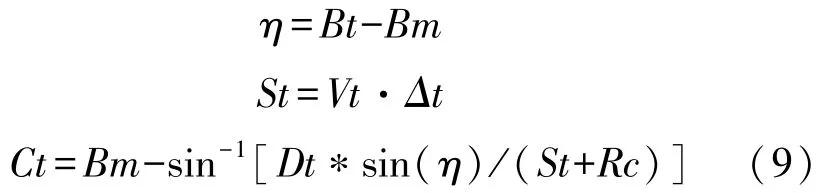
式中:η為魚雷相對于目標的方位差;Δt為艇上武器系統的導引周期;St為魚雷在一個導引周期內航行的距離;Rc為尾流瞄準點,代表魚雷穿越目標尾流航跡線時,期望的雷目距離[6]。
按照公式(10)計算魚雷是否開機,目標距離Dm可以在魚雷發射前進行粗略估計或采用目標運動分析得到的目標距離:

式中:Topen為自導開機的剩余時間;T為潛艇武器系統導引魚雷的時間;Vm′為由于目標運動分析后
圖2 現在方位導引魚雷彈道圖Fig.2 Trajectory diagram of torpedo guided by present bearing
的目標估計速度;k為系數,防止魚雷開機過晚導致錯過目標尾流,本文取0.7[7]。
按照現在方位導引法進行魚雷導引的效果圖如圖2。潛艇發射魚雷攻擊舷角100°,距離8 km,航速15 kn的目標,仿真中假設潛艇聲吶系統可以在每個魚雷導引周期實時的獲得目標的真方位,魚雷導引頭開機前魚雷航速為30 kn,魚雷導引頭開機后魚雷航速為60 kn。
4 仿真分析
按照上述數學模型對魚雷攻擊過程進行仿真,聲吶系統按照聲吶雙目標分辨模型探測目標方位,聲吶測量噪聲均值為0,方差為0.4,如果目標噪音被魚雷航行噪音干擾達不到目標的檢測條件,則采用目標運動分析推算的目標方位用于魚雷導引,所產生的推算誤差考慮到魚雷攻擊過程中。
對聲吶探測噪聲級差、聲吶分辨角和本艇機動對魚雷攻擊效果的影響進行仿真分析(假設本艇機動噪聲對聲吶系統無影響)。
潛艇發射魚雷攻擊舷角100°,距離8 km,航速15 kn的目標,其中聲吶系統可分辨的噪聲級差a為12 dB,聲吶系統分辨角θ′為5°,魚雷導引頭開機前魚雷航速為30 kn,魚雷導引頭開機后魚雷航速為60 kn。魚雷發射后,本艇以航向0和60°,速度4 kn航行,魚雷導引效果圖如圖3、圖4所示。
圖3 考慮聲吶分辨模型的魚雷導引彈道圖(Cw=0°,Vw=4 kn)Fig.3 Trajectory diagram of torpedo guidance considering sonar resolution model(Cw=0°,Vw=4 kn)
圖4 考慮聲吶分辨模型的魚雷導引彈道圖(Cw=60°,Vw=4 kn)Fig.4 Trajectory diagram of torpedo guidance considering sonar resolution mode(Cw=60°,Vw=4 kn)
對比圖3、圖4可以得出以下結論:
1)魚雷出管的導引初期(50 s之前),魚雷和目標的方位差和噪聲級差均無法滿足分辨條件,導致聲吶無法測量目標方位,而只能使用推算結果進行魚雷導引。
2)魚雷導引中期(自導開機前),魚雷和目標的方位差和噪聲級差是否滿足分辨條件,和本艇的機動存在關系,如果本艇進行擴大魚雷和目標方位差的運動,則有利于聲吶測量目標方位,此時的噪聲級差受本艇的機動影響不大。
3)魚雷導引末期(自導開機后),此時魚雷由于轉高速航行,此時魚雷的噪聲級會有大幅度升高,在這個階段的前期,魚雷噪聲級的提高和方位差減小均是影響聲吶對目標跟蹤的因素;在這個階段的后期,魚雷噪聲會大幅度衰減,滿足聲吶分辨的噪聲級差條件,聲吶可以對目標進行有效跟蹤。
4)不考慮本艇航行噪音和聲吶系統探測舷角的因素,魚雷出管后,本艇沿著超前魚雷方位和目標方位運動,有利于在魚雷導引過程中潛艇聲吶系統探測目標,進而提高魚雷的導引效果。
5 武器系統設計方案
實際潛艇武器系統設計時,可以在魚雷發射前采用數學仿真的方法對聲吶遮蓋點進行圖形化顯示,如圖3和圖4所示,輔助潛艇指揮人員進行評估與決策,導引過程中聲吶有效的導引點越多,越有利于線導魚雷方位導引武器系統時獲得最新的聲吶實測方位,形成新的方位序列,進而提高了線導魚雷的導引效果。
武器系統還可以進一步在魚雷武器系統中增加彈道分析評估軟件模塊(見表1),發射敵舷角為100°,尾流有效長度為300~1 390 m,表中數值為仿真10 000次的魚雷發現概率,利用蒙特卡羅方法進行效果評估,遮蓋點較少的本艇機動方案優于遮蓋點較多的本艇機動方案,利用蒙特卡羅方法對指標進行量化后,可以輔助潛艇指揮員進行魚雷出管后的潛艇機動[8]。
表1 導引效果評估表Table 1 Evaluation list of guidance efficiency
6 結束語
本文基于潛艇聲吶系統被動探測目標,發射線導魚雷攻擊水面艦艇的作戰背景,研究了典型態勢下魚雷發射后本艇戰術機動對線導魚雷攻擊效能的影響。根據魚雷作戰效能蒙特卡羅仿真方法,給出了魚雷發射后的本艇戰術機動最優方案。
武器系統可以在魚雷發射前設計仿真分析的環節,按照聲吶最小遮蓋原則,對魚雷發射后的本艇機動給出輔助決策,輔助潛艇指揮人員進行魚雷出管后的潛艇機動。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32